基于直接電流控制的BLDCM換相轉矩脈動抑制
2020-01-16 10:20:02胡興洋羅德榮
微特電機 2020年1期
胡興洋,羅德榮
(湖南大學 電氣與信息工程學院,長沙 410082)
0 引 言
無刷直流電機(以下簡稱BLDCM)由于體積小、轉矩電流比大、控制方式簡單、維護方便等優點,在伺服驅動、電動汽車、工業控制等領域的應用日益廣泛[1-2]。在BLDCM的控制系統中,由于電機反電動勢是梯形波,為了保證電機輸出轉矩最大,一般采用60°兩兩換相的導通驅動方式,而傳統的PWM調壓控制系統存在明顯的換相轉矩脈動,這限制了其在低噪聲、高精度控制領域的應用[3]。
針對這一問題,文獻[4-5]采用了基于轉矩和磁鏈雙滯環結構的直接轉矩控制,但這需要估測電機的實際轉矩和磁鏈;文獻[6-7]在文獻[4-5]的基礎上省去了磁鏈環節,僅采用轉矩單環控制,結合6個離散的磁極位置信號,來選擇電壓矢量,簡化了系統結構;文獻[8-9]將PWM-ON調制法和重疊換相法相結合,控制關斷相的電流,進而減小轉矩抖動;文獻[10]采用預測電流控制加重疊換相的策略來減小電流脈動。
為了進一步簡化控制系統結構,本文詳細分析了BLDCM在兩兩導通驅動模式下輸出轉矩與非換相電流之間的關系,從而省去轉矩觀測環節,直接以電流為控制目標,提出一種直接電流控制方式。該方案仍使用轉速、電流雙閉環控制結構,轉速外環采用PI控制,電流內環采用滯環比較控制,根據滯環比較器的輸出來決定導通相的關斷,實現對電流的跟蹤控制,從而減小相電流和轉矩抖動。仿真及實驗結果表明,該方法能有效抑制換相電流和轉矩波動,提高轉矩的響應速度,減小轉速波動,同時又具有控制簡單、觀測量少、易于實現等優點。
1 BLDCM數學模型及其脈寬調壓控制
