傳感器在爐管泄漏檢測互相關算法中的影響
2020-01-19 05:41:26彭小蘭1劉志強2黃霄2
聲學技術 2019年6期
彭小蘭1,劉志強2,黃霄2
傳感器在爐管泄漏檢測互相關算法中的影響
彭小蘭1,劉志強2,黃霄2
(1. 湖南省特種設備檢驗檢測研究院,湖南長沙 410111;2. 中南大學能源與動力工程學院,湖南長沙 410083)
將互相關算法應用于爐管泄漏定位中,搭建了一套基于時延測量的爐管泄漏檢測系統。時延值是通過傳感器相位差計算出來的,傳感器的初始相位差以及節點位置都會影響檢測結果。實驗結果表明:(1) 基于互相關算法的鍋爐管泄漏定位系統中的4個傳感器的初始相位需要進行一致性匹配;(2) 對子脈沖信號,時延測量不受傳感器之間距離的影響;但是對周期性信號,只有在傳感器間距對應的時延小于半周期時,互相關算法才能準確計算出時延值;(3) 傳感器尺寸小于50 mm時,采用互相關算法測量時延才準確。
泄漏;互相關算法;時延值;傳感器;相位差
0 引言
國外早期的鍋爐泄漏檢測系統體積龐大,結構復雜,調試繁瑣,且檢測精度、運行可靠性、報警準確率都較差,并且不能進行泄漏的定位[1-3]。近年來,爐管在線泄漏監測裝置依靠密集的傳感器布置以感知泄漏噪聲進行區域性定位,仍存在施工復雜、成本高、定位難的局限性[4-6]。本文設計搭建了一套基于互相關算法的爐管泄漏判定與定位的實驗系統。在鍋爐管泄漏定位領域,對比互相關算法、波束形成法[6]和高分辨率譜估計法[7-8]三種計算方法,用互相關算法來計算時延值時,需要的傳感器最少,定位最精準,現場最為適用。