Boost變換器的雙閉環分數階PI控制研究
2020-02-14 06:10:36黃欽華高遠袁海英文家燕
廣西科技大學學報 2020年1期
黃欽華 高遠 袁海英 文家燕
摘要:為提高Boost變換器輸出電壓的控制性能和抗干擾性,提出一種電壓環和電流環均采用分數階比例積分(PI)控制器的雙閉環控制方法。該方法在建立的雙閉環分數階PI控制系統數學模型基礎上,結合控制系統頻域設計理論設計出電流環、電壓環的分數階PI控制器參數,并利用Bode圖分析了被控系統的穩定性和魯棒性。Boost變換器的雙閉環分數階PI控制仿真結果表明,即使在電源電壓、負載,以及期望輸出電壓的變化條件下,相比雙閉環整數階PI,以及電壓環分數階PI、電流環整數階PI的兩種控制情形,該方法能實現變換器具有更好的輸出電壓性能和控制魯棒性。
關鍵詞:Boost變換器;分數階:雙閉環;比例積分控制器:魯棒性
中圖分類號:TM46DOI:10.16375/j.cnki.cn45-1395/t.2020.01.002
0引言
Boost變換器是DC-DC變換器的一種重要類型,通過對其開關器件的通斷控制,可實現對直流電源的升壓變換輸出;在電動汽車、光伏發電系統等領域具有廣泛的應用前景Ⅲ。控制策略是實現DC-DC變換器高性能電壓輸出的重要保證。然而,DC-DC變換器固有的非線性和非最小相位特性,以及系統參數、外部電源和負載的時變性,會使得基于電壓單閉環控制的系統電壓輸出不能有效滿足高性能要求的應用工況。近年來,有學者提出了電壓和電流反饋的雙閉環控制策略,把對變換器電容電壓的控制問題轉化為對電感電流的控制問題,在一定程度上可降低系統非最小相位特性和時變干擾對控制性能的不良影響。如文獻[6]對Boost變換器采用雙閉環控制結構,設計一種基于電流模式的非線性控制器,不僅控制輸出電壓具有良好的動靜態性能,而且對電源輸入電壓的變化也有著較強的輸出控制魯棒性。
目前,DC-DC變換器大都采用整數階的控制方法。自本世紀以來,人們研究發現分數階控制相比傳統的整數階控制情形,被控系統具有更好的動態性能和魯棒性等特點,這極大促進了分數階理論在電機、飛行器等控制工程領域中的應用。在DC-DC變換器控制領域,基于電壓單閉環的分數階控制已有報道,且可獲得相比整數階控制更好的效果。為克服Boost變換器PIλDμ控制器的多控制參數(包含兩個分數階次參數)整定困難,文獻[10]通過定義控制性能指標函數,采用粒子群算法進行優化搜索獲取控制器參數,研究結果顯示PIλDμ控制能有效提高變換器的電壓輸出品質,以及降低系統參數變化對控制的不良影響。文獻[11]通過設計外部負載參數的自適應估計律,以及構建分數階PI滑模函數,推導出Boost變換器的自適應分數階滑模控制器,可使系統具有良好的電壓輸出瞬態響應和抗負載變化能力。
