潛射線導魚雷蛇形彈道設計及仿真研究
2020-02-18 03:21:16王順杰許兆鵬朱偉良野學范
兵工學報 2020年1期
王順杰,許兆鵬,朱偉良,野學范
(海軍潛艇學院, 山東 青島 266199)
0 引言
線導魚雷攻擊是潛艇對水面目標遠距離攻擊的主要方式之一[1],從理論上講只要有目標方位信息就可以實施線導魚雷攻擊[2]。采用線導導引可擴大魚雷的攻擊范圍,攻擊速度快,因此,國內外遠航程魚雷大都采用線導導引[3-5]。線導魚雷基本導引方法主要有現在方位導引法、修正方位導引法、前置點導引法和人工導引法[6-11],任何一種導引方法的使用都需要滿足一定的條件,或者在某些特殊情況下使用[12],如前置點導引時需要有較為準確的目標運動要素,因此一般情況下在一次線導魚雷攻擊過程中應根據導引條件的變化適時調整導引方法,或通過合理的機動為導引創造條件[13-14]。
當沒有準確距離信息時,當目標舷角0°,很難解算出目標速度,此時由于沒有目標距離和速度信息,不宜采用前置點導引法和人工導引法。若魚雷按現在方位導引法對目標進行導引,則無論是聲自導魚雷還是尾流自導魚雷,命中角都很小,導致目標噪聲或尾流進入角都很小,不利于魚雷捕獲目標。
本文研究線導魚雷蛇形彈道搜索方法及其使用時機,不但可以利用魚雷蛇形機動產生一定的目標舷角,而且可以有效擴大魚雷搜索范圍,可提高魚雷捕獲目標的概率。
1 蛇形彈道搜索的概念
所謂蛇形彈道搜索是指魚雷按一定時間間隔交替向左或向右偏離主航向一定角度后直航搜索一定時間(直航搜索時間可以為0 s),以擴大搜索范圍,實現對目標的蛇形機動搜索。
2 蛇形彈道搜索使用時機
在線導魚雷攻擊時,為提高魚雷捕獲目標的概率,蛇形彈道搜索可在以下兩種典型情況下使用。
2.1 只有目標方位信息時的小目標舷角攻擊
沒有準確目標運動要素,只有目標方位信息時。如圖1所示,當目標舷角很小時,若強行采用現在方位導引法很難使魚雷有效捕獲目標尾流,魚雷命中角非常小。而該態勢下由于沒有準確目標運動要素信息,也不宜采用前置點導引法進行占位射擊,此時雖然可以采用人工導引法將魚雷向外導引,產生一定的舷角,但由于距離信息不準確,受到人為定性判斷局限性的影響,人工操作很難對魚雷進行持續、準確地導引[15]。

