一種用于接力賽的NAO機器人比賽系統設計
2020-01-08 02:06:04
測控技術 2019年12期
關鍵詞:比賽
(東南大學 儀器科學與工程學院,江蘇 南京 210096)
NAO是在世界學術領域內運用廣泛的類人機器人。例如運用NAO機器人對自閉譜系障礙兒童進行干預治療[1];運用NAO機器人開發人臉識別系統[2];運用NAO機器人平臺設計高爾夫比賽系統[3];運用NAO進行中文語音識別等[4]。本文根據NAO機器人的仿人結構設計了一種機器人接力比賽系統。NAO可以通過攝像頭識別賽道,并根據身體與賽道的角度判斷轉彎方向及角度;根據轉彎角度變化來進行速度調整;同時通過多協同合作,在第一臺NAO機器人即將走向終點時向同伴機器人發送信號,同伴NAO機器人即接收信號并準備啟動。以上所述策略保障了整個比賽的順利進行。
1 NAO機器人基礎硬件平臺
硬件方面,NAO機器人[5]本身是一個標準平臺,它全身有25個自由度,可以完成一些較為復雜的動作,NAO機器人下肢關節具有 12 自由度,其髖、 膝、踝關節分別為 3、 1、 2 自由度,左右對稱。頭部搭載兩個攝像頭;在雙腳、雙手等部位配有壓力傳感器可以檢測是否碰到障礙物;胸前有超聲波傳感器可以用于檢測前方的障礙物避免碰撞。在比賽中機器人視覺的作用至關重要,NAO機器人搭載的攝像頭可以實現最高30幀/秒的YUV422圖像,分辨率為640像素×480像素。機器人水平視野范圍為47.8°,垂直視野范圍為36.8°。
NAO機器人接力賽為比賽模擬人類接力賽項目,其競賽形式為: 2臺NAO機器人接力競步,每臺機器人行走6 m,最終成績按照用時由少到多排序。比賽場地總長、寬分別為6 m和4.8 m,分為3組賽道;每組賽道包含去程賽道,回程賽道各一條,單條賽道為長、寬分別為6 m和0.8 m的賽道;單條賽道4個邊噴涂有寬5 cm白色邊界線;場地地面為綠色,場地表面的材料為薄地毯面料。