時延值為不同位置傳感器接收到某一時刻聲源的時間差,結合傳感器位置、聲速即可對聲源位置進行求解。因為時延值的獲取是通過相位角的差值來計算得到的,所以定位中最關鍵、最重要的一個設備是傳感器,而在互相關算法中最重要的參數就是傳感器的初始相位、相位差及位置。本文具體分析了這三個因素對定位的影響。
1 互相關算法



式中:為樣本信號的時間長度。
2 實驗系統
為了驗證互相關算法是否能準確定位并研究影響定位的因素,本文設計并搭建了一套聲學定位系統。系統硬件主要有聲學傳感器、高速數據采集卡、SMB線纜、ICP供電器、便攜式工控機。設備選型時聲學傳感器4個為一組,高速數據采集卡需達到20 kHz以上的采樣率并且各通道同步采樣,同步傳輸數據。SMB線纜接口接觸良好、穩定。滿足以上選型要求的設備是正確采集時延值的基礎;系統軟件包括數據采集控制界面,用于調節采樣率及采樣點數。基于MATLAB的互相關程序,對兩路信號進行相關分析,自動計算時延值;定位程序,給出聲源坐標。實驗平臺硬件系統的結構圖如圖1所示。
3 傳感器在實驗中的影響及分析
傳感器陣列引入了聲源的位置信息,同一聲音到達不同位置傳感器的時間(相位)不同,結合傳感器之間的幾何位置,理論上可以解出聲源坐標。陣列中傳感器的位置決定了其特點,目前有均勻直線陣列、均勻圓陣列和四面體陣列。以四面體陣列為代表的空間陣列相較于平面陣列的最大優勢在于無定位盲區,且不僅能對聲源實現方位估計,更能實現精確到坐標點的位置估計。