微電網中主電源逆變器控制算法
2020-02-01 03:24:38劉國聯
電子技術與軟件工程 2020年9期
劉國聯
(湖南鐵路科技職業技術學院 湖南省株洲市 412000)
近年來,我國微電網發展迅速,在多個地區鋪設,成為人們日常生活和工作不可缺少的一部分[1]。為了保證微電網得以長期穩定運行,構建儲能系統是當前重點開展工作。主電源是儲能系統的核心,電源逆變器在很大程度上決定了供電質量[2-3]。以往提出的主電源逆變器控制算法不滿足獨立控制要求,電壓控制偏差較大。為了彌補傳統控制算法存在的不足,本文引入電流內環雙閉環、電壓外環控制方法,提出新的算法研究。
1 微電網中主電源逆變器拓撲結構
離網型三相逆變器在微電網供電中應用較多,本文選擇該設備作為研究對象,依據拓撲結構及工作原理,提出控制算法。逆變器電感、電阻等零件采用星形連接方式組建而成。其中,L 代表逆變器的交流側電感,L0代表逆變器的負載側電感,兩者對應的寄生電阻依次為R、R0。假設此類型逆變器在作業過程中三相負載皆處于平衡狀態,將輸出電流數值作為逆變器的擾動輸入參數數值,能夠生成關于交流側電壓的傳遞函數,利用此函數可以得出逆變器作業期間的諧振狀態信息。
2 主電源逆變器控制算法
2.1 雙閉環控制結構框架設計
本文針對離網型逆變器控制需求,將電流內環雙閉環、電壓外環控制方法植入逆變器控制體系中,形成雙閉環控制結構,其框架設計方案如圖1所示。
圖1 中,逆變器雙閉環控制結構由外環控制器、內環控制器、控制對象3 部分組成,本系統的雙閉環體現在外環控制結構和內環控制結構兩個方面。
2.2 電感電流反饋內環控制
本文提出的雙閉環控制結構中,利用電壓外環控制逆變器的輸出電壓,該控制體系不支持電流直接控制。為了實現電流直接控制,本控制體系增加了電感電流反饋內環控制結構,成為了雙閉環控制結構。離網型逆變器作業期間濾波器諧振現象較為頻繁,通過布設內環控制體系,可以很好的抑制諧振。關于內環控制的傳遞函數為:

公式(1)中,s 代表拉普拉斯運算符。按照公式(1)中的內環控制關系,計算諧振頻率和阻尼系數,分別為。
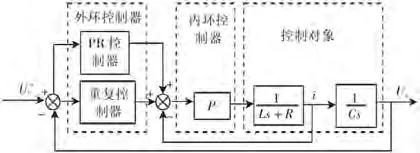
圖1:雙閉環控制結構框架設計
在原有逆變器控制體系結構基礎上,添加內環控制模塊以后,電感寄生電阻中加入了新的電阻P,使得逆變器系統阻尼系數得以增加,相比于改變前,運行穩定性更強。
2.3 復合控制電壓外環函數
本文提出的電壓外環控制模塊是一種復合結構,支持重復控制,在閉環重復控制體系中,能夠根據逆變器所處作業環境情況,做出實時調控方案,以此消除特殊情況下電壓偏差,使得逆變器控制精準度更高。
“糧食銀行”破解了農民儲糧、賣糧難題,也減輕了運營主體的資金壓力。原糧供應多了,對企業來說糧源也穩定了。
重復控制技術建立在內模控制基礎上,通過擾動處理,重復多次對信號進行修正,使得輸出信號得以更加準確的還原。在本文研究的主電源逆變器控制算法中,重復控制技術用于消除控制體系中生成的非線性負載擾動信號,使得輸出電壓波形與實際波形更加貼合。
本文提出的重復控制器分為前饋和反饋兩部分,借助低通濾波器減弱高頻積分,通過合理設置比例闡述,以此有效限定系統積分,提高系統運行穩定性,使其更加有效地控制逆變器,實現主電源靈活控制。以下為重復控制技術下的電壓外環函數:
公式(2)中,τ 代表低通濾波器作業時間;K 代表控制結構的比例常數;T 代表主電網基波周期;Kf代表控制結構反饋和前饋系統。
為了實現零誤差信號跟蹤,提高諧振點增益,本文在公式(2)函數基礎上,采取“無靜差”處理方法,以提高信號跟蹤精準度。目前,“無靜差”處理方法較為成熟,此處不做過多介紹,得到重復控制傳遞函數:

公式(3)中,Kp代表控制結構比例常數;ω 代表基波角頻率;Ki代表積分常數;ωc代表截止頻率。
與未改變前,PR 控制器對系統增加帶寬幫助較大。當微電網作業頻率發生小幅度變化時,本文提出的逆變器控制系統不會發生較大變化。
3 主電源逆變器控制函數詳細設計
3.1 內環控制與復合控制函數
依據前文提出的內環控制函數和復合控制函數,設計開環傳遞函數:

