面向智能裝配的航天復(fù)雜產(chǎn)品結(jié)構(gòu)設(shè)計標(biāo)準(zhǔn)研究*
2020-01-17 03:19:08劉峰蔡志娟李霏孫朝暉張金胡敏王勝
航天標(biāo)準(zhǔn)化 2019年4期
劉峰 蔡志娟 李霏 孫朝暉 張金 胡敏 王勝
(北京電子工程總體研究所,北京,100854)
近年來,國際形勢變化劇烈,國家對航天復(fù)雜產(chǎn)品的要求,包括產(chǎn)品性能與生產(chǎn)效率越來越高,但是目前航天復(fù)雜產(chǎn)品生產(chǎn)仍在采用依靠人工裝配為主的生產(chǎn)模式,在型號批產(chǎn)數(shù)量越來越多的情況下,各生產(chǎn)廠、總裝廠面臨的生產(chǎn)壓力極大,產(chǎn)品質(zhì)量也越來越難以把控,更談不上能夠滿足戰(zhàn)時航天復(fù)雜產(chǎn)品的大量需求。目前裝配生產(chǎn)模式中存在的問題,以及對產(chǎn)品高質(zhì)量、高效率的追求,對生產(chǎn)模式轉(zhuǎn)變、制造技術(shù)革新兩方面都提出了變革和跨越式的發(fā)展要求,智能化創(chuàng)新研制模式的實施勢在必行。
1 產(chǎn)品智能裝配面臨的主要問題
從產(chǎn)品裝配未來發(fā)展方向來看,建設(shè)和使用基于機器人作業(yè)的智能化柔性裝配廠房車間是主要的發(fā)展趨勢。其具有良好的響應(yīng)內(nèi)部和外部變化的能力,可以適應(yīng)于多種產(chǎn)品,同時利用先進傳感器技術(shù),精準(zhǔn)獲取裝配信息與數(shù)據(jù),實現(xiàn)裝配質(zhì)量實時分析與把控。但是,采用智能制造的方式進行航天復(fù)雜產(chǎn)品裝配生產(chǎn),并非直接將機器人、MES(生產(chǎn)線管控軟件)、ERP等軟硬件直接搬進航天復(fù)雜產(chǎn)品智能裝配生產(chǎn)線進行生產(chǎn)調(diào)試那么簡單,而是需要從智能化設(shè)備和航天復(fù)雜產(chǎn)品兩方面入手[1-2]。智能化設(shè)備方面,需要采用各種自動化、智能化設(shè)備,如機器人、AGV(自動導(dǎo)引小車)、管控軟件等,針對生產(chǎn)過程的信息采集與分析處理,實現(xiàn)生產(chǎn)的自主化和智能化;航天復(fù)雜產(chǎn)品方面,由于現(xiàn)有設(shè)計師對機器人等設(shè)備自動化裝配工藝了解不夠,進行航天復(fù)雜產(chǎn)品設(shè)計時往往還是面向人工裝配。因此,現(xiàn)階段復(fù)雜產(chǎn)品的智能裝配往往存在以下問題[3-5]。
a)裝配工藝難度增大。采用以機器人為主要生產(chǎn)力的智能化裝配工藝,主要裝配動作由機器人和柔性工裝等自動化設(shè)備完成。這就要求待生產(chǎn)產(chǎn)品的各個零件上需要設(shè)計合適的夾持和定位結(jié)構(gòu),而目前零件上大都未進行該項設(shè)計,因此采用機器人裝配時,需要額外進行工藝工裝設(shè)計與調(diào)試,增加了產(chǎn)品裝配工藝難度。
b)生產(chǎn)效率降低。航天復(fù)雜產(chǎn)品具有裝配空間狹小、裝配零件多的特點,對于無法夾持的零件需要采用諸如真空吸附、電磁吸附等方式進行夾取。當(dāng)機器人運行速度提升時,上述夾持方式會導(dǎo)致零件晃動,導(dǎo)致零件末端精度損失。因此,往往為保證裝配精度,需要犧牲機器人運動速度,從而降低了生產(chǎn)效率。