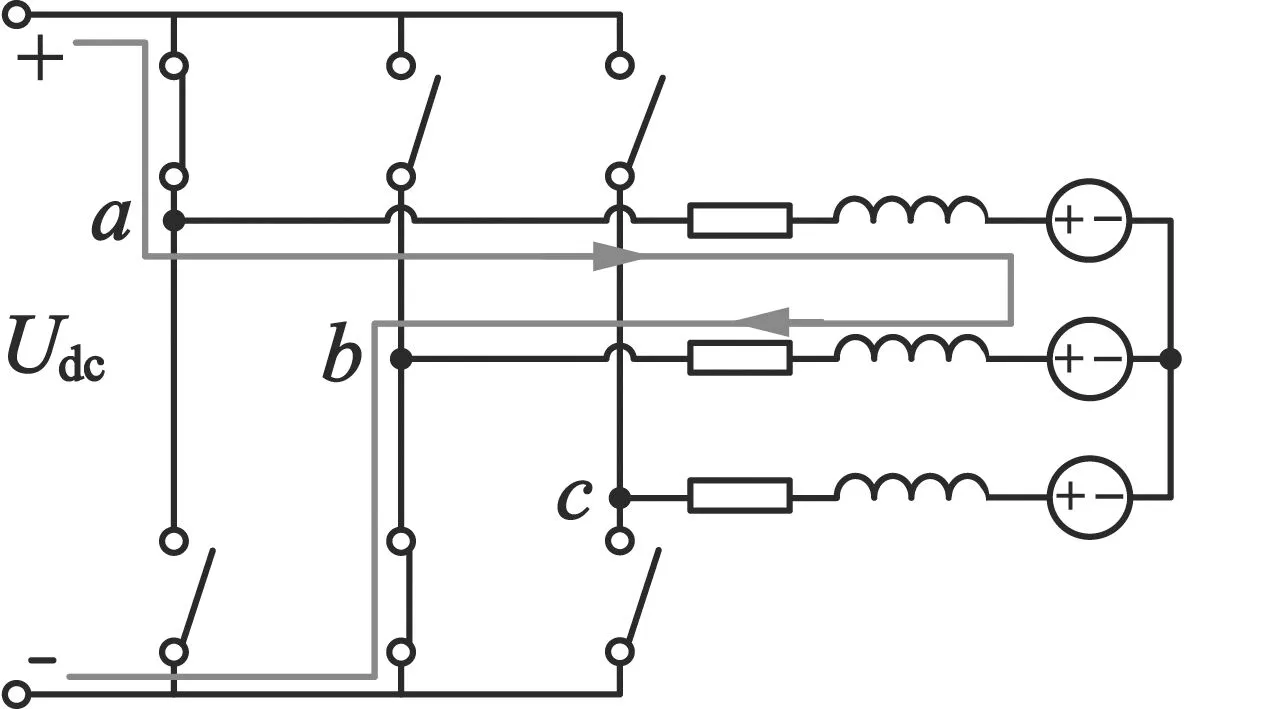
BLDCM控制系統主電路結構如圖1所示,控制器采用全橋驅動結構,電機繞組采用Y型連接方式。假定三相繞組對稱,且三相反電動勢均為平頂寬度為120°的理想梯形波。
圖1中,V1~V6為全控開關器件。
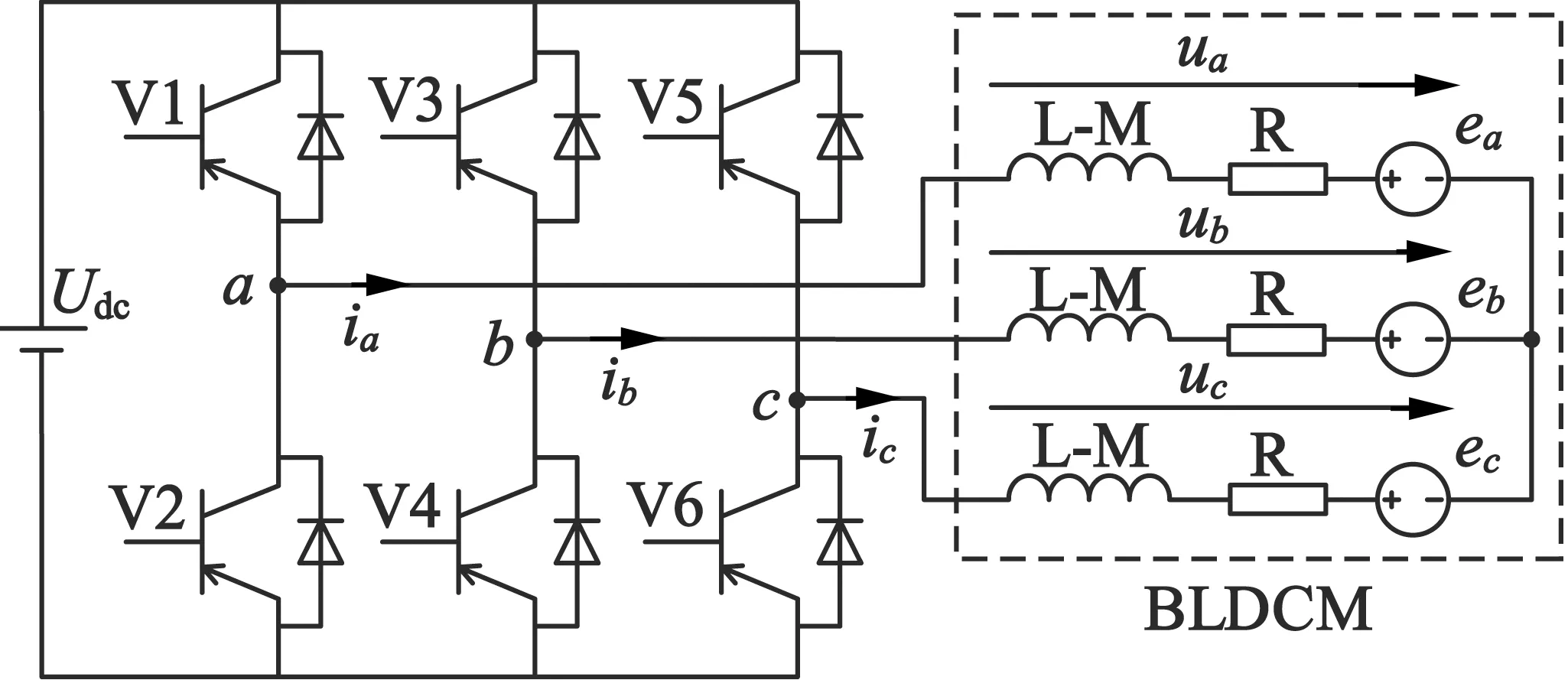
圖1 BLDCM主電路結構
BLDCM三相定子電壓和電流方程:
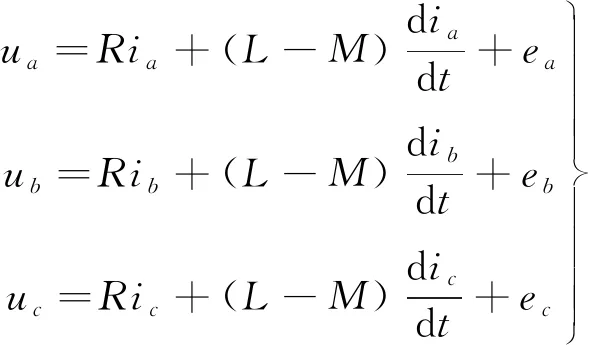
(1)
ia+ib+ic=0
(2)
式中:ua,ub,uc,ia,ib,ic,ea,eb,ec分別為電機三相對稱繞組的端電壓、相電流以及相反電動勢;R,L,M分別為電機每相繞組的電阻、自感以及互感。
BLDCM的輸出轉矩可表示:
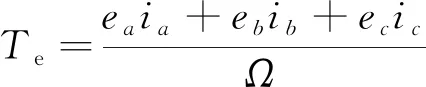
(3)
式中:Ω為電機機械角速度;Te為電機輸出轉矩。
由式(3)可知,在電機轉速穩定時,要保證輸出轉矩恒定,各相反電動勢與其電流乘積之和必須保持恒定。而由于BLDCM的反電動勢一般為梯形波,要保持轉矩恒定,則必須保證三相輸出電流是與電機反電動勢平頂波同寬度、同向或反向的方波[11]。
由于其特殊的反電動勢結構,永磁BLDCM一般采用開關型霍爾元件作為位置傳感器,3個霍爾元件的安裝位置相差120°電角度,通過感應磁極正負,可提供6個間隔均勻且非連續位置信號,以此來決定導通相和非導通相。傳統的調壓控制系統中,一般采用轉速、電流雙閉環控制結構,通過轉速閉環得到電流參考值,再通過電流閉環得到工作相電壓,然后根據該電壓值對直流電壓進行PWM調制以產生對應的PWM波[12]。常見的PWM調壓方式有H_PWM-L_ON、H_ON-L_PWM、H_PWM-L_PWM,其中H_PWM-L_ON控制方式最為理想。BLDCM傳統雙閉環控制原理框圖如圖2所示。