2 接力賽軟件系統設計
在上述規則和機器人軟硬件限制的基礎上,本文提出了一種主要基于機器人單目視覺的比賽策略軟件系統。該系統主要在Linux系統上進行編程[6],分模塊設計實現了機器人接力比賽中幾個主要步驟。具體步驟詳見圖1系統軟件設計流程圖。
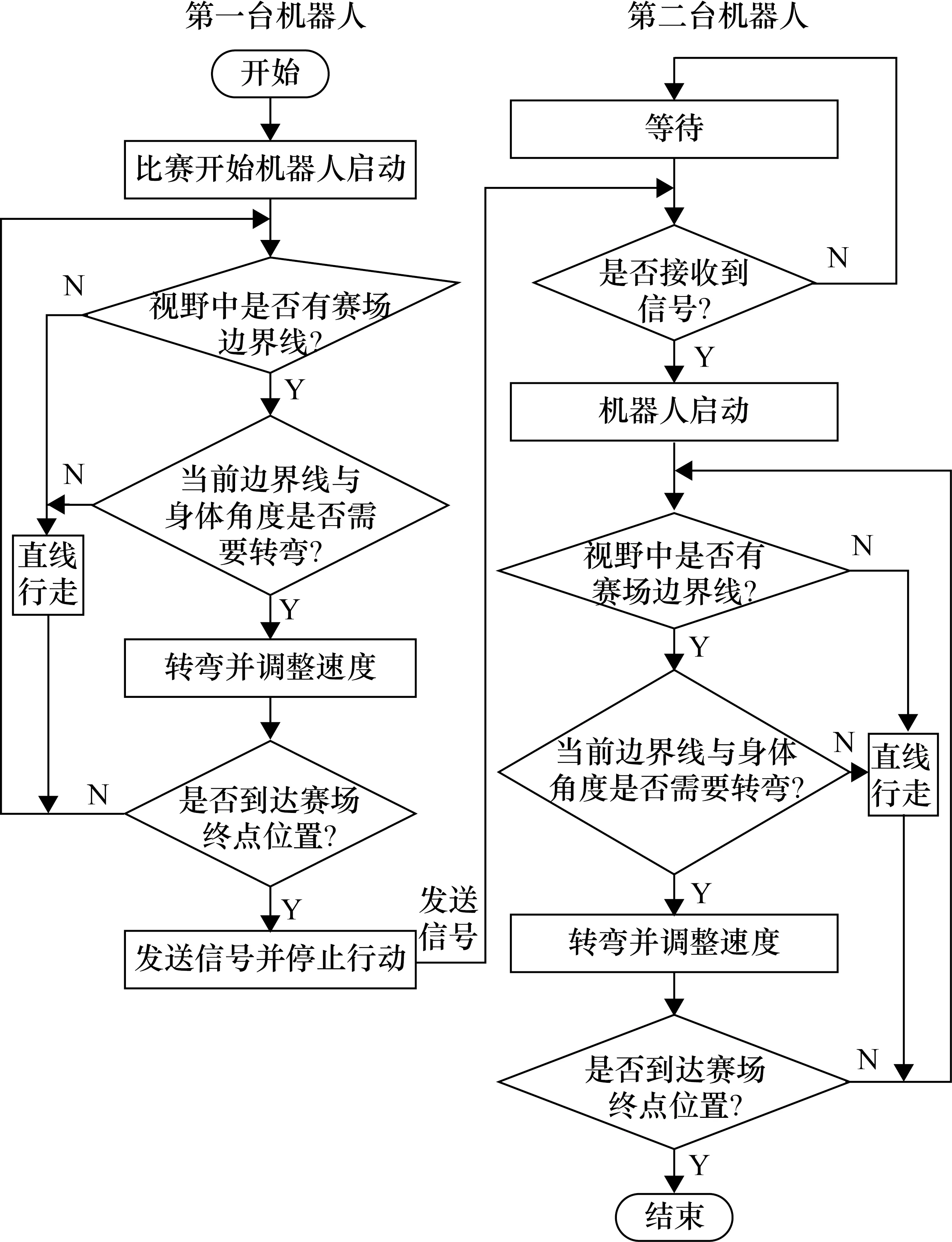
圖1 系統軟件設計流程圖
2.1 NAO機器人啟動模塊
NAO機器人的啟動有兩種方案可供選擇。
方案1:NAO機器人胸前有聲吶裝置,利用超聲波避障功能啟動NAO機器人。當胸前有擋板障礙物時NAO機器人等待啟動,障礙物撤離比賽開始,NAO機器人開始行動。
方案2:比賽開始,裁判吹響哨聲。NAO機器人聽到哨聲即開始啟動。
兩種方案各有利弊,方案1由于NAO機器人機械結構原因存在短暫延時問題,但該方案穩定性好,移開擋板NAO機器人啟動;方案2時效性好,聲音的傳播速度快,NAO聽到哨聲即啟動,不會產生啟動延時問題,但在環境嘈雜時,可能存在無法聽到裁判哨聲的情況。
2.2 賽場位置識別及圖像處理模塊
在接力賽中,NAO機器人主要通過視覺識別白色的賽場邊界。機器人拍攝到的賽場輪廓如圖2(a)所示。
在機器人掃描周圍環境時,檢測到白色直線的特征物體后即進行顏色提取與轉化,通過顏色提取來獲得符合白色閾值條件的像素點[7-8]。經過以上處理之后賽場邊緣輪廓如圖2(b)所示。
由圖2(b)可知,此時圖片噪聲較大,圖片中左上角有許多白色噪聲點,圖片右上角有其他賽場邊緣線。此時機器人無法判斷正確的賽場邊緣線。本策略對該圖片進行濾波處理,并采用霍夫變換和canny邊緣算法進行邊緣檢測,獲得并繪制圖像輪廓。圖像輪廓如圖2(c)所示。計算圖中各輪廓的長度,將長度較長的直線輪廓(圖2(c)中線條1)作為賽場邊緣線。