c)生產(chǎn)線成本增高,系統(tǒng)可靠性降低。為保證產(chǎn)品裝配精度與產(chǎn)品質(zhì)量,現(xiàn)階段進行生產(chǎn)線設(shè)計時,需要針對零件額外設(shè)計二次定位工裝,或采取基于視覺的精度補償機構(gòu)。上述設(shè)計將額外增加生產(chǎn)線硬件設(shè)備及裝調(diào)工作量,增加生產(chǎn)線建設(shè)成本。同時,增加的軟硬件加大了系統(tǒng)復(fù)雜度,降低了系統(tǒng)可靠性。
綜上,開展航天復(fù)雜產(chǎn)品智能裝配生產(chǎn)時,需要對傳統(tǒng)的、面向人工裝配的產(chǎn)品結(jié)構(gòu)設(shè)計方法進行革新,形成面向機器人作業(yè)的結(jié)構(gòu)設(shè)計方法,從而為后續(xù)生產(chǎn)線設(shè)計、調(diào)試及產(chǎn)品生產(chǎn)奠定基礎(chǔ)。
2 國內(nèi)外現(xiàn)狀和發(fā)展趨勢
智能制造目前已逐漸成為世界主要工業(yè)化國家重振制造業(yè)的重要突破口,國外一些航空航天企業(yè)將汽車行業(yè)的生產(chǎn)線思路引入到其產(chǎn)品裝配中,建設(shè)了具有航空航天產(chǎn)品特色的裝配生產(chǎn)線,大幅提高了產(chǎn)品裝配的質(zhì)量和效率,降低了生產(chǎn)成本。
美國雷錫恩公司結(jié)合航天復(fù)雜產(chǎn)品生產(chǎn)制造流程,建立了以 “柔性生產(chǎn)單元”、 “多航天復(fù)雜產(chǎn)品制造設(shè)備”、 “數(shù)字化管理系統(tǒng)”等為代表的先進裝配生產(chǎn)線,并于2012年投入使用,如圖 1所示。該工廠通過 “標(biāo)準(zhǔn)化”、 “通用化”、 “模塊化”設(shè)計思想,集成了機器人技術(shù)、計算機控制技術(shù)和數(shù)字化技術(shù)等,具有自動化程度高、制造成本低、安全性高、任務(wù)可靠性高等特點,并能夠根據(jù)生產(chǎn)過程的變化進行快速響應(yīng)和及時調(diào)整,同時盡可能地減少對生產(chǎn)過程的中斷,裝配生產(chǎn)周期和制造成本較原生產(chǎn)模式降低20%,且裝配工位的人員大幅度縮減,極大地提高了產(chǎn)品的研發(fā)能力、生產(chǎn)能力、保障能力、創(chuàng)新能力。

圖1 雷錫恩公司航天復(fù)雜產(chǎn)品的數(shù)字化總裝線
其他航天復(fù)雜產(chǎn)品的生產(chǎn)企業(yè),也采用了先進的裝配技術(shù)。美國波音公司配備的航天復(fù)雜產(chǎn)品柔性對接系統(tǒng),其采用激光跟蹤儀作為對接測量系統(tǒng)實時監(jiān)測對接偏差,并由數(shù)字化管理系統(tǒng)根據(jù)偏差信息驅(qū)動導(dǎo)軌式數(shù)控對接平臺,完成航天復(fù)雜產(chǎn)品的艙段對接,如圖2所示。美國白沙航天復(fù)雜產(chǎn)品柔性對接系統(tǒng),對接方式與雷錫恩公司的系統(tǒng)基本一致,對接系統(tǒng)采用伺服電機驅(qū)動如圖3所示。

圖2 波音航天復(fù)雜產(chǎn)品柔性對接系統(tǒng)

圖3 美國白沙航天復(fù)雜產(chǎn)品柔性對接系統(tǒng)
國內(nèi)飛機行業(yè)近十年來開展了大量柔性裝配工裝、數(shù)字化裝配技術(shù)的研究,在多個單項技術(shù)上實現(xiàn)了突破,并在典型飛機型號的研制和生產(chǎn)中得到應(yīng)用。中航工業(yè)西飛公司2010年5月基本建成并正式投入使用了國內(nèi)首條飛機總裝脈動式生產(chǎn)線;沈陽和成都飛機制造公司在其最新型號飛機的總裝制造中,均建成了融合先進數(shù)字化和自動化設(shè)備的總裝生產(chǎn)線,保證了新型號產(chǎn)品的總裝質(zhì)量,縮短了總裝周期,降低了制造成本。上海飛機制造公司在其C919的裝配生產(chǎn)線建設(shè)過程中,引進了FIT公司的自動化工裝和智能化設(shè)備,建成先進的飛機裝配生產(chǎn)線。