圖1 線導加尾流自導魚雷攻擊示意圖
因此,為了提高尾流自導魚雷捕獲尾流概率,若判斷目標舷角很小(0°左右),當目標方位與魚雷方位基本一致時,魚雷航向與目標航向大致相反,可適時控制魚雷進行蛇形搜索。魚雷蛇形搜索過程中,一旦判斷出目標機動,可及時將系統導引方法轉換為現在方位導引法,使魚雷按現在方位攻擊目標。
2.2 目標方位無效
在遠距離采用線導加被動聲自導魚雷對目標實施攻擊后,若目標采取降速措施對抗魚雷及艦殼聲納的探測,導致目標方位突然丟失或無效時,可人工控制將魚雷導向目標丟失前最后一個有效聲納方位的位置區域,為了擴大魚雷搜索范圍,提高魚雷捕獲目標概率,當魚雷直航一定距離使魚雷快速接近目標后,可適時轉換為蛇形彈道搜索。
3 蛇形彈道搜索控制模型
對于線導魚雷,其初始彈道通常采用修正方位導引法,航行一段時間后再適時轉換為現在方位導引法搜索目標。在線導魚雷搜索過程中,假設轉換為蛇形彈道搜索的初始時刻t1魚雷位于L(t1)點,此時以速度vl沿航向Cl(t1)航行,建立如下魚雷蛇形彈道搜索控制模型:
1)魚雷先向右以一定角速度ωl轉向一定角度β,轉向任意時刻魚雷位置為
除了作為技術人員要學習新的專業知識,最有挑戰性的是,項目領導直接把整個儲罐專業的日常運營管理工作也交給了我。這就是說,日常除了管技術還要帶團隊。由于我們的團隊人員結構特別復雜,100 多人的團隊,中方40 多人,其他60 人全是外方人員,具體包括印度人、巴基斯坦人、孟加拉人、阿富汗人,以及尼泊爾人。施工過程中,中方員工主導,起帶頭帶班作用,外籍人員輔助。
(1)
轉向結束時刻為
(2)
魚雷航向為
Cl(t2)=Cl(t1)+β.
(3)
2)轉向結束后魚雷直航一定時間T,直航任意時刻魚雷位置為
L(t)=L(t-1)+vleiCl(t2),
(4)
魚雷直航結束時刻為
t3=t2+T.
(5)
3)魚雷向反方向以一定角速度ωl轉向一定角度2β,轉向任意時刻魚雷位置為
(6)
轉向結束時刻為
(7)
魚雷航向為
Cl(t4)=Cl(t3)-2β.
(8)
4)轉向結束后魚雷直航一定時間2T,直航任意時刻魚雷位置為
L(t)=L(t-1)+vleiCl(t4),
(9)
則魚雷直航結束時刻為
t5=t4+2T.
(10)
5)反復執行步驟3、步驟4.
4 線導魚雷蛇形彈道搜索仿真分析
4.1 線導加尾流自導蛇形彈道搜索仿真分析
想定條件:假設目標方位060°,距離60 鏈,目標舷角0°,目標速度16 kn,魚雷速度36 kn,本艇航向060°,速度4 kn,魚雷速度均方誤差1 kn,魚雷航向均方誤差1.0°.魚雷轉向時曲線相對主搜索航向的最大切線角度為±35°,轉向角速度為5°/s,右或左循環轉舵的每個周期約26 s(轉向14 s,直航12 s)。
表1為不同方位誤差條件下,采用現在方位導引法和執行蛇形彈道搜索法對尾流的捕獲概率及進入角大于30°時的概率。通過分析可以看出:在誤差一定時,現在方位導引法捕獲尾流概率較低,由于尾流進入角非常小,可以認為仿真條件下現在方位導引法成功捕獲并進入尾流的概率為0;而采用蛇形彈道搜索法時,首先魚雷捕獲尾流概率明顯提高,其次如圖2所示魚雷進入尾流角也有明顯的改善,因此可以認為蛇形彈道搜索法成功捕獲并進入尾流的概率較現在方位導引法有明顯的提高。

表1 魚雷捕獲尾流及進入尾流角大于30°概率
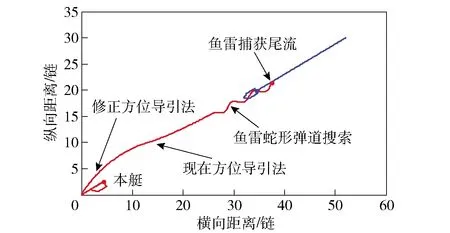
圖2 線導加尾流自導蛇形彈道搜索示意圖
圖3為魚雷航向隨時間的變化曲線圖,圖4為每10 s一個周期時的魚雷方位曲線圖,仿真假設目標方位060°,根據魚雷航向與魚雷方位的變化規律,當目標方位與魚雷方位基本一致,魚雷航向變化不大時,可控制魚雷進行蛇形彈道搜索。由于魚雷轉向時曲線相對主搜索航向的最大切線角度為±35°,當魚雷執行蛇形彈道搜索后航程損失大約為13.8%,以仿真采用魚雷速度36 kn計算,相當于損失約5 kn的速度。
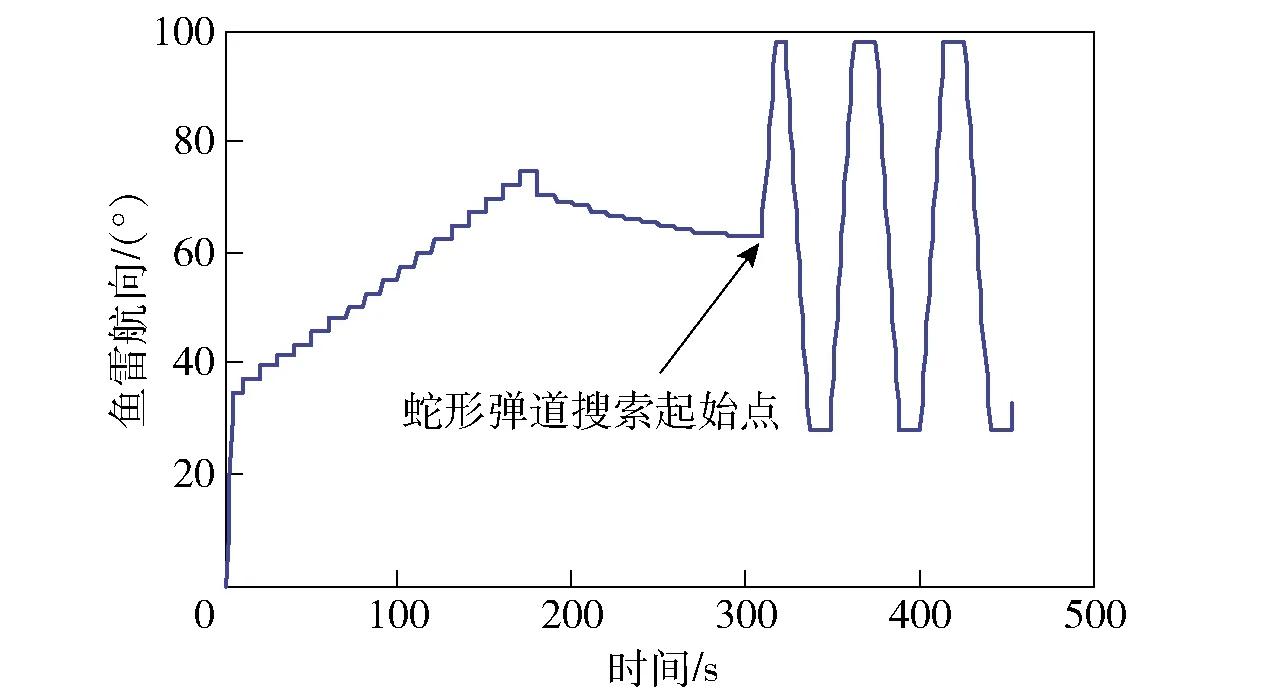
圖3 魚雷航向變化曲線圖