圖2 BLDCM傳統雙閉環控制系統
根據BLDCM的控制原理可知,在一個電周期需要進行6次換相,因此可以將空間劃分為6個扇區。其中,b相反電動勢恒定且為正,c相反電動勢恒定且為負的區域為定義為扇區Ⅰ。當電機逆時針旋轉,兩兩導通控制方式下的BLDCM反電動勢、相電流、霍爾信號、扇區分布以及功率器件開通狀態的對應關系如圖3所示,導通順序如表1所示。
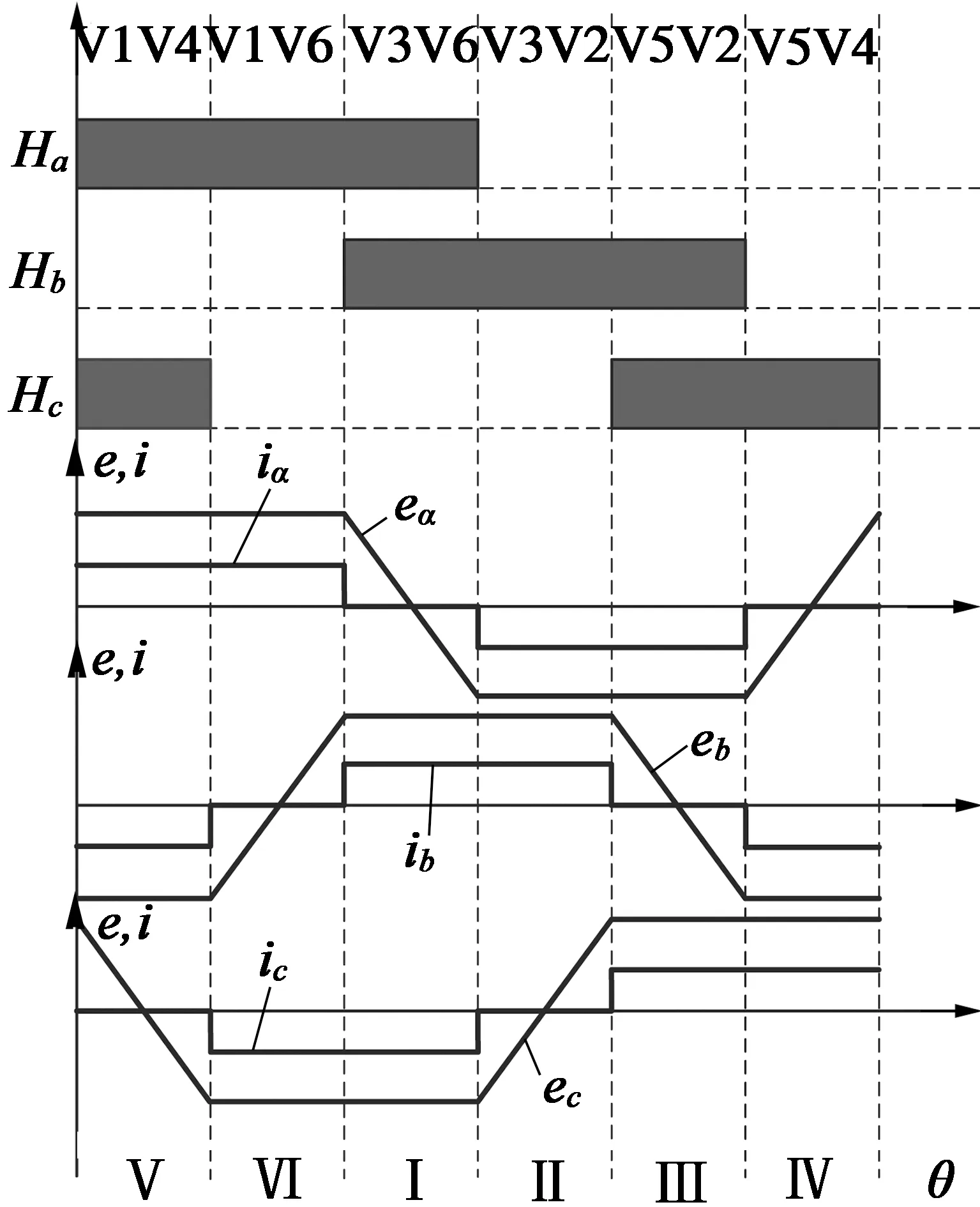
圖3 霍爾信號、反電勢、相電流以及扇區分布表1 逆時針旋轉導通順序表
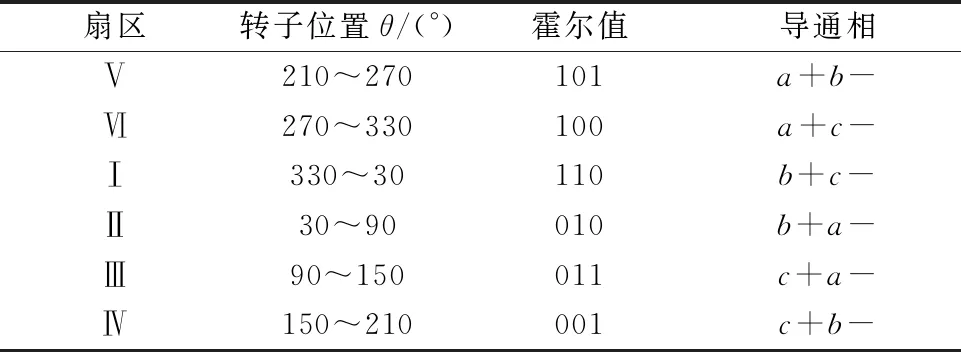
扇區轉子位置θ/(°)霍爾值導通相Ⅴ210~270101a+b-Ⅵ270~330100a+c-Ⅰ330~30110b+c-Ⅱ30~90010b+a-Ⅲ90~150011c+a-Ⅳ150~210001c+b-
2 BLDCM直接電流控制系統
2.1導通相電流與轉矩的關系
BLDCM采用兩兩導通驅動方式時,輸出轉矩和導通電流的關系可分為換相階段和非換相階段。
以圖3扇區Ⅵ為例,分析電機在非換相階段轉矩與電流的關系,此時b相關斷,a相上橋臂導通,c相下橋臂導通,可知ib= 0且ia=-ic,根據式(3)可得:

(4)
因BLDCM反電動勢平頂波與轉速成正比,設其反電動勢系數為Ke,由圖3可知,此時ec=-KeΩ,ea=KeΩ,將ea和ec代入式(4)可得:
Te=2Keia
(5)
式(5)說明,當電機轉速穩定時,在非換相階段,BLDCM輸出轉矩Te與導通相電流ia成正比,其結構及特性類似直流電機。
