無人機1∶500比例尺測圖關鍵影響因素分析及應用研究
2020-01-14 06:55:20萬雷黃維任宏旭喻守剛
城市勘測 2019年6期
關鍵詞:模型
萬雷,黃維,任宏旭,喻守剛
(1.長江空間信息技術工程有限公司(武漢),湖北 武漢 430010; 2.長江三峽勘測研究院有限公司(武漢),湖北 武漢 430074)
1 引 言
無人機作為一個新興的載體,在傳統農林作業、工業測量和土地資源調查、智慧城市、數字考古、搶險救災、三維實景、城市規劃、新農村建設、物流配送、地理國情監測等應用中保持強勢增長[1]。無人機低空遙感數字航空攝影測量系統已經成為獲取地形測量數字成果的重要手段之一,無人機機動靈活、高效快速,無須專用機場起降,可進行手拋起飛、彈射起飛和傘降、滑降以及垂直起降等多種方式,并且基于無人駕駛系統,回避了飛行員人身安全的風險[2~4],因而在小區域和人工作業困難地區快速獲取高分辨率影像具有明顯優勢。隨著無人機硬件技術和高精度GNSS定位技術的發展,將高精度GNSS定位模塊應用到無人機上,結合GNSS輔助空中三角測量技術,不但可以有效減少像控點的數量甚至免像控,且可以大大提高無人機航測的精度[5]。田超等人的研究,表明拓普康天狼星Pro航空測圖系統提供了在無地面控制點條件下可全自動生成DSM的一體化解決方案,且在影像地面分辨率優于 5 cm時,可滿足 1∶500測圖規范精度要求[6]。何秀慶利用天狼星無人機免像控技術進行地形圖測量及精度分析,生產的DLG平面和高程中誤差均為 0.15 m,滿足 1∶500測圖精度要求[7]。這一系列研究均表明,在一定條件下,無人機航測可以滿足 1∶500大比例尺測圖精度要求。本文重點對影響無人機測圖精度的關鍵因素進行分析,探討保證測圖精度的措施,并結合國產飛馬F300無人機航測系統,進行 1∶500比例尺成圖試驗研究。
2 影響無人機測圖精度的關鍵因素分析
本文從影響無人機測圖精度的關鍵因素進行分析,并探討提高成圖精度的有效措施。
2.1 影像質量
影像質量包括影像清晰度、ISO、影像地面分辨率等參數。影像清晰度越高,地物判讀越準確,影像特征點提取和匹配更可靠,空三精度越高。影像清晰度與飛行時天氣狀況能見度直接相關,要保證高的影像清晰度,應避免霧、霾等天氣不佳的情況下飛行。此外,由于無人機處于高速運動中拍照,會帶來像點位移,像點位移會降低影像解析能力,影響判讀精度[8]。像點位移公式為:
δ=v×t/GSD
其中,δ為像點位移,v為飛機運行速度,t為相機曝光時間,GSD為影像地面分辨率。為了減少像點位移,應縮短曝光時間。規范規定像點位移一般不應大于1個像素,最大不應大于1.5個像素。在大比例尺測圖應用中,為了保證影像的高解析度,根據經驗,應將像點位移控制在1/3像素[9,10]。目前,市面上的電動固定翼無人機巡航速度一般為 18 m/s左右,假定設計地面分辨率為 5 cm,則為了控制像點位移,應在保證影像曝光足夠的情況下,盡量縮短曝光時間,在本例中不超過 1/1080 s,通常設置為 1/1250 s。