對應的閉環函數為:

通過求取特征方程,按照勞斯判據,得到各個參數之間的關系。按照此關系確定主電源逆變器參數。本文以P、Ki、ωc、Kp依次為2.49、10、15、0.039 這組數據為例,分析閉環傳遞函數零極點分布情況。根據函數點分布情況可知,所有點均分布在圓內部。因此,本文提出控制函數運行得到的數據較為穩定,符合逆變器控制需求。
3.2 重復控制傳遞函數及控制條件
另外,本文提出的改進算法還增加了重復控制模塊,包括反饋環節和前饋環節。關于控制函數功能的實現,以Kf、τ、K3 個參數為主要設計參數,根據控制需求擬定設置方案。
(1)τ 參數的設置。該參數值的設定與低通濾波器作業效果密切相關,通過限定此數值,削弱高頻積分。考慮到低通濾波器截止頻率參數值不得高于電路高頻諧振點數值,本文研究的三相逆變器中低通濾波器中此參數的最小值為500Hz,依據各項參數之間的關系,取時間數值τ 數值為3.18×10-4。
(2)Kf參數的設置。該參數的設置與系統諧振波動性能密切相關,依據反饋和前饋兩個環節控制器連接方式,分析諧振頻率及峰值變化情況。當系統加入內環控制模塊后,產生的諧振波形將隨之發生變化。當Kf數值減小時,系統頻率波動適應性逐漸增強。所以,根據系統抗諧振波動需求,即諧振帶寬和增益參數數值控制范圍需求,合理設置Kf數值。
(3)K 參數的設置。該項參數的設置與控制器累加處理功能密切相關,當系統穩定性提高時,系統靜差就會隨之增加,如何控制二者之間的關系成為了算法研究的關鍵。通常情況下,K 參數取值不得高于1,在滿足系統運行穩定條件下,調整K 數值,要求該數值為基波頻率的整數倍。對于本文研究的逆變器重復控制體系,此參數的設置等效于系統諧振,為了保證系統運行穩定性,綜合考慮內環控制要求和外環控制要求,設計開環控制函數:

依據小增益定理,分析公式(6)不等關系,得出一個關于K參數值的不等式:

綜合考慮公式(6)和公式(7)關系,得出系統得以穩定運行的充分條件:

4 測試分析
4.1 測試內容
本文選取PR 控制器應用下的閉環控制算法作為對照組,本文提出的改進控制算法為實驗組,通過對比兩種算法在模擬應用中的電壓偏差、電壓諧波抑制情況得出相應結論。
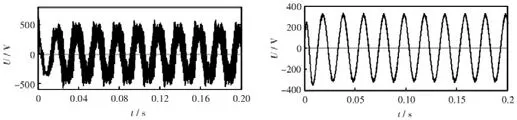
圖2:電流內環控制應用前后電壓波形對比結果
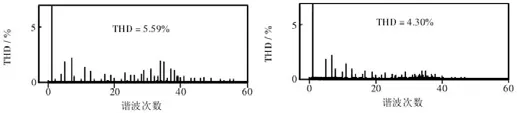
圖3:重復控制下的外環控制電壓諧波失真對比結果
4.2 測試結果分析
按照測試內容要求,本研究對PR 控制器閉環控制算法和本文提出改進算法應用下的逆變器輸出電壓偏差進行測試。
測量時間為0.3s ~0.45s 范圍時,對照組和實驗組的電壓偏差較大,其他時間產生的電壓偏差較小,實驗組應用的控制算法優勢顯著。因此,本文提出的改進控制算法得到的輸出電壓偏差更小,達到了改善傳統控制算法的目的。
另外,本文分別對改進控制算法的兩個閉環控制體系作用進行測試,結果如圖2 和圖3所示。
圖2 中,左側圖為未使用電流內環控制的電壓波形,右側圖為使用電流內環控制的電壓波形。對比左側圖和右側圖可知,改進算法中的電流內環控制體系的應用,能夠有效控控制電壓,使其按照微電網供電需求,對逆變器進行有效操控。
圖3 中,左側圖為未使用外環控制的電壓諧波測試結果,右側圖為使用外環控制的電壓諧波測試結果。對比左側圖和右側圖可知,改進算法中的外環重復控制能夠起到抑制諧波失真的作用,較未使用時降低了2.29%干擾率。
5 總結
本文圍繞微電網中主電源逆變器控制問題展開研究,通過分析傳統控制算法應用中存在的問題,引入雙閉環控制思路,提出改進算法。此算法主要由電感電流反饋內環控制函數、復合控制電壓外環函數兩部分組成,分別起到降低電壓偏差和抑制諧波作用。測試結果表明,本文提出的改進算法不僅可以有效降低電壓偏差幅度,而且還能夠抑制電壓諧波,避免電壓諧波失真,影響逆變器控制效果。