基于目標跟蹤的變電站隔離開關狀態圖像識別方法
2020-01-15 07:43:02,,
機械與電子 2020年1期
關鍵詞:變電站
,,
(1.貴州電網有限責任公司六盤水供電局,貴州 六盤水 553000; 2.中國礦業大學電氣與動力工程學院,江蘇 徐州 221116)
0 引言
隔離開關作為變電站的重要設備,其狀態的自動識別對于電網智能化設備狀態巡視、設備告警聯動等電網生產運行監控具有重要意義。現有隔離開關的輔助開關定位功能都是基于機械原理。在機械出現磨損時,這種定位將會導致較大的偏差,從而致使對開關的分合狀態判斷失誤。視頻監控技術已廣泛應用于變電站的監控。傳統的視頻監控技術只是將變電站的遠程視頻傳輸到監控室,通過人工查看并確認每個設備的狀態,對于隔離開關的狀態識別效率低下,這極大地增加了運維人員的工作量。因此,如何實現對變電站隔離開關狀態的有效自動識別,成為提高變電站視頻監控的智能化水平和變電站運維效率和安全的關鍵。
利用隔離開關的具體圖像特征,石延輝等[1]通過提取檢測開關的形狀參數來確定隔離開關的狀態 。張浩等[2]提出了一種模板匹配方法,通過取隔行隔列數據進行粗匹配,然后通過相關系數法等對設備狀態進行識別。陳安偉等[3]通過尺度不變特征變換、霍夫變換對隔離開關位置狀態信息進行標準建模,實現對開關狀態的自動識別。邵劍雄等[4]訓練“開”和“合”2種狀態模型,通過檢測和定位來判斷開關的狀態。但是,這些方法均基于靜態圖像進行處理,在對開關狀態檢測與定位時,存在穩定性差、魯棒性不強等問題。
在此,將隔離開關開合過程的動態視頻作為研究對象,通過目標跟蹤技術實時跟蹤開關運行動態軌跡,進而計算閘刀間的像素距離來實時監測開關的分合狀態。
1 基于lasso正則化稀疏表示的目標跟蹤模型
1.1 目標狀態的觀測模型
令目標(隔離開關)的狀態變量為bt=[x,y,w,h], 其中(x,y)為跟蹤框的中心坐標;w為跟蹤框的寬;h為跟蹤框的高。若前t-1幀觀察圖像塊為I1∶t-1=[I1,I2,…,It-1],則第t幀目標狀態遵循下列分布[4-6]:
(1)
當給定第t幀圖像塊時,估計目標的狀態為
(2)
p(It|bt)為觀測模型,表示候選目標可能的狀態。
1.2 lasso正則化稀疏表示的目標跟蹤模型
若目標模板集H={h1,h2,…,hn}∈d×n,則候選目標x∈d×1可表示為模板的線性組合,即x≈Hs=s1h1+s2h2+…+snhn,其中s=[s1,s2,…,sn]T∈n表示系數。實際中,候選目標可以由目標模板中少數模板線性表示,即可稀疏表示為
(3)

由于概率p(It|bt)難以計算,可利用評價函數F(x)逼近p(It|bt),通過評價函數可以確定候選目標是否為真正的跟蹤結果。令H={h1,h2,…,hn}∈d×n為目標模板集,第t幀中的候選目標為x,則定義F(x)為x與所有模板內積和的平均值:
(4)

hi=Aiωi
(5)

hi≈Aiωis.t. ‖ωi‖0≤α
(6)
α為稀疏水平參數。將式(6)代入式(4)得到
(7)