同理,以電流從扇區Ⅴ換相到扇區Ⅵ為例,分析電機在換相階段的轉矩與電流對應關系。由于換流過程很快,可認為此過程中各相反電動勢基本保持不變,則ea=KeΩ,eb=-KeΩ,ec=-KeΩ,根據式(2)、式(3)可得:
Te=Ke(ia-ib-ic)=2Keia
(6)
式(6)說明,在電機換相過程中,電機輸出轉矩與非換相電流成正比。
結合式(5)、式(6)可知,在扇區Ⅵ換相階段和非換相階段,電機輸出轉矩都與非換相電流ia成正比。由此可知,電機輸出轉矩可以由每個扇區的非換相電流來決定。每個扇區的非換相電流與霍爾信號的對應關系如表2所示。
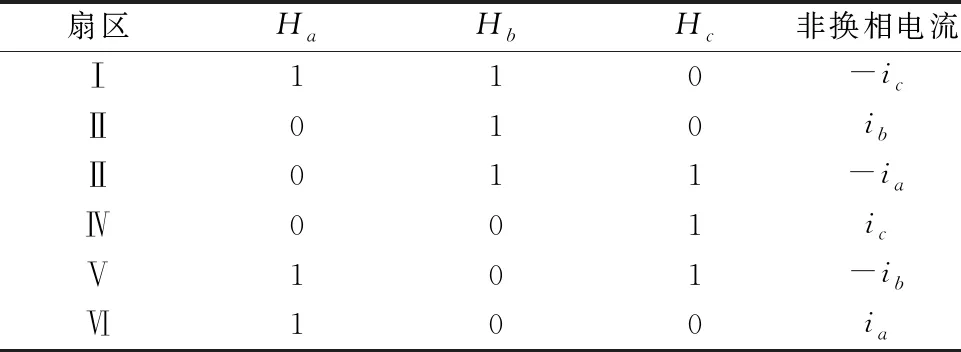
表2 非換相電流與霍爾信號對應關系
由表2可得,電機在整個運行過程中,非換相電流與霍爾信號值的關系如下:
由上述分析可知,在電機運行過程中,只要控制了非換相電流iact,就等于控制了電機的輸出轉矩,以此為依據建立BLDCM直接電流控制系統。
2.2直接電流控制系統結構
圖4為BLDCM直接電流控制系統結構框圖,主要包括直流電源、逆變器、電機本體、速度PI調節器、電流滯環調節器、非換相電流選擇模塊以及導通相關斷選擇模塊。
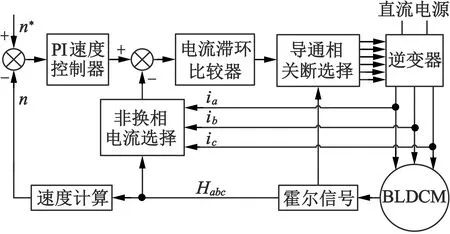
圖4 BLDCM直接電流控制系統結構框圖
該直接電流控制系統仍采用速度外環以及電流內環控制結構。為了迅速跟蹤電流變化,電流內環采用滯環比較控制,轉速差值nerr經速度調節器得到參考電流iref,再根據霍爾信號Habc選擇非換相電流iact,電流誤差ierr經滯環比較后得到相應的電流調節信號τ,最后結合霍爾信號來決定導通相的關斷,實現對電流的實時跟蹤控制,進而控制電機輸出轉矩。