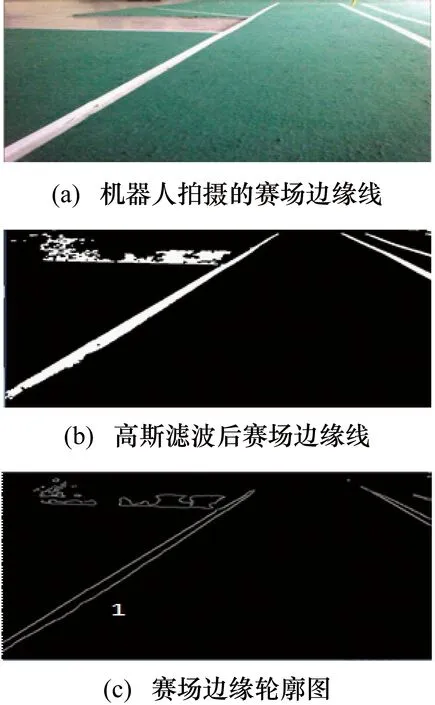
圖2 賽場邊緣圖像
2.3 基于賽場識別調整機器人轉向及轉速模塊
基于賽場識別調整機器人轉向及轉速模塊的初步方案(方案1)為:將識別并處理過的賽場邊緣白線置于機器人視野中心,再判斷機器人頭部與身體之間的夾角,根據夾角判斷是否需要轉向。因賽場邊界線可近似認為是一條無限長的直線,故將賽場邊界線置于視野中心,則機器人視野與賽場邊界線必垂直。此時判斷機器人頭部與身體之間的夾角。如圖3所示。
該圖為俯視角度,實線為賽場邊緣白線,圓形為機器人,虛線1為機器人攝像頭看向賽場邊緣線的視線,虛線2為機器人身體前進方向。θ為機器人攝像頭方向與前進方向夾角,若0°<θ<90°,則系統判斷為機
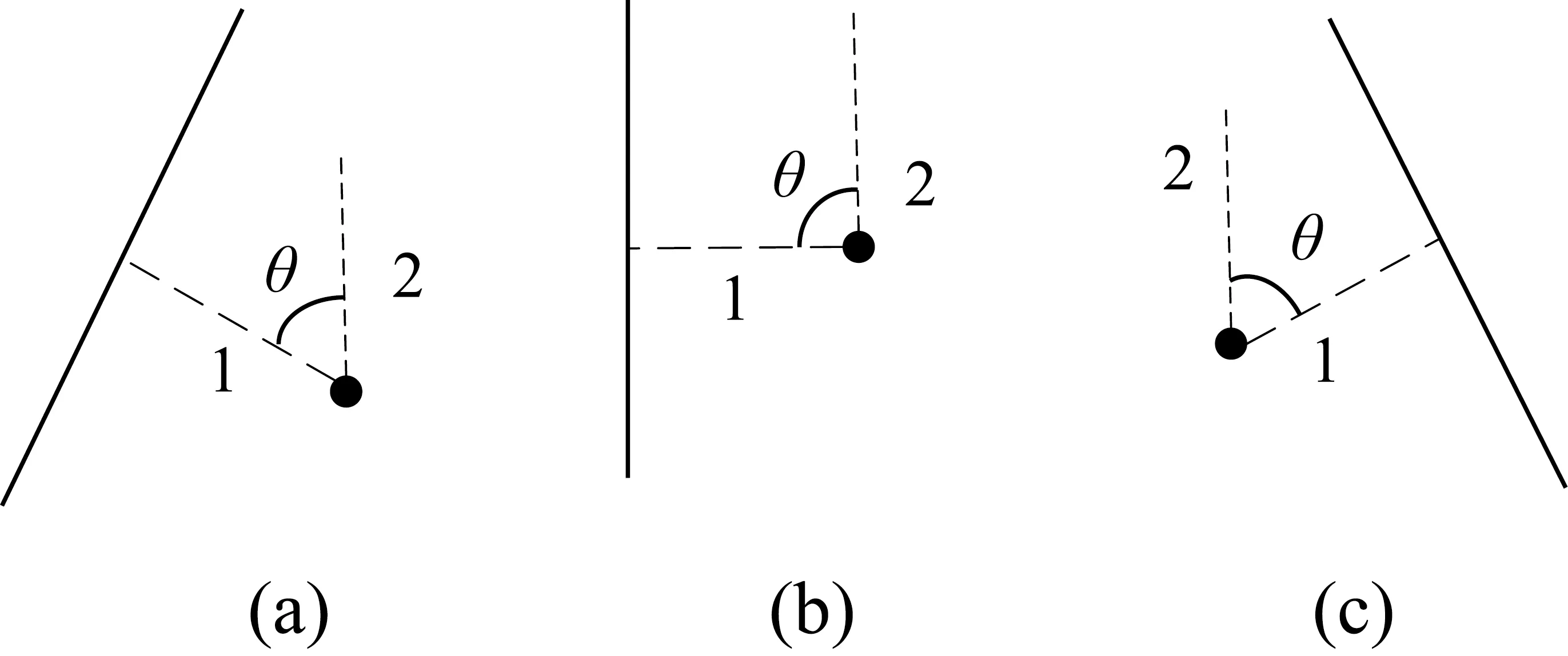
圖3 機器人與賽場邊緣線位置俯視圖1
器人偏左走,需要向右調整方向。反之,若-90°<θ<0°則系統判斷為機器人偏右走,需要向左調整方向。當θ=90°或θ=-90°時,則系統判斷為機器人前進方向正確,不需調整方向。
在接力賽比賽過程中,機器人獲取圖像為動態過程且為實時獲取圖像,但由于機器人步速及步態限制,機器人調整轉速需要一定的時間,若轉速調整過大,則易發生過量調整問題。故本方案采取多次調整策略,即調整多次轉速但每次調整轉速值較小。
本方案根據上述θ的大小判定轉速調整。當60°<|θ|<90°時,轉角調整1°/s;當30°<|θ|<60°時,轉角調整5°/s;當5°<|θ|<30°時,轉角調整10°/s;當0°<|θ|<5°時,機器人前進方向與賽場邊緣線接近垂直,此時,可判定為機器人到達賽場終點。