ISO應根據飛行時光照情況進行調整,光照條件越好,ISO可設置越低。ISO值越高,影像噪點越多,建議ISO設置為320~600,當光照條件不好時,ISO值設置得過高,影像質量也會差。因此,應選擇光照條件好的時候進行航拍,保證影像質量。
影像地面分辨率與航高直接相關,它們之間的關系如下式:
其中,H為航高,f為相機焦距,GSD為影像地面分辨率,μ為CCD像元大小。影像分辨率越高,判讀精度就會越高,在影像空三處理和測圖中精度越高,但是會降低航攝效率。根據規范要求, 1∶500航測法成圖要求航攝地面分辨率優于 8 cm,為了同時兼顧成圖精度和航攝效率,根據經驗, 1∶500無人機航測成圖時,一般設計影像地面分辨率為 4 cm~5 cm。
2.2 飛行姿態
飛行姿態包括飛機航拍作業時的俯仰角、橫滾角和航偏角,即航攝影像的外方位角元素[11]。飛行姿態與飛機飛行狀態和飛行時風速極大相關。在飛行器自身穩定性較好的情況下,影響最大的就是風。有風時會導致飛機為了抵消風的影響而作出相應的反饋,飛機的姿態就會發生較大變化,尤其是風向多變的情況下,飛機姿態更不穩定,這樣容易引起航拍影像拍攝姿態角過大而導致重疊度不夠。重疊度不夠,影像匹配容易失敗,形成航攝漏洞或連接性不夠,且拍攝姿態角過大,容易造成影像畸變更大,帶來大的模型差。無人機大比例尺航測成圖應用中,應選擇穩定的飛行平臺,風速過大或風向多變的天氣情況下,不適宜航拍作業。風速超過三級,非緊急情況盡量不作業。
2.3 地面控制和機上POS
地面像控點布設的好壞對最終空三加密的精度起著至關重要的作用。傳統航測布點為區域網布點方案[12],參照規范要求的基線間隔和航線間隔布設平面和高程控制點,像控點布設的密度和均勻性對平差的精度影響重大。GNSS輔助空三的引入可以有效減少像控點的數量且可以大大提高無人機航測的精度。在影像曝光點坐標精度足夠高的情況下甚至可以免像控[13]。隨著衛星導航定位技術的發展,定位設備可以做得足夠輕巧且精度高,可以與無人機進行很好地結合。目前無人機裝配的差分系統一般包括地面基準站和機上流動站兩部分,差分解算的方式主要包括RTK實時差分解算和PPK后差分解算。飛馬F300無人機航攝系統同時裝配了RTK實時差分和PPK后差分系統,二者進行融合解算可以使影像曝光點坐標精度達到 5 cm~10 cm。
2.4 畸變模型
目前多數無人機由于體型小、載荷有限,多搭載輕小型非量測普通相機作為影像獲取裝備,常用于無人機搭載的相機有SONY a7r、SONY黑卡、Nikon D810等,這類非量測相機往往存在相機畸變大、焦距短、像幅小等問題。而對于目前的硬件搭載水平一定的條件下,對測圖精度影響很大的就是相機畸變。如果相機畸變不能有效去除,會直接導致空三無法滿足精度要求、立體像對模型差大、接邊工作量增大,也難以滿足 1∶500比例尺測圖的需要。因此如何準確地模擬相機畸變信息是解決無人機高精度立體測圖的一個關鍵因素。
