反距離加權內插的PPP電離層約束定位方法研究
2020-01-14 07:48:56曾傳俊
城市勘測 2019年6期
關鍵詞:方法
曾傳俊
(重慶市勘測院,重慶 401121)
1 引 言
隨著交通物流、無人駕駛以及基于位置的服務(Location-Based Service,LBS)的快速發展,基于GNSS全天候、低成本、高精度的定位技術需求越來越大[1]。而傳統消電離層組合的定位方法雖然消除了電離層誤差,但是會在定位初始階段放大定位信號中的噪聲,導致收斂速度較慢[2]。非差非組合PPP能夠結合外部電離層先驗信息,對PPP進行約束,加快收斂速度。
目前常用的電離層產品方面,克羅布歇模型精度較低,而IGS(International GNSS Service)發布的全球電離層地圖(Global Ionospheric Maps,GIM)要滯后數天,無法做到實時電離層改正[3]。當下全國各省市都已建立起高精度的連續運行參考系統,其密集的基準站觀測數據能夠提供區域內高精度的電離層信息,為實時PPP電離層約束提供良好的基礎。張瑞等利用低階球諧函數擬合區域電離層延遲,為流動站提供電離層延遲改正,顯著改善了初始精度和收斂速度[4]。許承權等利用神經網絡的方法,基于武漢CORS建立了區域電離層模型,在單頻PPP靜態時段達到了厘米級精度[5]。但是上述傳統方法都需要通過大量數據建立區域模型,計算量較大,且模型精度容易受到站點分布的影響。本文利用某市的CORS觀測站數據計算電離層延遲,并基于反距離加權內插方法對流動站上空電離層延遲進行內插,對實時PPP解算進行外部電離層約束,同時與消電離層組合定位結果進行對比研究。
2 精密單點定位
2.1 消電離層組合PPP
消電離層組合的PPP定位方法是利用載波和偽距的組合消掉信號中的一階項[5],具體計算公式為:
PC=ρ+c(δttcv-δtsat)+Tr+MC+εPC
LC=ρ+c(δttcv-δtsat)+Tr+BC+λNw+mC+εLC
(1)
其中PC為偽距觀測值;LC為載波觀測值;ρ衛星和接收機之間的距離;c為真空中的光速;Tr為對流層延遲;εPC為隨機誤差。式(1)中BC和λNW兩項的計算公式為:
BC=λN[N1+(λW/λ2)NW]
λNW=c/(f1-f2)
(2)
其中BC為載波觀測值中的模糊度項,λNW為天線相位纏繞改正項,λN為窄巷波長,λW為寬巷波長,NW為寬巷模糊度,f1和f2為GPS信號頻率。觀測量中的對流層干延遲、潮汐位移誤差、天線相位中心偏差都已經提前得到改正。擴展卡爾曼濾波方法經常用于解算消電離層組合的解算方程。
2.2 非差非組合PPP
傳統消電離層組合PPP算法是利用GNSS(Global Navigation Satellite System)雙頻信號中的偽距觀測值和載波觀測值的線性組合對電離層延遲誤差的一階項進行消除,但是解算過程中忽略了電離層延遲誤差的高階項。該組合會放大偽距和載波觀測值中的噪聲[6]。而非差非組合PPP算法是將觀測信號路徑上的電離層延遲與其他參量一同作為待估值,在不進行觀測值之間的線性組合的情況下求解觀測方程。非差非組合PPP偽距和載波觀測方程為:

+△+εP,i
(3)
(4)
其中,P、L分別為GNSS觀測數據中的偽距和載波觀測值;ρ為衛星和接收機之間的真實幾何距離;c為真空光速;δts、δtr分別代表衛星和接收機鐘差;ρion為電離層延遲,γi為偽距DCB系數,DCBs、DCBr分別為GNSS衛星和地面接收機的硬件延遲,λ、N分別表示載波波長和整周模糊度;△為其他誤差改正,包括對流層延遲、天線相位中心偏差、地球自轉、相對論等;εP、εL分別代表偽距和載波觀測值中的隨機噪聲。
3 反距離加權電離層延遲內插方法
反距離加權內插方法的原理是基于待插點與區域內其他點的相關性與距離成反比的假設,利用待插點區域內已知點的屬性值加權平均計算得到[7]。該方法是地理數據信息研究中最常用的方法。在一定范圍內的電離層中,電子密度三維結構及總電子含量具有較強的相關性,通過周圍一定數量觀測站的電離層延遲可以反映出整個區域的電離層狀態。因此,利用周圍幾個站的觀測數據能夠實時插值出流動站的電離層延遲。其計算公式如下:
(5)
其中Z′(x0)為內插點,Z(xi)為內插點周圍已知點數據值;λi為周圍已知點的權重,計算公式為:
(6)
其中di為第i個已知點與內插點之間的距離,k為冪指數。
4 實驗結果
本文采用某省的CORS網絡中的6個站進行實驗,其中5個站作為固定站,1個站作為流動站,進行消電離層組合PPP定位和反距離加權電離層內插約束的非差非組合PPP定位對比。圖1給出了這6個站的分布示意圖,其中藍色三角形為固定站,紅色圓形為流動站。從圖1中可以看出,固定站分布在流動站周圍,能夠取得較好的電離層內插結果。
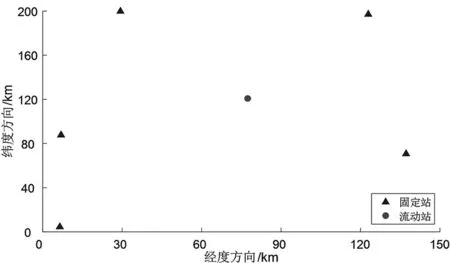
圖1 測站分布圖

圖2 E方向定位結果對比圖
首先利用載波相位平滑偽距的方法實時計算周圍固定站的垂直方向總電子含量(Vertical Total Electron Content,VTEC),然后按照前文敘述的反距離加權內插的方法對流動站上空VTEC進行內插,獲得高精度的電離層延遲信息[8,9]。然后將電離層延遲作為已知值代入到非差非組合解算方程中,加快PPP收斂速度和定位精度。為了對比分析,同時也利用消電離層組合的方法計算流動站定位結果。
圖2給出了消電離層組合和非差非組合PPP的E方向的定位結果對比,從圖中可以看出,非差非組合PPP在初始歷元的誤差很小,后面隨著時間推移,定位誤差越來越大,在30歷元左右時開始收斂,誤差逐漸減小,后面達到毫米級精度。而消電離層組合PPP在初始歷元誤差就比較大,隨著時間推移誤差不斷波動下降,但是其誤差始終顯著大于非差非組合PPP誤差。在60個歷元左右,兩種定位方法精度達到同一水平。
圖3給出了N方向兩種定位方法的對比圖,從圖中可以看出,非差非組合PPP的定位誤差在初始歷元比較大,在 0.1 m左右,然后誤差快速降低,但是在降低過程中有較小的波動。而消電離層組合PPP定位誤差在初始歷元達到 1.5 m左右,并且誤差波動很大,在60歷元以后兩者都達到較高精度。

圖3 N方向定位結果對比圖
圖4給出了U方向的對比結果,其中非差非組合PPP的初始精度較高,但是隨著時間推移,定位結果逐漸偏離,在20歷元左右達到 0.3 m的誤差,隨后不斷波動下降,在140歷元左右收斂。而消電離層組合定位誤差在初始歷元達到 -1.5 m左右,并且也在20歷元左右出現了較大誤差波動,隨后逐漸減小,在180歷元左右收斂。

圖4 U方向定位結果對比圖
5 結 論
基于區域CORS網絡的實時PPP定位方法對于位置服務、交通物流等具有重要研究意義。本文利用某省部分CORS站點數據對基于反距離加權內插法的電離層約束非差非組合PPP定位方法進行了研究,并于傳統消電離層組合方法進行了收斂速度和定位精度的對比分析。由于傳統消電離層組合算法只是消去了一階電離層延遲項,剩余高階項在定位中放大了載波和偽距的噪聲。而電離層約束非差非組合PPP將電離層延遲當作未知數準確地估計出來,這樣就精確消除了電離層延遲的影響。結果顯示,反距離加權內插法的電離層約束非差非組合PPP收斂速度優于消電離層組合的方法,并且初始定位精度較高,波動性很小,能夠滿足交通、導航等實際需求,具有較好的應用前景。在周圍參考站距離較遠,且空間天氣較為活躍,如發生磁暴時,該算法的精度可能會受到一定程度的影響,需要進一步驗證和改善。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