但將該方案應用在接力跑時,因為機器人頭部不斷擺動,大大降低了機器人跑步的速度。故本文提出方案2:如圖4所示,實線1、實線2為賽場邊緣白線,圓形為機器人,虛線3為機器人預設前進方向。機器人頭部固定不動,視野為正前方。θ1和θ2分別為機器人看向左右兩條賽場邊界白線的夾角。易知,當機器人行走方向始終沿虛線3方向行走時,θ1和θ2大小相同。而當機器人偏向右邊時,θ1>θ2;當機器人偏向左邊時,θ1<θ2。故可通過判斷θ1和θ2的大小關系來判斷機器人是否需要調整轉向。與方案1相同,方案2采取多次調整策略,調整多次轉速但每次調整轉速值較小。
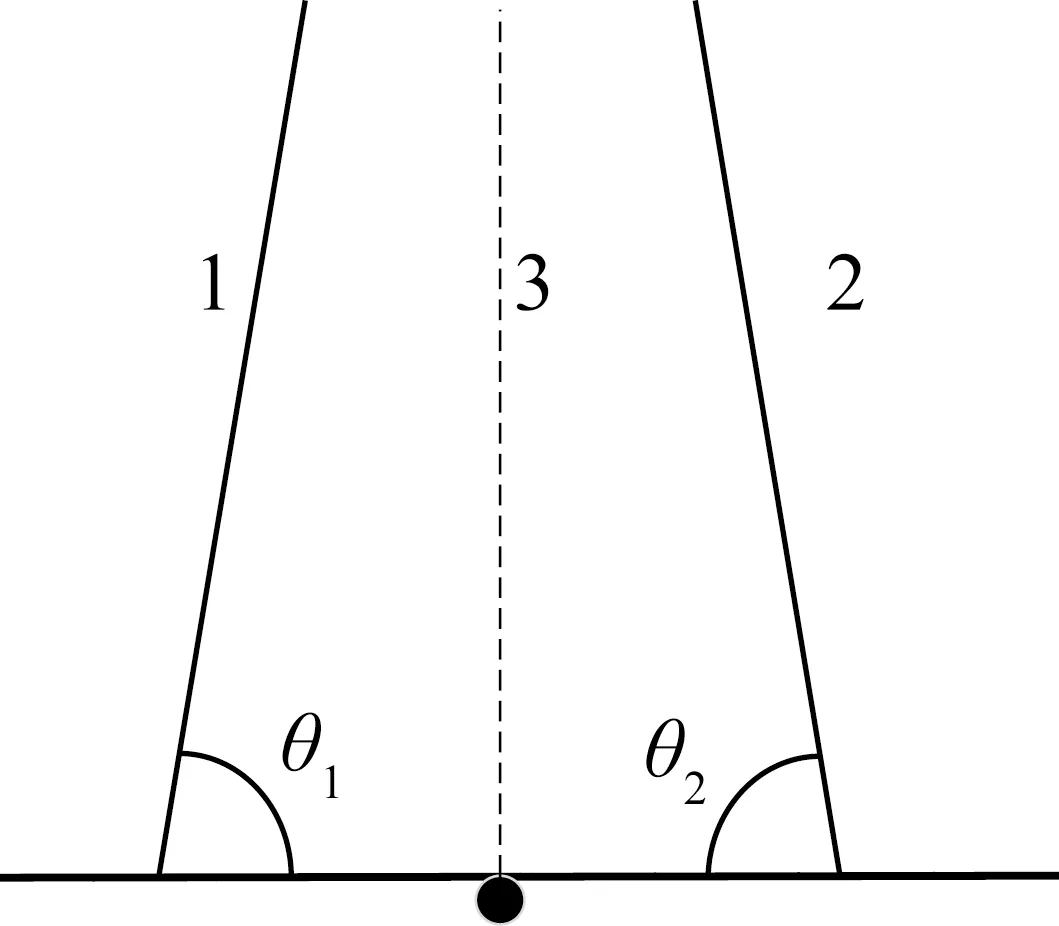
圖4 機器人與賽場邊緣線位置俯視圖2
本方案根據上述θ1和θ2的大小關系判定轉向及轉速調整,θ1>θ2時機器人向左偏轉;θ1<θ2時機器人向右偏轉。并且當 0°<|θ1-θ2|<5°時,轉角調整1°/s;當5°<|θ1-θ2|<10°時,轉角調整5°/s;當10°<|θ1-θ2|時,轉角調整10°/s。
將方案2應用到接力跑中,機器人減少了頭部動作,接力跑穩定性得到提升,跑步速度也大大提高。
轉向調整方案1與方案2的速度對比在本文第4小節示出。
2.4 NAO機器人接力模塊設計
圖5(a)為機器人拍攝的賽場圖,經過2.2節圖像處理后簡化為圖5(b)所示的模型圖。如圖5(b)所示,該圖為俯視圖,圓形為機器人所在位置,直線為賽場邊界線,虛線1為機器人看向賽場邊界線的視線,θ為機器人視線與機器人前進方向夾角,若85°<θ<95°,則系統判斷為機器人即將到達賽場終點,第一臺機器人繼續前進5 s后結束運行,并向第二臺機器人發送啟動信息。

圖5 機器人與賽場邊緣線位置俯視圖3