(8)
2 隔離開關分合狀態判斷
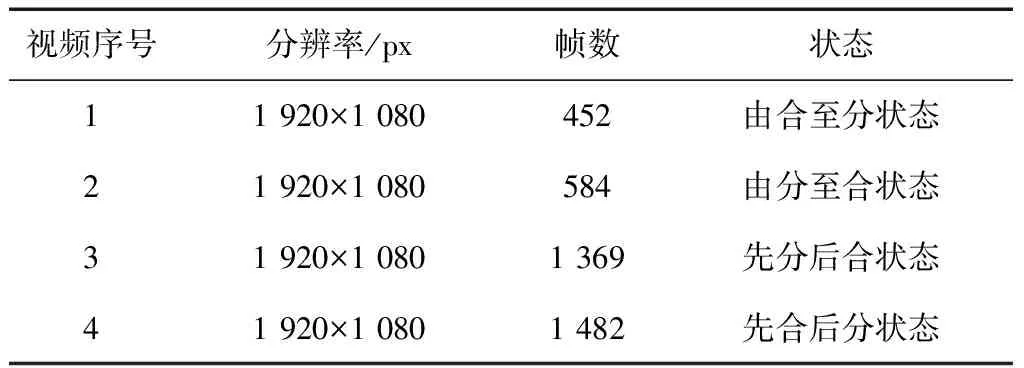
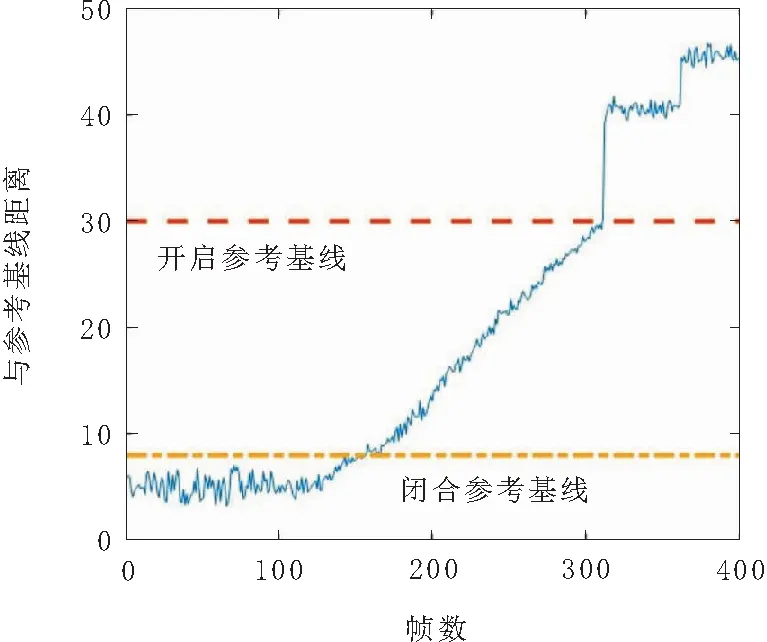
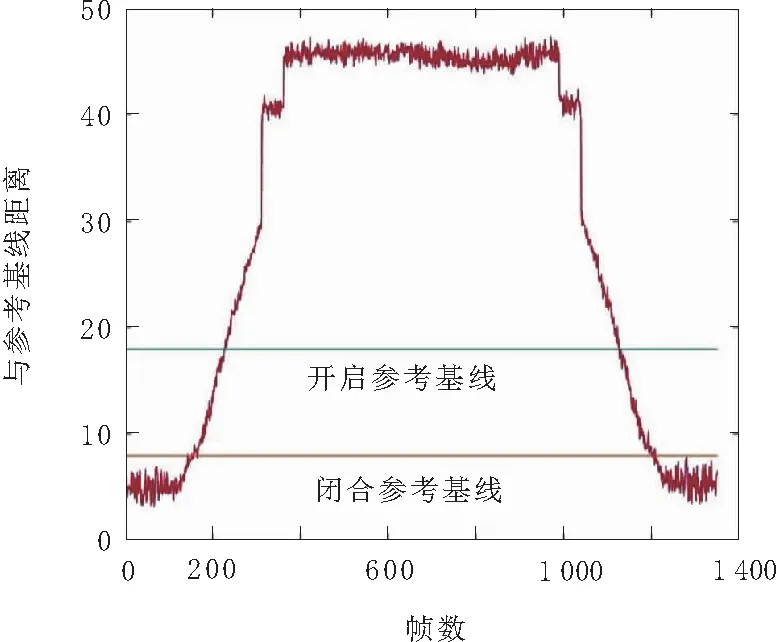
將攝像頭安裝在開關正下方2塊閘刀的中間位置。如圖1所示,取閘刀間的中軸線為基準線(橫向虛線),并選定實時跟蹤點位置(豎向實線頂端的圓點)。假設跟蹤點到虛線的距離為s;s0和s1分別為閾值;st和st+t0分別為第t幀和第t+t0幀跟蹤點與基準線的距離。可依據以下規則對隔離開關狀態進行判斷:s>s0,隔離開關處于開狀態;s 圖1 隔離開關開合狀態的實時跟蹤 實測中采集了4段不同狀態下隔離開關的視頻和對應的隔離開關狀態,如表1所示。 表1 不同狀態下隔離開關的視頻 隔離開關由合到分過程的跟蹤結果如圖2所示。由圖2中第42幀、第91幀、第161幀的跟蹤結果顯示:在有遮擋情況下本文方法仍能較好地跟蹤閘刀的位置;第268幀和第389幀的跟蹤結果表明在旋轉尺度較大時,本文方法亦能給出很好的跟蹤結果。隔離開關由分至合過程中關鍵幀的跟蹤結果如圖3所示。 注:圖中數字為攝像頭采集到隔離開關的圖像幀數序號 注:圖中數字為攝像頭采集到隔離開關的圖像幀數序號 由圖3可知,由分至合的過程時,本文方法同樣可準確地對目標進行跟蹤。 實測中選擇2個閘刀的中線作為參考基線,閘刀的中心作為參考跟蹤點。在對閘刀的位置跟蹤時,實時計算參考跟蹤點與參考基線的距離(相差的像素點數),距離逐漸變大時,說明開關處于由合至開的過程;反之當距離逐漸變小時,則說明開關處于由開至合的過程。隔離開關由合至分過程中參考跟蹤點與參考基線距離(像素點數)的變化曲線如圖4所示,通過與設定的閉合參考基線8和開啟參考基線30閾值進行比較,當距離超出8個像素可認為開關開始打開,當超出30個像素時,則可認為開關處于完全打開狀態,實際應用中這2個參數可根據實際情況進行調整。 隔離開關由合至開的過程中參考跟蹤點和參考基準線(閉合和開啟參考基線分別為8和18)的距離變化曲線如圖5所示。 