四面體陣有正四面體陣、直角四面體陣、不規則四面體陣三種,從便于安裝、設置傳感器及定位算法復雜度考慮,選擇直角四面體陣列,如圖2所示。得到時延值后,聲源就處于以這對傳感器所處的位置為焦點、時延值所對應的聲音傳輸距離為參數的雙曲面上。使用多對傳感器得到多個時延值,從而得到多個雙曲面。由于陣列形式和隨機誤差的影響,多個雙曲面的交點可能是空集,采用最優化的思想進行求解。
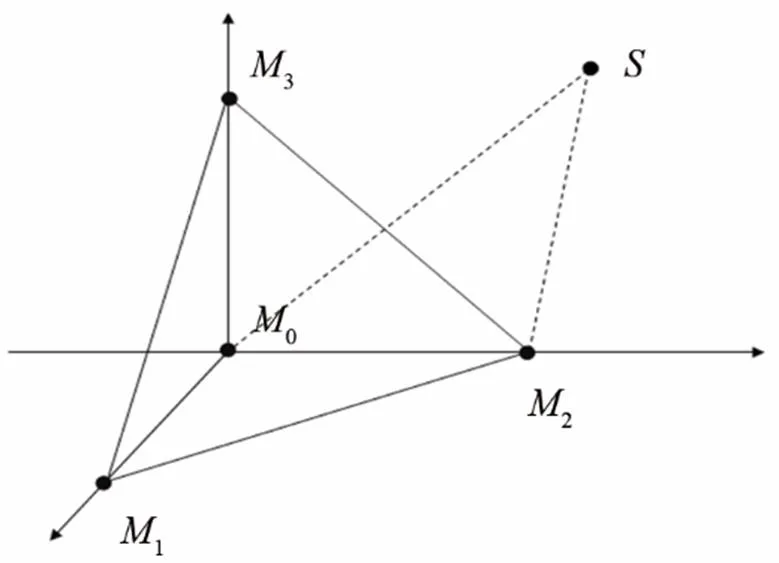
圖2 直角四面體陣列(Mi表示傳感器,S表示聲源)
在自由場條件下,不考慮傳聲器對聲場影響,得到的定位方程如下:

本文采用自由場聲音傳感器,它測量到的是消除了傳感器對聲場影響的聲壓,其基本性能參數如表1所示。

表1 傳感器性能參數
3.1 傳感器初始相位匹配
為了驗證聲音傳感器的相位是否匹配,將聲源置于空間一點,通過改變傳感器之間的距離,觀察其相位差變化。共做3組實驗,將頻率統一設置為10 kHz,聲速為340 m·s-1。第1組,傳感器的間距為0.3 m;第2組,傳感器的間距為1.0 m;第3組,傳感器的間距為2.0 m,其時延值如表2所示。

表2 不同傳感器間距的初始相位差
由表2可知,傳感器初始相位差的實驗結果與理論值的誤差在4% 范圍內,認為實驗平臺所采用的聲音傳感器相位匹配度較好,可以進行下一步的實驗。
3.2 傳感器之間相位差的影響