在我國航天復(fù)雜產(chǎn)品研制領(lǐng)域,北京電子工程總體研究所基于復(fù)雜產(chǎn)品智能制造系統(tǒng)國家重點實驗室,開展了航天復(fù)雜產(chǎn)品智能裝配技術(shù)研發(fā),設(shè)立了基于智能裝配中心和人機協(xié)作中心的智能集成裝配生產(chǎn)示范線,成功實現(xiàn)了兩類典型航天產(chǎn)品的智能化裝配演示,為航天復(fù)雜產(chǎn)品智能制造奠定了基礎(chǔ)。
3 面向智能裝配的結(jié)構(gòu)設(shè)計標(biāo)準(zhǔn)研究
3.1 基本要求
面向智能裝配的航天復(fù)雜產(chǎn)品結(jié)構(gòu)設(shè)計應(yīng)從方案設(shè)計階段開始,對航天復(fù)雜產(chǎn)品結(jié)構(gòu)、設(shè)備接口結(jié)構(gòu)、線纜等進行設(shè)計,最終形成滿足總體要求的各類技術(shù)文件。具體包括結(jié)構(gòu)設(shè)計和協(xié)同仿真兩部分內(nèi)容。 “結(jié)構(gòu)設(shè)計工作”包括確定裝配方式、夾持與定位結(jié)構(gòu)設(shè)計、裝配精度分析等。 “協(xié)同仿真工作”包括裝配順序規(guī)劃、裝配路徑規(guī)劃和裝配過程仿真。由結(jié)構(gòu)設(shè)計師、工藝設(shè)計師共同參與完成。結(jié)構(gòu)設(shè)計師主導(dǎo)完成結(jié)構(gòu)設(shè)計工作,工藝設(shè)計師配合;工藝設(shè)計師主導(dǎo)完成協(xié)同仿真工作,結(jié)構(gòu)設(shè)計師配合。
3.2 結(jié)構(gòu)設(shè)計方法
面向智能裝配的航天產(chǎn)品結(jié)構(gòu)設(shè)計的獨特性體現(xiàn)在結(jié)構(gòu)設(shè)計的同時需要考慮產(chǎn)品裝配可實現(xiàn)性,結(jié)構(gòu)設(shè)計師先確定裝配方式,再進行夾持與定位結(jié)構(gòu)設(shè)計,最后進行裝配精度分析,如圖4所示。
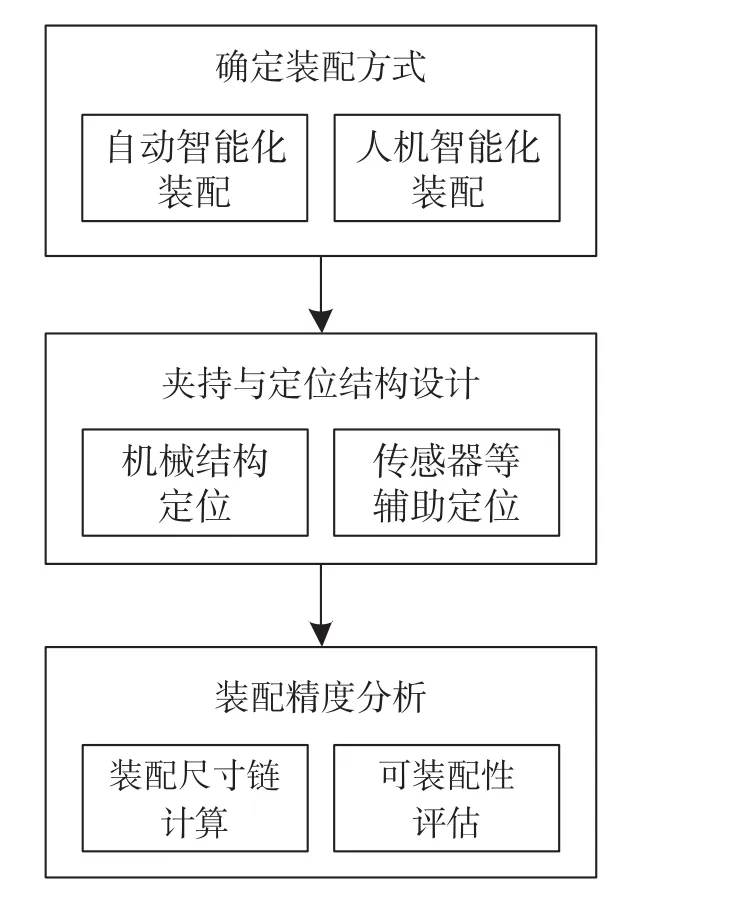
圖4 結(jié)構(gòu)設(shè)計方法
a)裝配方式的確定。結(jié)構(gòu)設(shè)計師進行結(jié)構(gòu)設(shè)計之前,需要判定該零部組件采用何種裝配方式,自動智能化裝配或人機智能化裝配。一般原則為:剛性、裝配空間充足的零件以及重量較大、裝配精度要求較高的零部組件適合自動智能化裝配;而柔性零件、裝配空間狹小的零件適合人機智能化裝配。選擇裝配方式時,盡可能采用相同的裝配方向,優(yōu)先考慮自上而下的裝配方向。
b)夾持與定位結(jié)構(gòu)設(shè)計。當(dāng)裝配過程中需要采用機器人等自動化設(shè)備進行裝配時,零部組件必須有夾持特征,并設(shè)計機械定位結(jié)構(gòu),或者采用相機等傳感器進行輔助定位。建議優(yōu)先采用機械結(jié)構(gòu)定位,夾持結(jié)構(gòu)、定位結(jié)構(gòu)應(yīng)進行系列化設(shè)計,采用定位銷、定位槽實現(xiàn)零件夾持與定位的示例如圖5所示。零件裝配表面應(yīng)增加輔助裝配特征,包括導(dǎo)向槽、圓角、倒角等。當(dāng)采用圖像識別等輔助定位方式時,識別特征點、線、面應(yīng)與零件周圍特征有明顯色差。艙段連接結(jié)構(gòu)處設(shè)置標(biāo)記點、線或面,并增加艙段連接導(dǎo)向特征。進行結(jié)構(gòu)設(shè)計時,應(yīng)為裝配設(shè)備、工具、工裝、夾具等留有操作空間,并在裝配過程中保持活動部件姿態(tài)固定。