2.3電流滯環調節器
電流滯環調節器采用兩點式結構,通過設定滯環控制器容差可以將電流誤差穩定在一定的范圍內,結構如圖5所示。
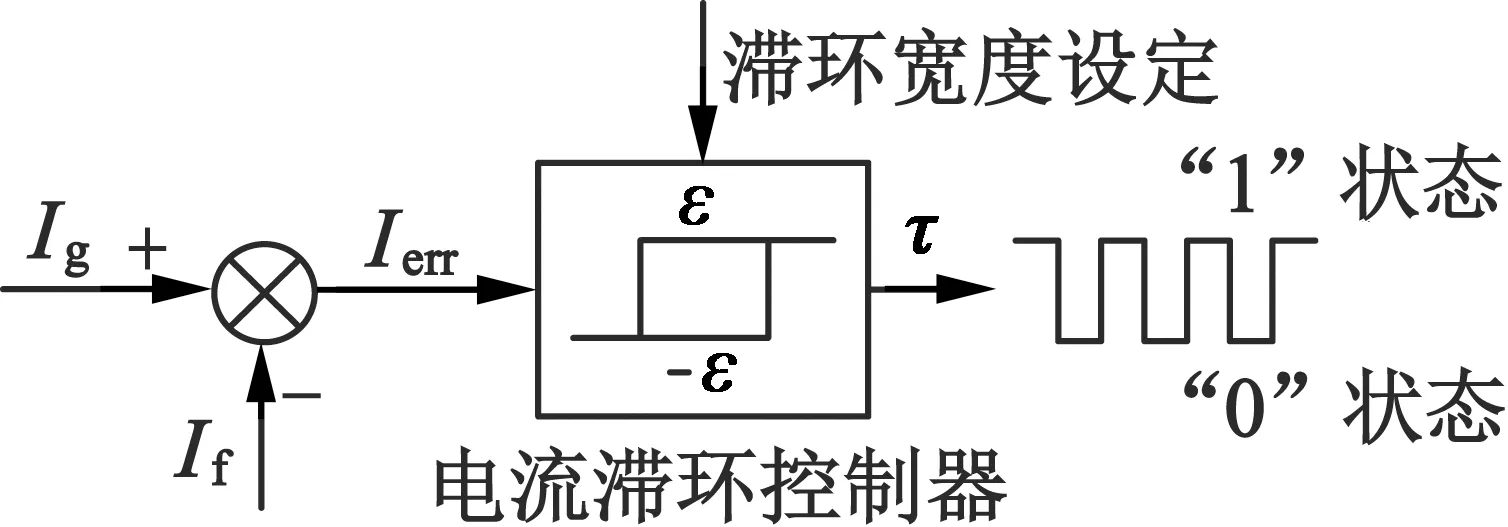
圖5 電流滯環控制器結構
圖5中,電流調節器輸入為給定電流Ig和反饋電流If的差值Ierr,滯環寬度為2ε,調節器輸出為電流控制信號τ,根據該信號來判斷導通相的關斷狀態,以此產生驅動逆變器上下橋臂的控制信號,具體的電流調節過程如圖6所示。

圖6 滯環電流調節過程
在圖6中,t1時刻,參考電流Ig大于反饋電流If,且兩者的差值Ierr大于滯環調節器容差上限ε,即Ierr>ε,調節器輸出的控制信號τ為“1”狀態,此時導通相開通,使得電流If增大,電流差值Ierr減小。當電流差值減小到調節器容差以內,逆變器繼續保持此時的導通狀態,電流If持續增大,甚至超過給定值Ig,直到t2時刻;電流差值Ierr小于滯環調節器的下限-ε,即Ierr< -ε,調節器輸出的控制信號τ為“0”狀態,此時導通相關斷,使得電流If減小,電流差值Ierr增大,直到t3時刻;此時電流調節器的狀態又與t1時刻相同,從而使調節器在t1、t2兩個狀態之間來回切換。因此,通過合理設置滯環比較器上下限值,就能將電流波動穩定在一定的范圍內。根據轉矩與電流的關系可知,此時轉矩波動也會穩定在一定的容差內,從而達到控制轉矩脈動的目的。
2.4系統對換相轉矩脈動的抑制
本文以電流從扇區Ⅴ(a相上橋臂導通、b相下橋臂導通)換相到扇區Ⅵ(a相上橋臂導通、c相下橋臂導通)為例,分析BLDCM換相過程中的電流和轉矩脈動原因。換相過程中的功率器件導通狀態以及電流變化如圖7所示。
(a) 換相前