像片中心畸變小,邊緣畸變大,常見的多項式畸變模型由k1、k2、k3、p1、p2、α和β組成[14],模擬相機的徑向畸變、切向畸變和像素的非正方形比例因子,滿足相對規則的相機畸變去除;但多數非量測相機畸變不規則。針對此特點,飛馬機器人開發了基于格網畸變的模型算法,能有效減小模型差等問題,提高航測成圖精度。
格網畸變的原理是將相機成像CCD元件視作規則格網組成,每400×400像素作為一個格網,逐塊格網模擬相機畸變。采用室內亞毫米級高精度三維檢校場,對相機進行精密檢校,其格網畸變的獲取如下:
(1)使用平行光管進行相機對焦,保證鏡頭無窮遠對焦的準確性。
(2)多片聯合檢校。在檢校場不同位置進行影像的拍攝,并通過多片聯合檢校解算出準確的格網畸變參數,既保證檢校精度,又有效地避免了過擬合。格網畸變可準確量化不規則相機的畸變信息,從而實現高精度數據成圖。飛馬機器人公司對該畸變模型進行了充分的精度對比測試,表明該畸變模型精度明顯優于傳統畸變處理結果,且其精度可提高一倍,有效地解決了非量測性相機畸變不規則無法應用于高精度航測成圖的問題。室內檢校場和格網畸變模型示意如圖1、圖2所示。

圖1 室內三維檢校場
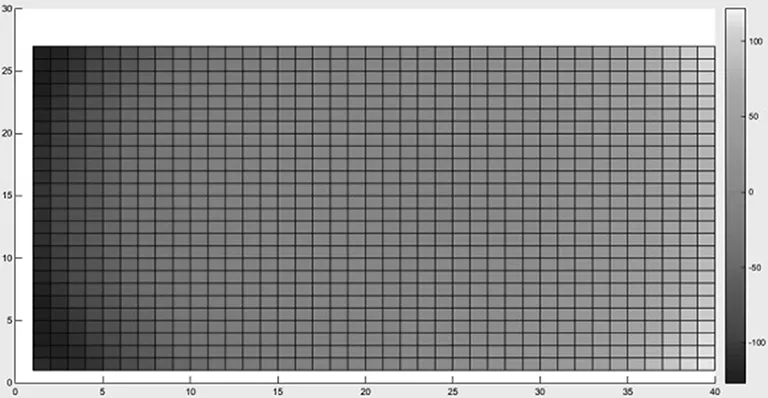
圖2 格網畸變模型示意圖
3 無人機1∶500比例尺測圖試驗
3.1 飛行平臺和搭載傳感器
本研究中所用飛行平臺為飛馬F300電動固定翼無人航攝系統,機身采用超輕泡沫材料,采用手拋起飛和傘降的起降方式。無人機配備了RTK實時差分和PPK后差分系統,支持GPS和北斗衛星導航數據,機上接收機采樣頻率高達 50 Hz,保證了很高的數據解算精度。飛行平臺主要性能參數如表1所示。

飛馬F300航攝系統主要性能參數 表1
本航攝系統搭載的航測模塊為SONY DSC-RX1R Ⅱ相機,相機出廠前由廠家進行格網畸變模型檢校提供使用。
3.2 測區概況
本研究中選取三個不同地形區域進行試驗,三個測區概況如表2所示。
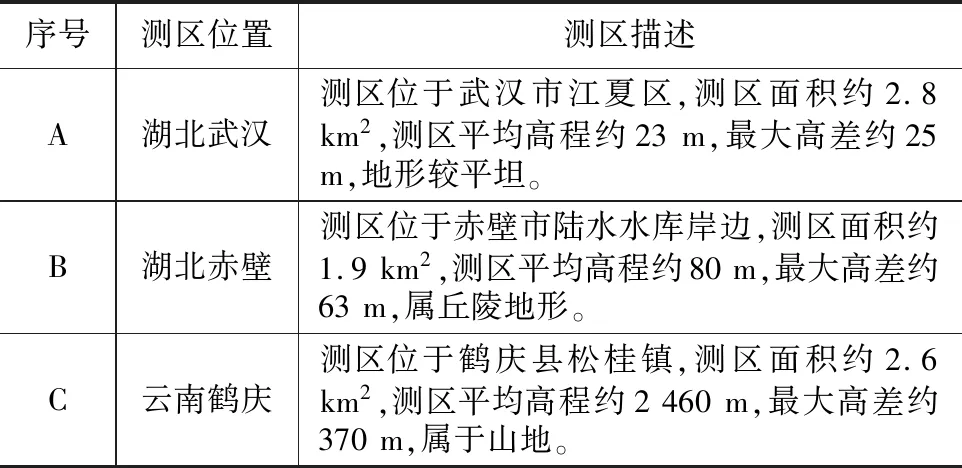
測區概況 表2
3.3 航空攝影數據獲取
根據三個測區地形情況設計航線,A和B測區一個架次飛行,C測區由于高差較大,根據實際地形情況,劃分為兩個架次變高飛行,兩架次航高相差 190 m,保證測區足夠重疊。在能見度高、光照條件好、風速低于三級的天氣情況下獲取航拍影像。影像清晰、反差適中,無明顯噪點。獲取影像情況如表3所示,從表中可知,影像航向重疊度和旁向重疊度均大于65%和40%的要求[15],保證了高的重疊度,C測區屬于山區地形,落差大,航線設計時加大了旁向重疊度,保證強的連接性。影像姿態均較好,俯仰和橫滾角超過5°的影像數量較少。