不論采用何種陣列形式和定位算法,都需要多個傳感器對同一段聲音進行精確采樣。這要求對聲音進行同步采集,即使用同一個采樣脈沖序列對多個傳感器獲取的聲音信號進行量化。1924年,奈奎斯特就提出當采樣頻率大于信號中最高頻率的2倍時,釆樣之后的數字信號會完整地保留原始信號的信息。人耳的聽力極限是44.1 kHz,根據奈奎斯特采樣定理,采樣率只要達到100 kHz,采集到的聲音就不會失真。相鄰陣元之間利用互相關算法獲取時延的過程中,其準確程度與聲源頻率以及聲音傳感器之間的相對距離有關。
3.2.1 相位差對脈沖信號的影響
對于頻率為2 500~3 000 Hz的脈沖信號用信號發生器生成單個脈沖信號,再用互相關函數進行分析、處理,脈沖信號及其互相關波形如圖3所示。
由圖4可以看出,當聲源為脈沖信號時,用互相關算法計算時延值很準確;無論相位差增大或減小,都不會對時延值結果產生影響。這是因為脈沖信號,可以認定為周期無限長的周期函數或者采樣頻率無限大的周期函數,所以不會對時延值產生影響。
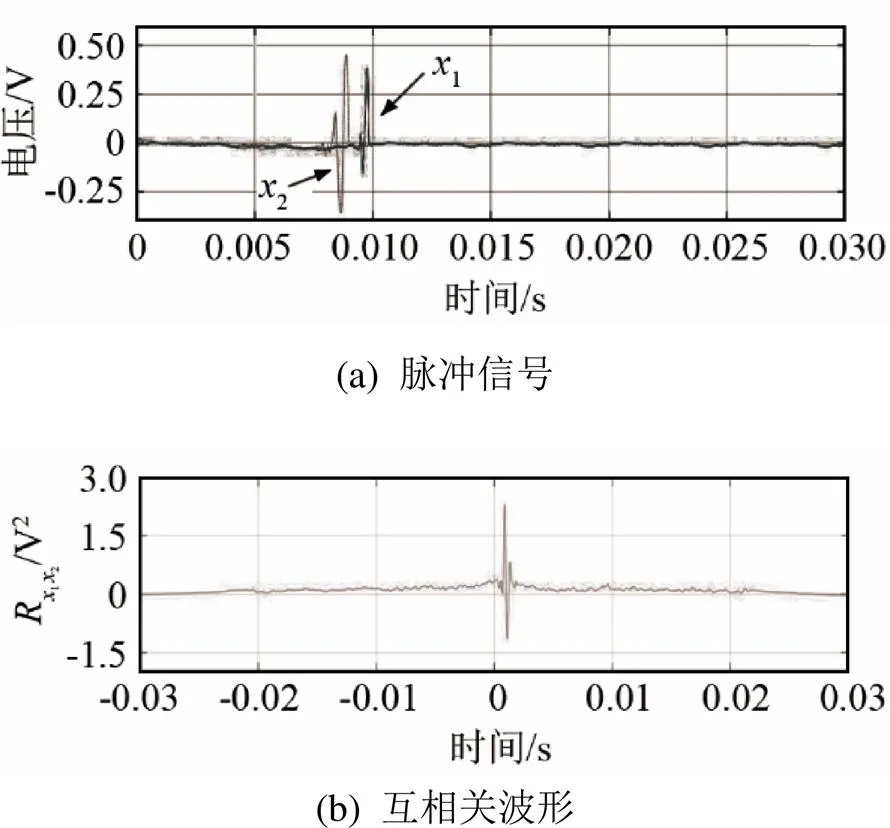
圖3 脈沖信號及其互相關波形
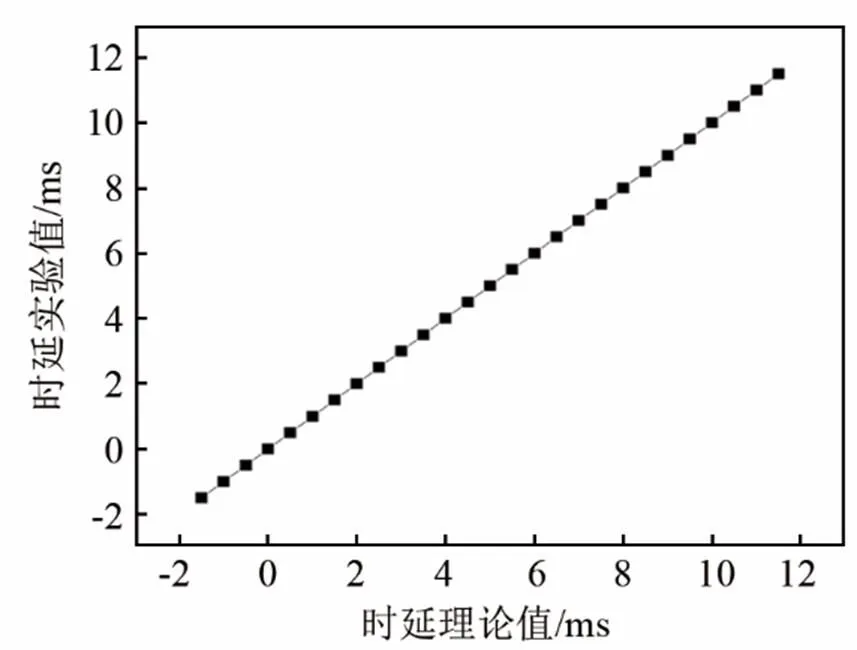
圖4 脈沖信號時延計算和實驗結果比較
3.2.2 相位差對連續周期信號的影響
信號發生器生成頻率為2 500~3 000 Hz的連續周期信號,用互相關函數進行分析、處理,得到的結果如圖5所示。
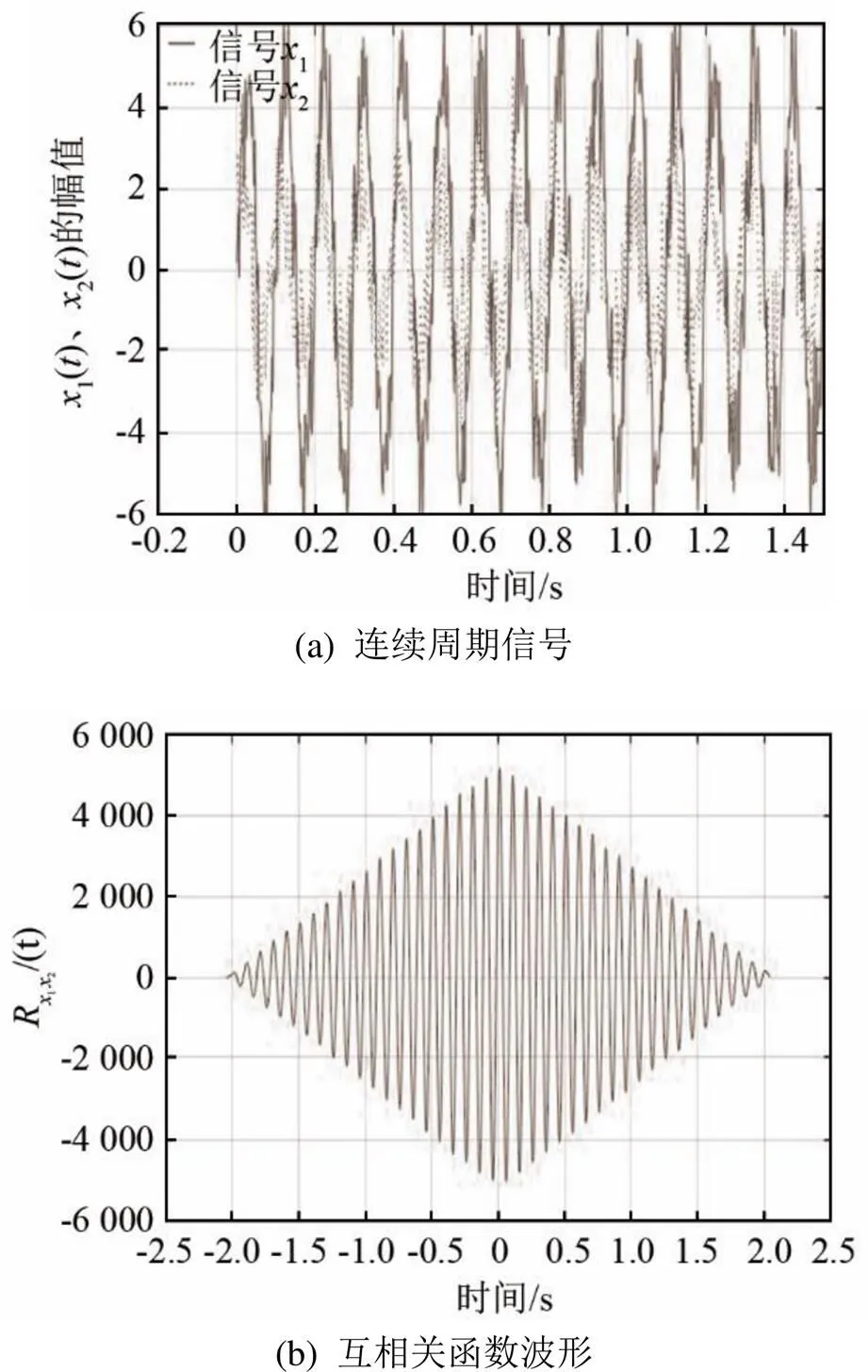
圖5 連續周期信號及其互相關波形
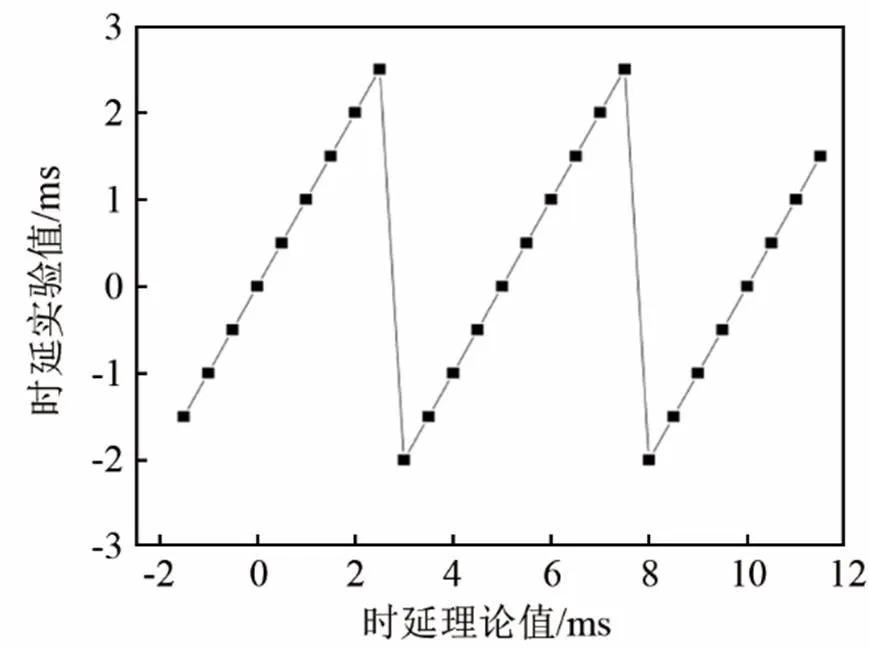