圖4 魚雷方位變化曲線圖
通過上述分析可以看出,蛇形彈道搜索在一定程度上可以提高魚雷捕獲尾流概率,但由于尾流自導魚雷攻擊時需要有準確的目標舷別,而采用蛇形彈道搜索法時無法預判魚雷進入尾流時的目標舷別,因此若自始至終一直使用尾流自導方式搜索攻擊目標,必然會有諸多的問題使魚雷不能成功命中目標。由于蛇形彈道搜索的特點決定了魚雷進入距離不會超過一個蛇形間隔,也就是當魚雷捕獲尾流時,魚雷離目標已經非常近了,且目標一定處于本艇和魚雷之間,相對位置關系比較確定。因此線導加尾流自導蛇形彈道搜索可更多地用來發現目標,而發現目標后的攻擊方式可采用聲自導方式。
假設目標出尾流時刻Tw位于L(Tw)點,航向Cl(Tw),關閉尾流自導、開啟聲自導并以速度vs、角速度ωs轉向,轉向任意時刻魚雷位置為
(11)
任意時刻魚雷航向為
Cl(t)=Cl(t-1)+ωs.
(12)
圖5為采用線導加尾流自導魚雷蛇形彈道搜索捕獲目標后,魚雷轉聲自導并向本艇方向轉向的示意圖。通過仿真發現,當魚雷捕獲尾流后轉聲自導攻擊目標,聲自導再次成功捕獲目標的概率接近100%.因此該方法在一定程度上保證了魚雷命中目標概率。

圖5 蛇形彈道搜索捕獲尾流后轉聲自導攻擊示意圖
4.2 線導加聲自導蛇形彈道搜索仿真分析
想定條件:假設目標初始方位055°,目標初始速度20 kn,目標采用降速措施規避魚雷(目標方位丟失時魚雷目標距離3 000 m),變速后目標速度12 kn,目標同時進行變向機動(變向角速度2/s,加速度-1 kn/s),方位均方誤差為1,魚雷航速均方誤差為1 kn.魚雷轉向時曲線相對主搜索航向的最大切線角度為±30°,轉向角速度為5°/s,右或左循環轉舵的每個周期約12 s(轉向12 s,直航0 s)。由于存在一定的距離誤差,當方位無效時,距離信息的不準確將導致人工導引魚雷向目標最后聲納方位直線航行時必然會產生一定的方位誤差,且該方位誤差直接影響魚雷航向,將此時的魚雷航向均方誤差稱為綜合航向均方誤差,其值為1°(2°或3°).
表2~表4為取不同綜合航向均方誤差、不同條件下直航搜索和直航加蛇形彈道搜索時的魚雷捕獲目標概率。圖6和圖7分別為魚雷直航搜索和直航加蛇形彈道搜索時捕獲目標示意圖。