影像獲取情況 表3
3.4 影像處理
數據獲取后分架次進行整理,首先利用差分解算模塊進行PPK/RTK融合解算,獲得精確的曝光點坐標,然后基于格網畸變模型對原始影像進行初始畸變糾正,之后在智拼圖模塊按測區建立工程,進行空三加密解算。A測區地形平坦,且影像分辨率很高,直接進行免像控空三解算。B、C測區采用四個角點布設平高控制點,GNSS輔助空三解算,解算后像控點殘差為:B測區平面中誤差為 0.05 m,高程中誤差為 0.06 m,C測區平面中誤差為 0.06 m,高程中誤差為 0.08 m,滿足《數字航空攝影測量空中三角測量規范》(GBT 23236-2009)中1∶500比例尺空三加密精度要求。
3.5 模型精度檢查
空三加密后,將加密成果導出,在數字攝影測量工作站導入,恢復立體模型。采用GNSS RTK實測采集的外業數據,導入模型進行平面位置和高程精度檢查。選取的平面檢查點主要為提前布設的標志、道路標線、規則人工地物角點等,高程檢查點為道路、農田、荒地等裸露區域的高程散點。
為了驗證格網模型的精度,本次試驗還將傳統畸變模型和格網畸變模型的空三成果分別恢復立體進行模型精度檢查和模型接邊差的比較。三個測區的檢查點數量和兩種畸變模型下檢查精度情況如表4所示。

兩種畸變模型下模型精度檢查統計 表4
所有檢查點在兩種空三成果模型上最大接邊差均值統計如表5所示。

兩種畸變模型下檢查點最大模型接邊差統計 表5
從以上表中可看出,采用格網畸變模型后,模型精度均得到了很大提高,尤其是高程精度,提高了一倍多,且最大模型接邊差均縮小了。采用格網畸變后立體模型精度明顯優于傳統畸變模型結果且三個測區檢查點平面和高程中誤差均滿足《基礎地理信息數字成果1∶500 1∶1000 1∶2000數字線劃圖》(CH/T9008.1-2010)1∶500比例尺DLG成果平面位置中誤差和高程中誤差要求。
4 結 語
本文對無人機1∶500比例尺測圖的關鍵影響因素進行分析,討論保證測圖精度的措施,并基于飛馬F300無人機航攝系統(裝配高精度RTK/PPK定位模塊),選取三個不同地形試驗區,進行1∶500比例尺成圖生產試驗,結果表明在成像條件好,影像地面分辨率優于5cm,風速小、飛行姿態好,影像重疊度高的情況下,在無控或稀少控制點情況下,GNSS輔助空三可以達到1∶500大比例尺測圖精度要求,同時也表明了文中應用的格網模型具有很高的精度,可以有效去除影像畸變,減小模型差。山區由于地形起伏大,高程誤差相比平坦地區會增大,但仍滿足規范要求。對于山區,可以通過提高重疊度、分區塊變高航飛的方式保證成圖精度。無人機航攝系統應用于大比例尺測圖,相對傳統全野外測量方式,可以大大減少外業測量工作量,極大提高工作效率,具有重要實際意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