圖6 連續周期信號時延計算和實驗結果比較
令:



表3 互相關算法的時延計算結果
以上的數據與圖像表明:
(1) 在<50時,互相關函數峰值明顯,時延點數計算準確。
可得出結論:互相關算法只有對延遲時間小于一個信號周期的兩路信號進行時延估計才是準確的,否則將出現互相關峰重疊問題。另一方面,在傳感器之間相對位置已經固定的情況下,聲源的頻率越低,獲取的時延值越準確;當環境有噪聲存在時可以先進行帶通濾波再做互相關運算,從而保證定位精度。在聲源頻率固定的情況下,傳感器之間的距離不能大于聲源信號的波長,在實驗中常設置為不能大于聲源信號的半波長。
3.3 傳感器陣列尺寸校準
從定位方程式(4)可以看出,定位結果還受傳感器陣列尺寸的影響。通過在程序中增加傳感器陣列尺寸的數值,計算定位結果的誤差變化,如圖7所示。
結果表明:在不考慮其他誤差的情況下,傳感器陣列尺寸的測量誤差越大,定位結果的誤差也越大。當傳感器陣列尺寸的測量誤差在1%~10%區間變化時,定位結果、、方向的誤差分別由2.5%、2%、3.2%增大到16.5%、13.3%、19.2%。
因此,實驗時有必要對聲音傳感器實際位置進行校正。首先在測試區域內某已知點發聲,記錄測點位置。接著調整定位程序中傳感器間距的大小,調整范圍不超過±50 mm,直到輸出的定位結果與實際測點位置良好匹配。記錄此時陣列間距,即為校準后的實際傳感器間距。為保證傳感器陣列尺寸的準確性,可以采取多個已知點進行校準。
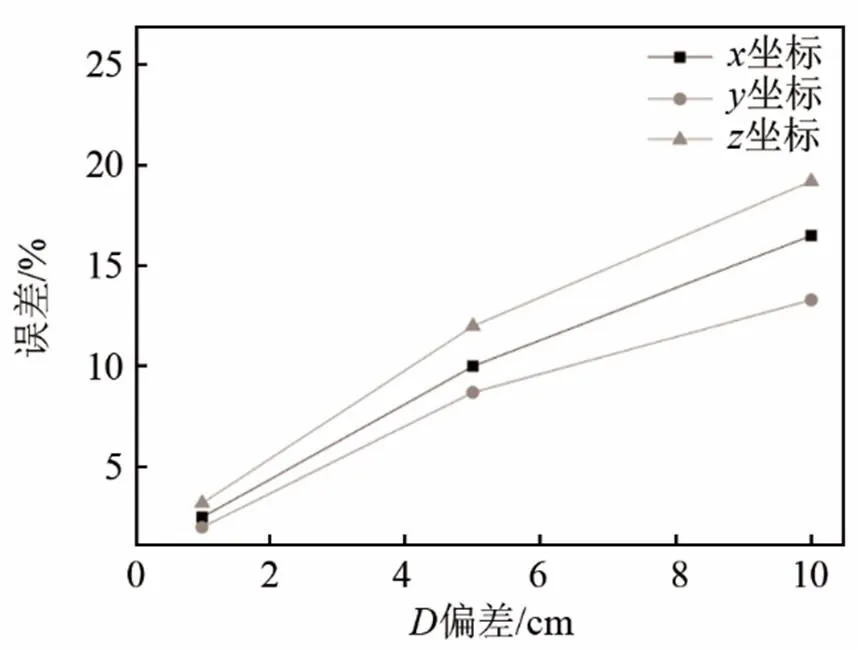