表2 綜合航向均方誤差1°時魚雷捕獲目標概率
分析以上數據可以得出2點規律:1)相同條件下,直航加蛇形彈道搜索捕獲目標概率要高于直航搜索捕獲概率;2)由于距離誤差導致的人工導引魚雷向目標最后方位航行航向誤差越大時,直航搜索和直航加蛇形彈道搜索概率都有所減低,但直航加蛇形彈道搜索的整體效果也越好。
5 結論
本文對潛射線導魚雷蛇形彈道搜索進行了研究,對提出的蛇形彈道典型使用時機進行了仿真驗證。通過分析,得到以下結論:

表3 綜合航向均方誤差2°時魚雷捕獲目標概率

表4 綜合航向均方誤差3°時魚雷捕獲目標概率

圖6 魚雷直航搜索捕獲目標示意圖
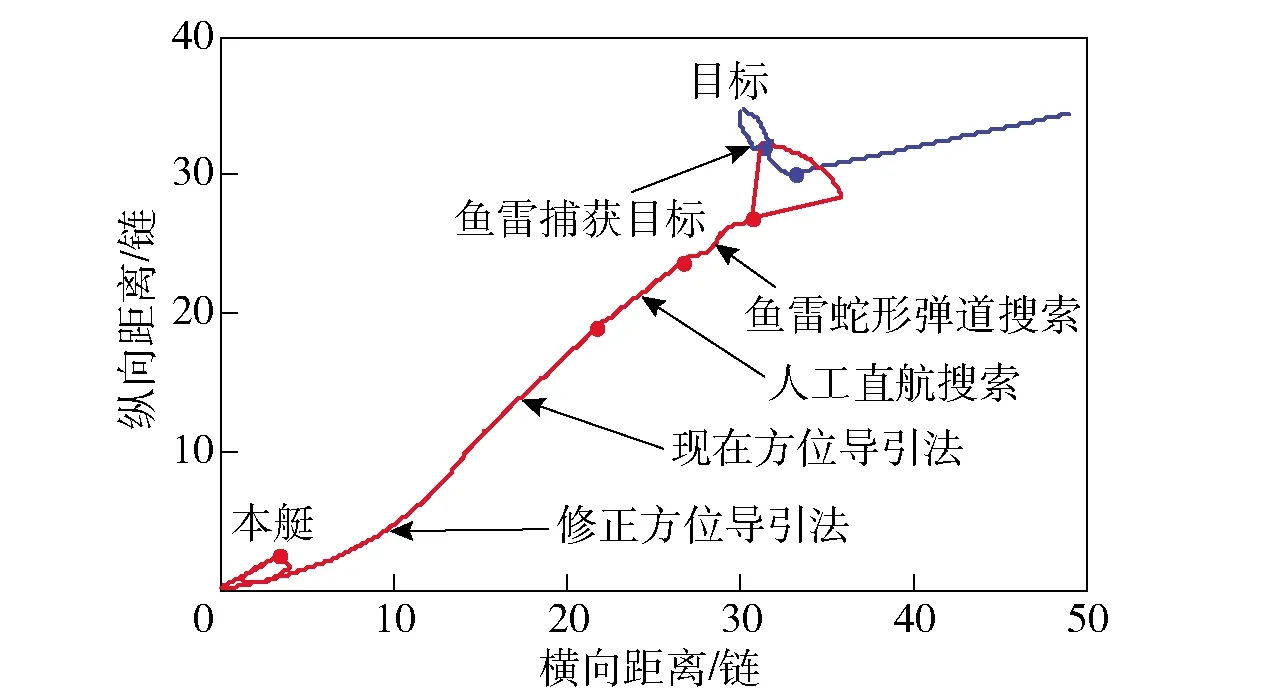
圖7 魚雷直航加蛇形彈道搜索時捕獲目標示意圖
1)當只有目標方位信息且目標舷角很小時(0°左右),可利用線導加尾流自導蛇形彈道搜索目標尾流,在一定程度上可以提高魚雷捕獲目標尾流概率。另外,提出的線導加尾流自導蛇形彈道搜索轉聲自導攻擊組合使用方法,可以有效解決線導加尾流自導蛇形彈道搜索目標尾流時目標舷別不確定所帶來的問題,可在魚雷捕獲到尾流后保證魚雷命中目標概率。
2)采用線導加被動聲自導對目標攻擊時,若方位無效,采用直航加蛇形彈道搜索捕獲目標可以有效擴大魚雷搜索范圍,其捕獲目標概率要高于直航搜索捕獲目標概率。
本文提出的潛射線導魚雷蛇形彈道搜索法可以為將來魚雷彈道設計提供一種新的思路與參考。對于魚雷的彈道控制,可通過優化彈道參數來提高魚雷搜索效能,在以后的工作中將進一步研究。