為提高Boost變換器的控制性能和魯棒性,鑒于系統雙閉環控制和分數階控制的優勢特點,提出一種電壓一電流雙閉環分數階比例積分(PI)控制方法,并根據建立的雙閉環分數階控制系統數學模型,采用頻域設計理論,通過分步混合式的設計過程,整定出電流環和電壓環的分數階PI控制器參數。Boost變換器的雙閉環分數階PI控制仿真對比結果驗證了所提出方法的有效性。
1Boost變換器雙閉環分數階控制系統的數學建模
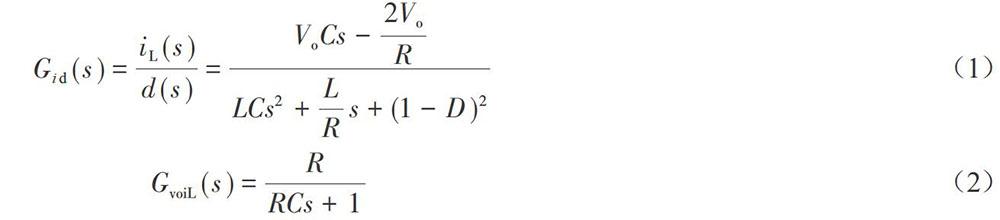
圖1為包括了Boost變換器的電壓、電流雙閉環分數階控制系統原理圖。圖1中,υo和iL分別為變換器實際的輸出電壓和電感電流,υref、iLref分別表示期望的輸出電壓和電感電流;電流控制誤差ei(t)=iLref-iL和電壓控制誤差eυ(t)=υref-υo,分別為電流環控制器和電壓環控制器的輸入信號,u(t)、iLref則分別是電流環控制器和電壓環控制器的輸出信號;d(t)為u(t)與三角波信號調制作用產生的脈沖寬度調制(PWM)信號,其體現為控制主電路開關器件S通斷變化的占空比。假定Boost變換器處電流連續工作模式,利用開關平均建模方法,可獲得如下形式的占空比-電流傳遞函數Gid(s)和電感電流一輸出電壓傳遞函數GvoiL(s)。
式中,D、Vo分別為Boost變換器在穩態工作情況下的占空比和輸出電壓,并有關系Vo=Vin/(1-D)。
圖2是Boost變換器雙閉環控制系統的數學模型框圖。圖2中Gc1(s)、Gc2(s)分別表示電流環分數階控制器和電壓環分數階控制器;Gm(s)=1/Vm是PWM調制器的傳遞函數,其中載波幅值Vm通常取值為1V。為實現高性能的輸出電壓控制,電流環和電壓環的分數階控制器設計是技術關鍵。
1.1雙閉環分數階PI控制器
本文為降低雙閉環分數階控制器的設計復雜性,電流環和電壓環均采用分數階PI控制器,控制器對應的數學表達式分別為
式中,kp1、kp2為控制器的比例控制參數,k11、k12為控制器的積分控制參數;λ1、λ2∈(0,1)表示分數階積分的階次參數。相比整數階PI控制器,分數階次參數引入使得控制器具有更好的控制靈活性,特別是當階次參數為1時,控制器將退變為傳統的整數階PI控制形式。上述的分數階PI控制器具有的頻率特性如下規律:
根據式(5),可進一步求出對應的相頻和幅頻特性數學表達式:
1.2雙閉環分數階PI控制系統的數學模型
根據圖2,結合式(1)、式(3)可求得電流環的閉環傳遞函數GiB(s):
利用式(8)和式(2)可求出電壓環被控對象的傳遞函數數學模型Gv(s):
Gv(s)=GiB(s)GvoiL(s)=
進一步可獲得Gv(s)的相頻特性和幅頻特性:
結合上述的系統數學模型,對電壓環和電流環的分數階PI控制器參數進行合理的綜合設計是實現變換器獲得優良控制性能的重要保證。
2雙閉環分數階PI控制器設計