圖7 傳感器陣列尺寸D的測量誤差對定位結果的影響
4 結論
(1) 為保證基于互相關算法的鍋爐管泄漏定位系統時延測量結果的準確性,實驗中的4個傳感器需要進行初始相位的一致性匹配和校準;
(2) 分析互相關算法求取時延值的適用對象:針對脈沖信號,互相關算法的峰值明顯,計算結果與理論結果吻合較好;針對連續周期信號,互相關算法沒有明顯的峰值,計算結果呈現出一個周期性的變化規律,可以表示為(為整數),與理論結果相差整數倍/2。
(3) 陣列尺寸的測量誤差對定位結果的影響:陣列尺寸校準前后,定位結果會發生很大改變,陣列尺寸校準后,定位結果的準確度會有很大提升。傳感器作為質點對象研究,只有傳感器陣列尺寸小于50 mm時,基于時延的互相關算法才準確。因此,進行聲源定位時,需要對陣列尺寸進行校準。
[1] NARAYANANV N H, VISWANAD-HAM N. A methodology for knowledge aequisition and reasoning in failure analysis of systems[J]. IEEE Trans. Systems Man Cyberneties, 1987, 17(3): 274-288.
[2] ZHANG Y, LIANG F, SU F. A fuzzy production rule expert system[J]. Fuzzy Sets and Systems, 1991, 44(3): 291-310.