圖4 隔離開關由合至分過程中參考跟蹤點與參考基線距離(像素點數)的變化曲線 圖5 隔離開關由分至合過程中參考跟蹤點與參考基線距離(像素點數)的變化曲線 距離呈現由小變大過程。這個過程正好對應隔離開關由合至開過程,同樣可利用設定的閾值得出開關的狀態。由圖5可以看出:在開始0~160 幀的范圍內,距離曲線抖動比較大,但基本在7個像素距離附近波動,說明此時開關處于由合至開的開啟階段,且未完全開啟;在接下來的200~400 幀表明距離迅速增大,這個過程對應開關的開啟階段;400 幀以后距離基本處于穩定狀態,則說明開關處于停頓狀態;當視頻到1 000 幀時,距離開始迅速變小,則說明開關開始由分至合;最后到達1 200 幀時,距離基本處于穩定狀態,則說明開關合的過程完畢,處于完全閉合狀態。 給出了基于閘刀運動跟蹤的隔離開關自動圖像識別方法。利用Lasso約束的稀疏表示閘刀跟蹤模型,提高了跟蹤的準確性,并給出了閘刀狀態和閘刀運動狀態識別方案。實測結果表明,本文方法對開關狀態識別具有準確率高、魯棒性好的優點,有較廣泛的實際工程應用價值。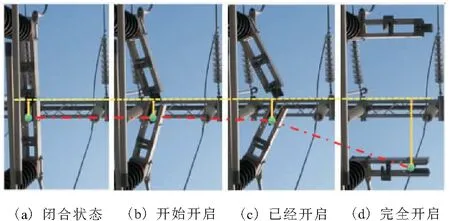
3 實測結果和分析
3.1 開關運行動態軌跡的跟蹤


3.2 開關狀態的識別
4 結束語
猜你喜歡
電子制作(2019年10期)2019-06-17 11:44:56
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年24期)2017-02-02 07:14:44
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
東北電力技術(2016年2期)2016-05-17 04:32:54
河南電力(2015年5期)2015-06-08 06:01:45
中國工程咨詢(2015年10期)2015-02-14 05:57:34
水電站機電技術(2014年1期)2014-09-26 11:59:53
中國機械(2014年15期)2014-04-29 00:09:45