由控制系統的頻域設計理論可知,對于被控系統G(s),當給定期望的截止頻率Wc相位裕度ψm,根據系統穩定性和魯棒性的要求,系統開環傳遞函數、Go(s)應滿足如下的頻域設計準則:
1)相位裕度準則
2)魯棒性準則
3)幅值準則
鑒于雙閉環的分數階PI控制器存在6個待設計參數,若直接從雙閉環分數階控制系統的數學模型出發,利用以上3個頻域設計準則,對控制器參數進行嚴格的解析求解較為困難。因此,為降低控制器參數綜合設計的復雜性,同時有別于現有基于智能搜索算法的多參數一步設計方法,本文采取如下具有分步混合特點的設計步驟對雙閉環分數階PI控制器的參數進行設計。
Step 1設計電流環整數階PI控制器
令式(3)中λ1=1,取超調量≤5%,阻尼比為0.707的性能要求,結合式(8),采用文獻[15]的仿真輔助設計方法,可設計出電流環整數階PI控制器的kP1和kI1參數,即有:
因此,在電流環整數階PI控制條件下,式(11)可簡化為:
進一步可求得Gv(s)的相頻特性和幅頻特性:
Step 2根據頻域設計準則,設計電壓環分數階PI控制器
選取期望的截止頻率ωc和相位裕度ωm,結合式(18)和式(6),分別根據相位裕度準則式(13)和魯棒性準則式(14),可求出如下λI2與λ2關系式:
結合式(19)和式(7),根據幅值準則(15)可得到關于KP2的數學表達式:可首先利用式(20)和式(21)繪制KI2-λ2曲線取交點的方法確定kI2與λ2,然后再根據式(22)求出kP2數值。對于λ2=1的電壓環整數階PI控制情形,可直接通過求解式(20)得到k12。
Step 3選擇恰當的分數階次參數λ1。,對電流環整數階PI控制器進行分數階化
以Step 1所得kP1和KI1參數作為電流環分數階PI控制器的比例和積分控制參數,結合電壓環開環傳遞函數的Bode圖,在保持控制穩定性條件下,以增強系統控制魯棒性為目的,選擇恰當的分數階次參數λ2,從而實現對電流環整數階PI控制器的分數階化。
3設計實例
以系統參數為Vin=60v,,L=2.5mH,C=440uF,R=120Q的Boost變換器為例,并假定變換器處于V0=120v,D=0.5的穩態工作情況。根據Step 1方法,可設計出電流環整數階PI控制器表達式:
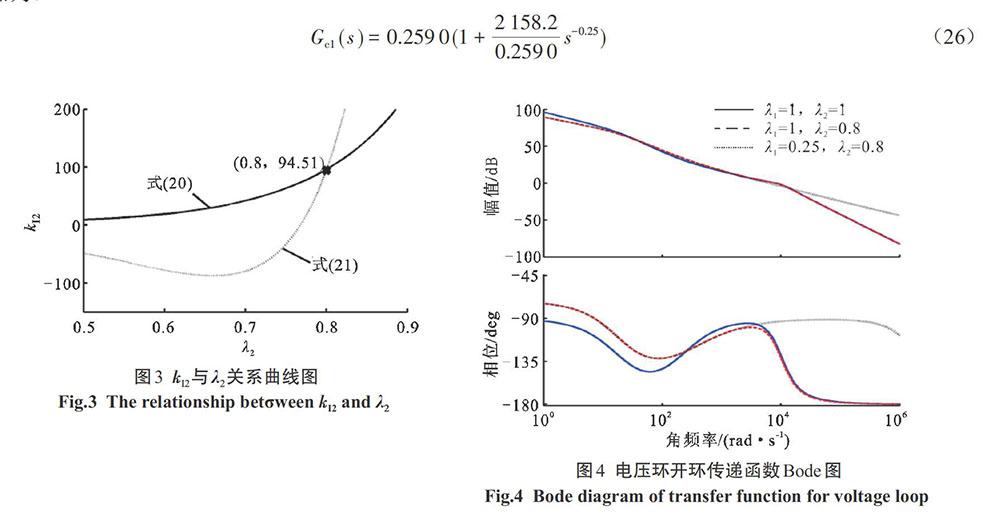
根據Step 2過程,選擇ωc=8300rad/s、ψm=π/3,由式(20)和式(21)繪制出如圖3所示的KI2-λ2的關系曲線圖,并由該圖交點確定kI2=94.51、λ2=0.8后,再根據式(22)可求出kp2=2.6528.因此,所設計的電壓環分數階PI控制器為:
Gc2(s)=2.6528(1+94.51s-0.8) (24)
當λ2=1時,根據式(20)和式(22)可直接設計得到電壓環整數階PI控制器:
Gc2(s)=2.7114(1+543.5226-1) (25)