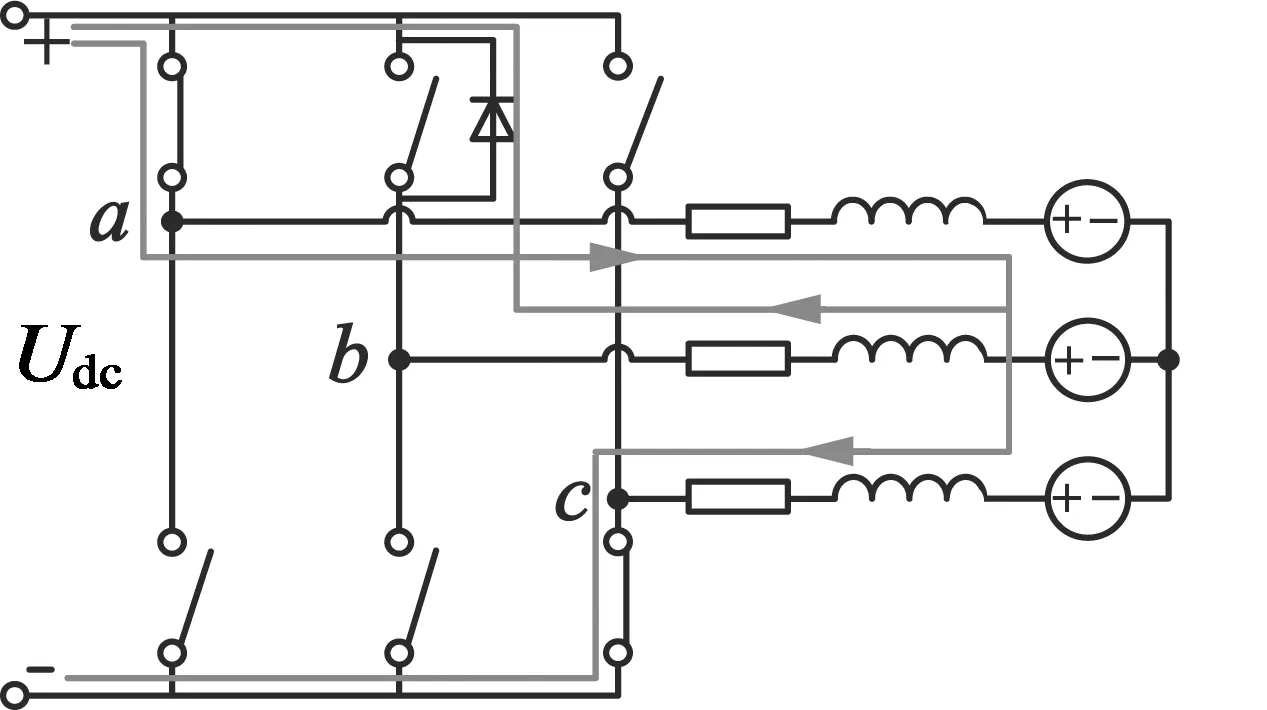
(b) 換相中

(c) 換相后

(d) 換相過程中電流變化(低速)圖7 BLDCM從扇區Ⅴ到扇區Ⅵ電流換相過程
假定反電動勢為理想的梯形波,且當電機轉速穩定時,反電動勢平頂波幅值為E,忽略功率器件和相電阻兩端的壓降,在電流由扇區Ⅴ換相到扇區Ⅵ過程中,由于b相上橋臂二極管續流,故定子三相電壓ua,ub,uc分別為Udc/3,Udc/3,-2Udc/3,如圖7(b)所示。BLDCM電感一般很小,所以換流過程很快,可近似認為此過程中各相反電動勢保持不變,分別為E,-E,-E。由BLDCM的電壓方程式(1)以及逆變器拓撲約束關系,可求解出上述換相期間各相繞組電流變化率分別:
(8)
結合式(2)、式(3)可知,此時電機的轉矩:
Te=-2Ke(ib+ic)
(9)
由式(9)可知,在上述換相過程中,要保持轉矩不變,則ib,ic之和必須保持恒定,即要保證電流ic的上升率與電流ib的下降率相同,而各相電流的變化率與直流側電壓以及反電動勢有關,電機反電動勢又與電機轉速成正比。
在傳統脈寬調壓控制系統中,在換相期間會失去對換相電流的控制,會引起明顯的相電流以及轉矩波動。為了抑制換相過程中的轉矩波動,可以通過對換相過程中導通相電流進行相應的控制來實現[12]。本文提出的直接電流控制方案,能根據反饋的非換相電流來對換相過程中的導通相電流進行實時控制,通過降低或增加導通相電流的上升速率,來維持換相過程中導通相和關斷相的電流平衡,從而達到抑制換相轉矩脈動的目的。
現以電流由扇區Ⅴ換相到扇區Ⅵ為例分析直接電流控制方式下電流調節過程,此時導通相為a相、c相,關斷相為b相,a相電流為非換相電流Iact。當電流換相且電機反電動勢較低時,由于此時c相電流的上升率大于b相電流的下降率,導致a相電流增大。假定此時參考電流為Iref,則換相時Iref