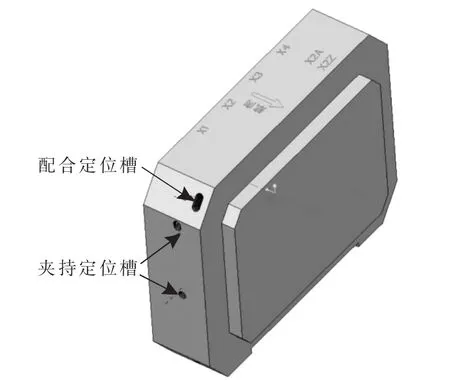
圖5 夾持與定位結(jié)構(gòu)設(shè)計示例
c)裝配精度分析。因為夾持與定位結(jié)構(gòu)的設(shè)計以及裝配工裝、夾具的設(shè)計,直接影響產(chǎn)品的最終裝配精度,所以在結(jié)構(gòu)設(shè)計時,需對產(chǎn)品的最終裝配精度進行分析。主要包括:產(chǎn)品的裝配尺寸鏈分析,確定產(chǎn)品最終裝配尺寸公差是否在容許范圍內(nèi),同時根據(jù)計算結(jié)果評估產(chǎn)品的可裝配性,并進行結(jié)構(gòu)設(shè)計方案優(yōu)化。
3.3 協(xié)同仿真方法研究
依托產(chǎn)品設(shè)計結(jié)果,進行協(xié)同仿真。應(yīng)分層、分級進行零部組件裝配順序規(guī)劃,評估裝配工藝性和可裝配性。主要包括以下內(nèi)容。
a)裝配順序規(guī)劃。按照產(chǎn)品結(jié)構(gòu)樹進行裝配順序規(guī)劃,符合自底向上、逐級向上的原則。為提升裝配效率,裝配順序應(yīng)適當(dāng)并行與串行。裝配過程中應(yīng)避免干涉、碰撞。依據(jù)裝配順序規(guī)劃結(jié)果,為每步裝配選擇合適的工具、工裝和設(shè)備。應(yīng)避免不同設(shè)備、工裝或工具間的頻繁切換,盡可能減少所需設(shè)備、工裝和工具的數(shù)量。
b)裝配路徑規(guī)劃。為保證產(chǎn)品裝配可行性,需要針對每個最小裝配單元進行裝配路徑規(guī)劃,確定零部組件夾持方式、裝配路徑中的位置和姿態(tài),評估裝配路徑中的碰撞和干涉問題,評估設(shè)備的承載能力,運動范圍是否滿足設(shè)計要求,同時從人因工程角度評估工作人員工作狀態(tài),確保工作人員處于合適的工作姿態(tài)。
c)裝配仿真。借助專業(yè)仿真軟件形成裝配仿真,直觀反映裝配順序、裝配路徑,發(fā)生碰撞、干涉時,設(shè)備運行到達限位或極限時,以直觀方式提示,輸出裝配仿真視頻,用于生產(chǎn)指導(dǎo)。根據(jù)仿真結(jié)果生成機器人等自動化設(shè)備路徑規(guī)劃,用于機器人現(xiàn)場編程。
本文針對航天復(fù)雜產(chǎn)品智能裝配的應(yīng)用需求,從產(chǎn)品設(shè)計源頭出發(fā),提出了若干面向機器人裝配作業(yè)的產(chǎn)品結(jié)構(gòu)設(shè)計方法,指導(dǎo)航天復(fù)雜產(chǎn)品進行結(jié)構(gòu)設(shè)計,希望能為后續(xù)智能裝配生產(chǎn)線建設(shè)與產(chǎn)品生產(chǎn)奠定基礎(chǔ)。
猜你喜歡
建材發(fā)展導(dǎo)向(2023年6期)2023-03-31 02:51:38
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發(fā)展導(dǎo)向(2021年13期)2021-07-28 07:15:50
印刷工業(yè)(2020年4期)2020-10-27 02:45:52
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:23