依照Step 3的控制器分數階化方法,選取電流環控制器的分數階次參數λ1=0.25,繪制如圖4所示的電壓環開環傳遞函數的Bode圖。由圖4可見,Boost變換器雙閉環分數階PI控制(λ1=0.25,λ2=0.8),相比傳統的雙閉環整數階PI控制(λ1=1,λ2=1),以及電流環整數階PI、電壓環分數階PI的控制情形(λ1=1,λ2=0.8),對應的截止頻率ωc和相位裕度ψm均符合設計要求,且相位曲線在截止頻率的平坦范圍變寬,這表明λ1=0.25時,可使得雙閉環分數階PI控制系統具有更強的控制魯棒性。因此,可設計分數階電流環PI控制器為:
4控制仿真結果及分析
在MATLAB/Simulink環境下,搭建Boost變換器的雙閉環分數階PI控制系統仿真模型,其中分數階積分數值運算采用Oustaloup濾波算法實現。設置仿真模型的PWM工作頻率為40kHz,電源輸入電壓Vin=60v,負載電阻R=120Ω,期望輸出電壓Vref=120v。
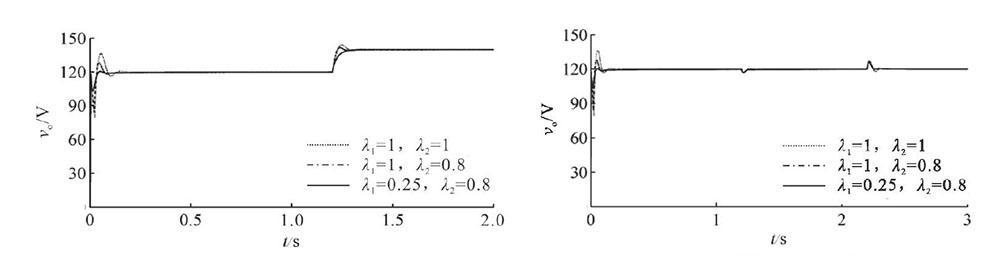
為驗證所提控制方法的有效性和先進性,仿真過程中分別考慮了變換器系統期望輸出電壓、電源電壓和負載電阻的變化運行情況,同時還對比系統雙閉環整數階PI,以及電流環整數階PI、電壓環分數階PI的控制仿真結果。圖5示出了調壓情況下(Vref在1.2s時刻由120v跳變至140v)Boost變換器的輸出電壓響應曲線。圖6是負載電阻跳變情況下(R在1.2s時刻由120Ω跳變至100Ω,2.2s時刻再由100Ω跳變至150Ω)的輸出電壓圖。圖7給出了電源電壓變化時(Vin在1.2s時刻由60v跳變至70v,2.2s時刻再由70v跳變至50v)的輸出電壓變化情況。
由圖5-圖7看出,即使在期望輸出電壓、電源電壓和負載電阻的變化情況下,相比雙閉環整數階PI,以及電流環整數階PI、電壓環分數階PI的控制情形,雙閉環分數階PI控制方法能使得Boost變換器的輸出電壓具有較快的控制響應速度、更好的對期望輸出電壓穩定跟蹤控制性能,以及抗電源輸入電壓和外部負載的變化干擾能力。
5結語
針對Boost變換器控制問題,本文提出一種電流環、電壓環的雙閉環分數階PI控制方法,并建立Boost變換器雙閉環分數階PI控制系統數學模型。將數學模型與頻域設計理論相結合,提出采用一種分步混合式方法設計出電流環和電壓環的分數階PI控制器參數。該參數設計方法有別于現有基于智能優化搜索算法的一步設計‘方法,不需要計算機大量運算;同時可兼顧參數設計的解析性,以及可降低多閉環系統控制參數綜合設計過程的復雜性。Boost變換器雙閉環分數階控制系統的控制仿真對比結果表明,本文所提出的雙閉環分數階PI控制方法具有更優的期望輸出電壓跟蹤控制性能和魯棒性。此外,分數階PI控制器與整數階PI控制器的實現結構類似,且分數階積分環節可采用逼近的數字濾波器技術實現。因此,研究結果為探索DC-DC變換器高性能的控制策略,提供了有用的控制理論方法參考。