3 仿真及實驗結果
3.1仿真結果
為了驗證上述控制方案的可行性,建立BLDCM直接電流控制系統的Simulink仿真模型,電機參數如表3所示。同時作為對比,以同樣的參數在Simulink中搭建傳統PWM調壓控制系統。
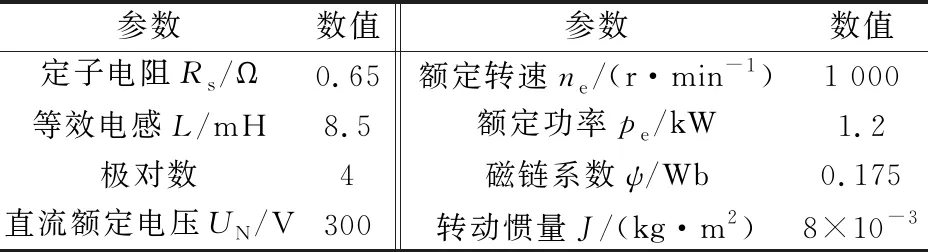
表3 電機參數
電機給定轉速為500 r/min,起動時負載轉矩為10 N·m,0.15 s后負載轉矩突變為15 N·m,仿真時長為0.3 s。
在直接電流控制系統中,電流限幅值為20 A,電流調節器容差ΔI=0.1 A。圖8和圖9分別為傳統PWM調壓控制方式和直接電流控制方式下的轉速、非換相電流、A相電流和轉矩波形。

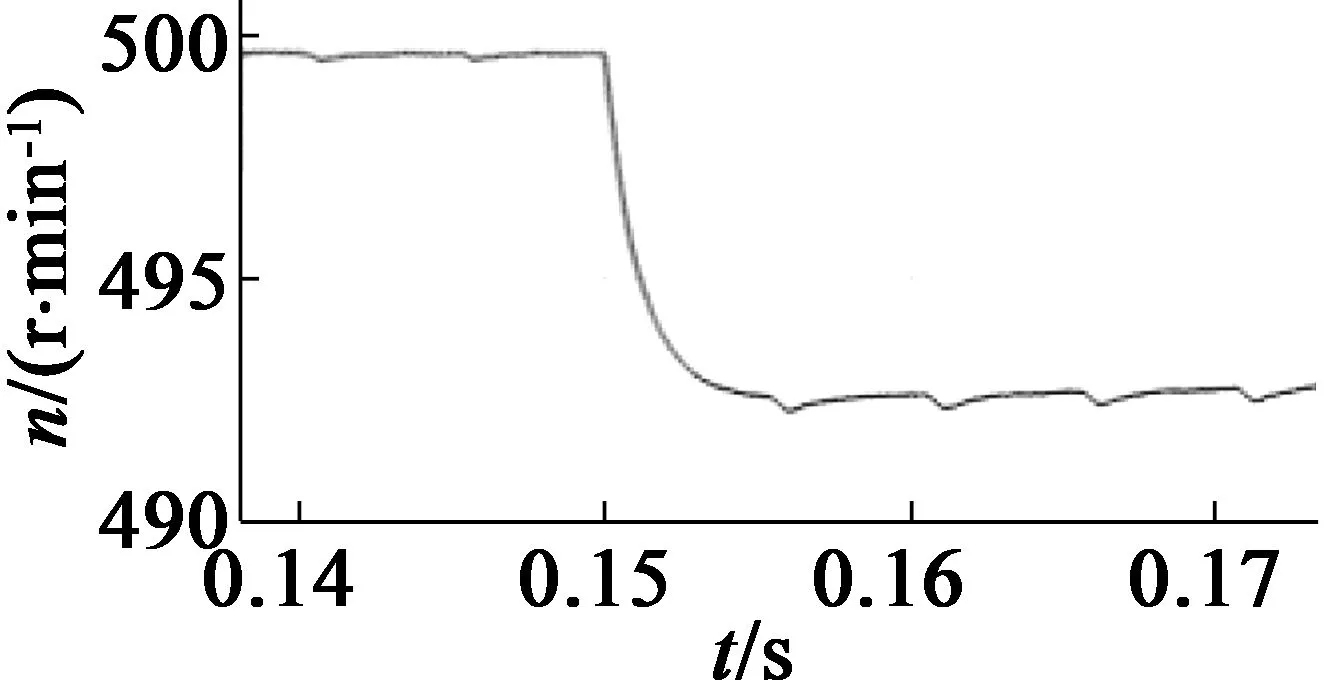
(a) 轉速變化曲線
(b) 非換相電流變化曲線
(c) A相電流變化曲線

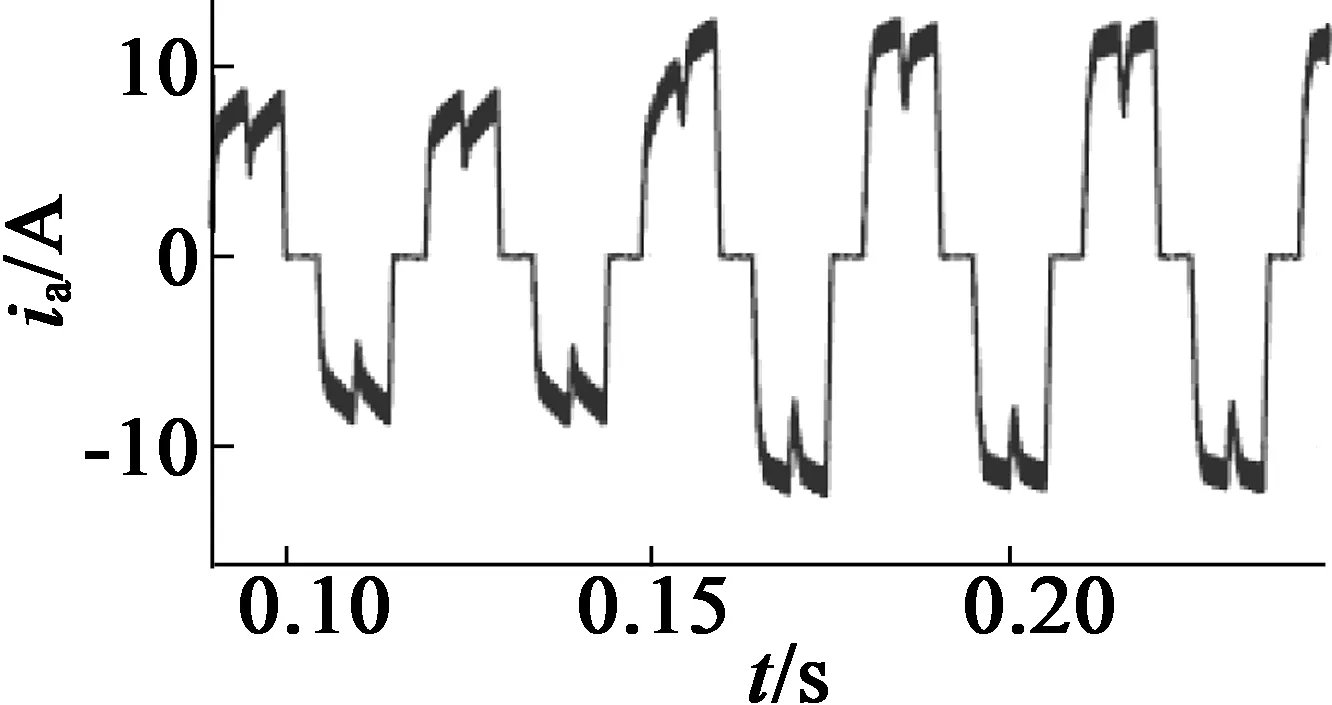
(d) 轉矩變化曲線圖8 傳統PWM調壓控制方式下波形
從圖8可以看出,采用傳統PWM調壓控制方式,電機在穩態運行過程中存在明顯的換相電流和轉矩脈動,這是由于在換流過程中,關斷相和導通相換流速度不一致引起的,從而使得電機轉速也有小幅度的上下波動。從圖8中也可以看出,電機非換相電流與輸出轉矩的變化趨勢是同步的。
(a) 轉速變化曲線

(b) 非換相電流變化曲線
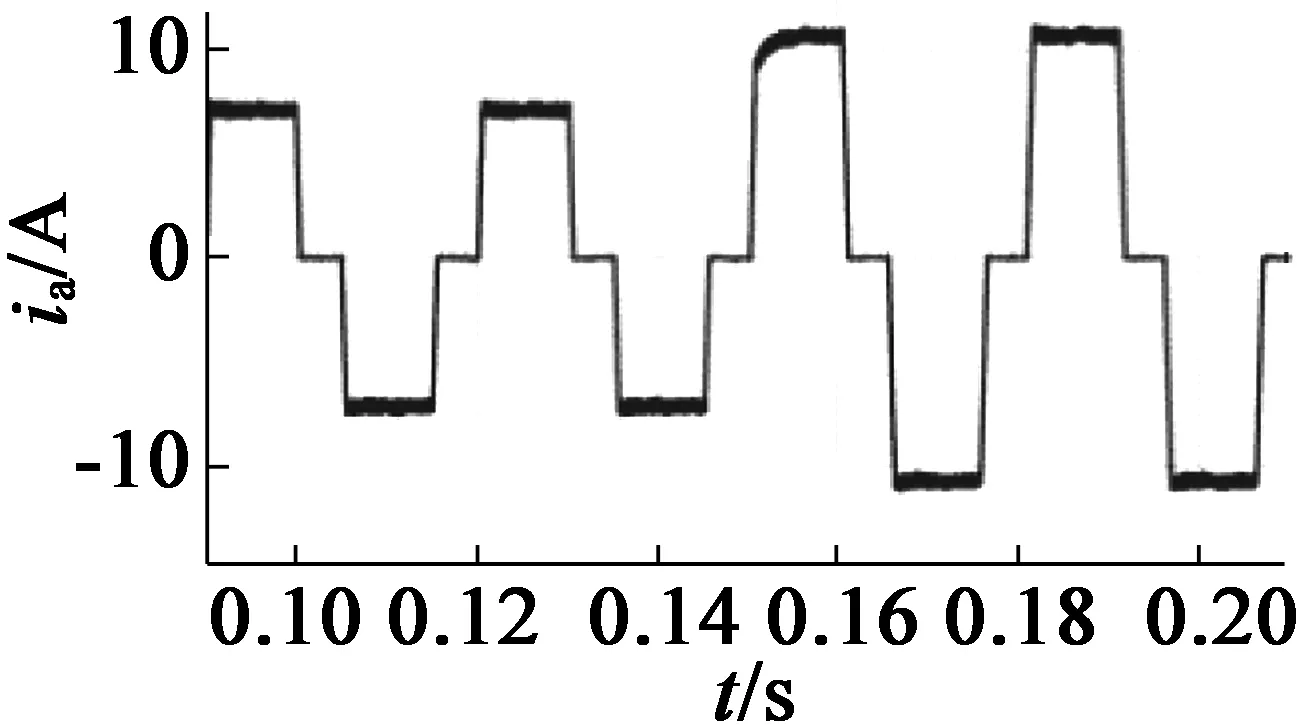
(c) A相電流變化曲線
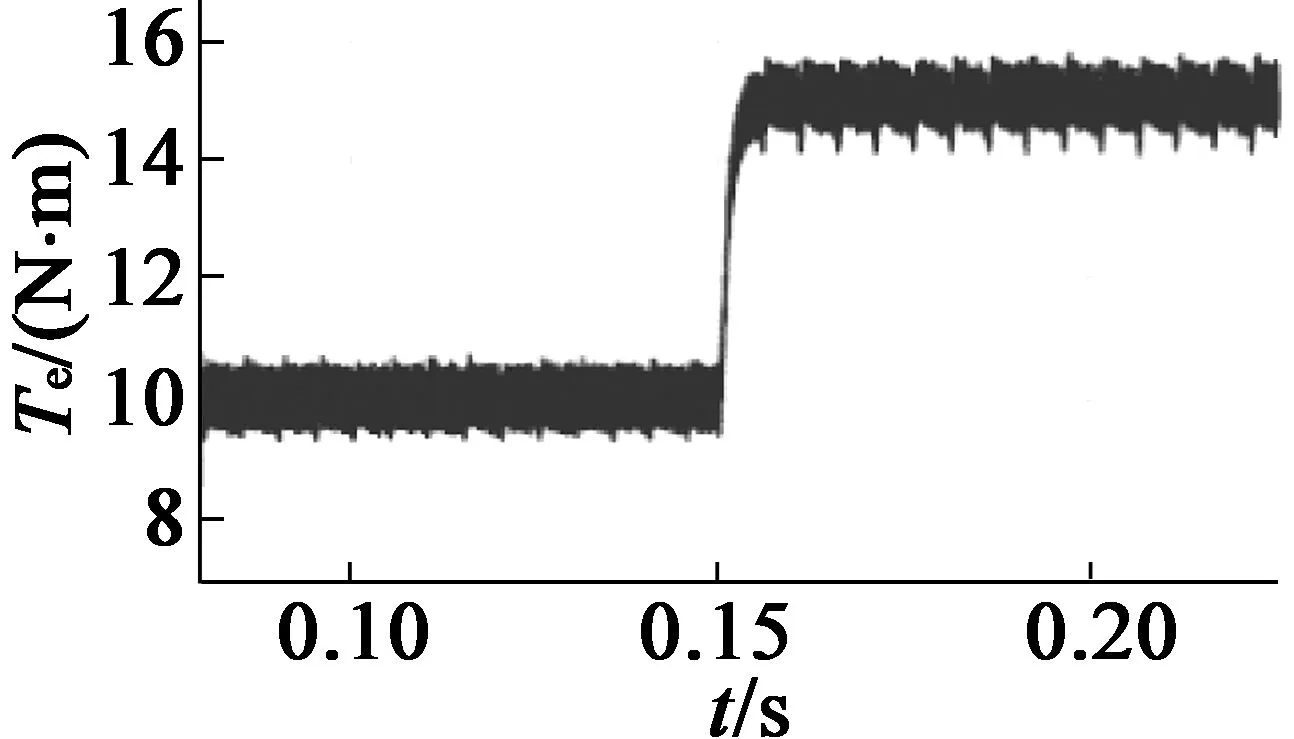