[3] LUO R, MISRA M, HIMMELBLAU D. Sensor fault detection via multiscale analysis and dynamic[J]. PCA. Ind. Eng. Chem. Res. 1999, 38(4): 1489-1495.
[4] BRANDSTEIN M S, SILVERMAN H F. A practical methodology for speech source localization with microphone arrays[J]. Computer, Speech and Language, 1997, 2(11): 91-126.
[5] 楊衛娟, 周俊虎. 鍋爐管道泄漏知識及應用現狀[J]. 動力工程, 2000, 20(6): 937-940.
YANG Weijuan, ZHOU Junhu. Knowledge and application status of boiler pipe leakage[J]. Power Engineering, 2000, 20(6): 937-940.
[6] 安連鎖, 馮強, 沈國清, 等. 電站鍋爐管陣列內聲傳播特性及時延值測量[J]. 動力工程, 2017, 30(1): 937-940.
AN Liansuo, FENG Qiang, SHEN Guoqing, et al. Acoustic propagation characteristics and time delay measurement in power station boiler tube array[J]. Power Engineering, 2017, 30(1): 937-940.
[7] 呂勇興. 鍋爐“四管”泄漏監測系統的研究[D]. 北京: 華北電力大學, 2011.
LYU Yongxing. Research on boiler "four-tube" leakage monitoring system[D]. Beijing: North China Electric Power University, 2011.
[8] 張成輝. 鍋爐爐管泄漏檢測系統的研究[D]. 沈陽: 沈陽航空航天大學, 2012.
ZHANG Chenghui. Research on boiler tube leak detection system[D]. Shenyang: Shenyang Aerospace University, 2012.
[9] MUNGAMURU B, AARABI P. Enhanced sound localization systemss[J]. IEEE Transactions on., 2004, 34(3): 1526-1540.
[10] NISHIURA T, YAMAD T. Localization of multiple sound sources based on a CSP aanalysis with a microphone array[C]//Acoustics, Speech, and Signal Processing, 2000. ICASSP00. Proceedings 2000 IEEE International Conference on 2000, 2: 1053-1056.
[11] 王琳. 爐內管道泄漏聲檢測與定位系統的研究現狀[J]. 聲學學報, 2010, 29(1): 1-10.
WANG Lin. Research status of sounding and positioning system for furnace pipeline leakage[J]. Acta Acoustics, 2010, 29(1): 1-10.
The influence of sensors on the cross-correlation algorithm for furnace tube leak detection
PENG Xiao-lan1, LIU Zhi-qiang2, HUANG Xiao2
(1. Hunan Special Equipment Inspection & Testing Institute, Changsha 410111, Hunan, China; 2. School of Energy and Power Engineering, Central South University, Changsha 410083, Hunan, China)
The cross-correlation algorithm is applied to locating furnace tube leak, and a set of time delay measurement based furnace tube leak detection system is built. The time delay value is calculated by the phase difference. The initial phase difference and the placed position of the sensor will affect the detection result. Experiments show that: 1. the initial phase differences of the four sensors in the cross correlation algorithm based tube leak location system require consistency matching; 2. for impulse signal, the time delay measurement is independent of the sensor spacing, however, for periodic signal, only if the time delay corresponding to the sensor spacing is within half a period, the cross-correlation algorithm can accurately calculate the time delay value; 3. only when the sensor size is less than 50mm, the time delay measurement by cross-correlation algorithm is accurate.
leakage; cross-correlation algorithm; time delay value; sensor; phase difference
TP31
A
1000-3630(2019)-06-0705-05
10.16300/j.cnki.1000-3630.2019.06.018
2018-04-28;
2018-09-09
質檢公益性行業專項項目(201510067)、國家自然科學基金(51376198)資助
彭小蘭(1979-), 女, 湖南長沙人, 博士, 教授級高級工程師, 研究方向為爐管泄漏檢測。
黃霄,E-mail: 463746420@qq.com
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00