(d) 轉矩變化曲線圖9 直接電流控制方式下波形
從圖9可以看出,當采用直接電流控制方法時,電機能以最大轉矩電流起動,并迅速達到穩定,穩定后轉速波動明顯減小,當負載增加時,輸出轉矩能迅速響應,轉速下降量減小,轉速上升更平緩。而且電機穩態運行過程中,由于電流換相引起的相電流和轉矩抖動明顯減小。與傳統的PWM調壓控制方式相比,該控制方式有更好的動、靜態性能。但由于受到開關頻率的限制,電流和轉矩波動幅度會超出設定的容差。
3.2實驗結果
本文采用美國微星公司的dsPIC30F3010單片機作為控制芯片,搭建了如圖4所示的直接電流控制系統。實驗樣機參數:極對數p=5,直流額定電壓UN=300V,額定功率為PN=1.5kW,額定轉速為n=1 500 r/min。控制算法均由軟件實現,算法控制周期設定為5 kHz。
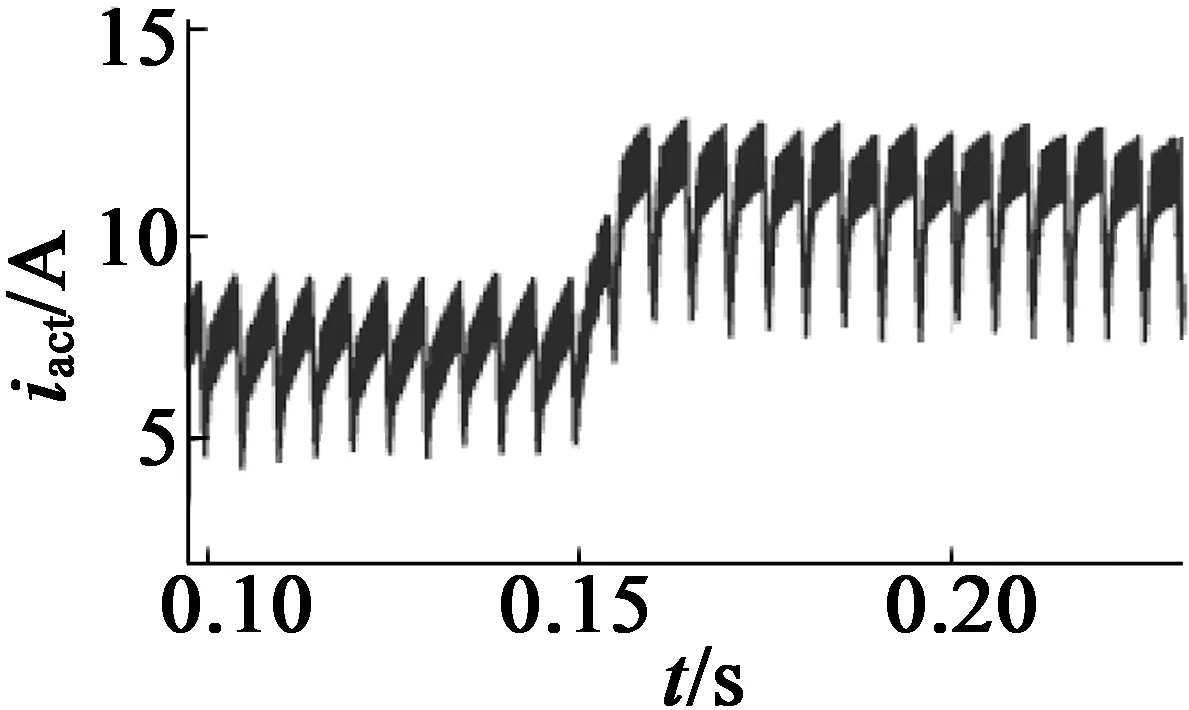
圖10為給定轉速為1 000 r/min,電流滯環調節
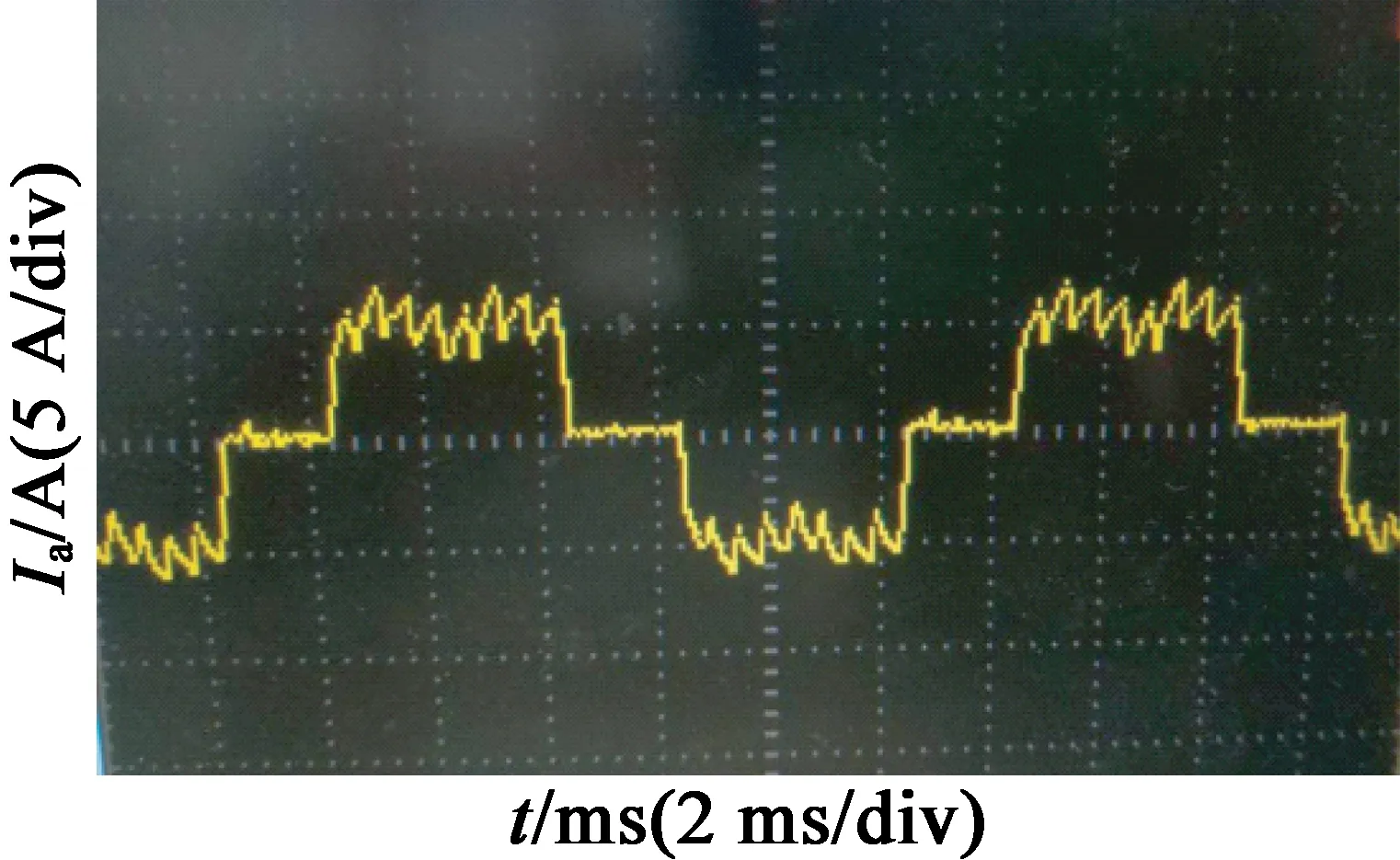
圖10 直接電流控制方式下A相電流波形
器容差ΔI=0.1 A,負載電流I=5 A時,采用直接電流控制方式的A相電流波形。
4 結 語
本文針對BLDCM傳統的脈寬調壓控制方式下換相電流及轉矩脈動較大的問題,詳細分析了電機非換相電流與輸出轉矩之間的關系,以非換相電流為控制目標,提出了一種直接電流控制方案。該方案采用滯環調節器,實時跟蹤電流變化,通過控制導通相關斷,實現對電流的直接控制,進而抑制換相轉矩脈動,其效果類似BLDCM直接轉矩控制,但省略了直接轉矩控制的轉矩和磁鏈觀測環節,使得控制系統更簡潔。仿真及實驗驗證了該控制方法的可行性。