利用Socket通信[9]實現NAO機器人之間的接力通信。Socket是應用層與TCP/IP協議族通信的中間軟件抽象層,它是一組接口。在設計模式中,Socket其實就是一個門面模式,它把復雜的TCP/IP協議族隱藏在Socket接口后面,對用戶來說,一組簡單的接口就是全部,讓Socket去組織數據,以符合指定的協議。
當第二臺機器人接收到第一臺機器人發送的啟動信息后,開始啟動,并按照上文所述策略繼續運行。根據2.2節所述策略進行賽場位置識別及圖像處理,根據2.3節所述策略基于賽場識別對機器人轉向及轉速進行調整,當第二臺機器人到達終點時,停止運行,比賽結束。
3 NAO機器人步態規劃
雙足機器人步態規劃主要有三次樣條插值法與逆運動學求解法。
3.1 三次樣條插值法
步態方案1采取三次樣條插值方法來規劃NAO機器人行走步態[10],根據關鍵時刻主要節點的位姿來規劃NAO機器人在整個步態周期的運動軌跡。圖6為機器人行走過程中,下肢的行走模型。

圖6 機器人下肢模型
NAO機器人在行走過程中的單個步態周期為雙腳支撐-左(右)腳支撐-雙腳支撐-右(左)腳支撐-雙腳支撐。為使規劃出的軌跡平滑,在保持位移和速度連續性的同時,還要保證加速度的連續性。本文通過選取NAO機器人行走過程中關鍵時刻的位移、速度、加速度等狀態,采用三次樣條插值方法對未知時刻狀態進行插值計算,規劃出機器人單個步行周期的狀態值,從而得到NAO機器人的期望運動軌跡。對機器人單個步態周期進行插值處理,選取插值函數:
(1)
式中,f(t)于各節點的值是f(ti)=fi(i=0,1,2,…,n);hi=ti+1-ti(i=0,1,2,…,n)。M0,M1,…,Mn滿足線性方程組:
(2)
再補充:
S′(t0)=M0,S′(tn)=Mn
(3)
將式(2)與式(3)聯立,解得M0,M1,…,Mn的值,再將結果代入式(1),故可解得S(t)的表達式即為NAO機器人運動軌跡。
3.2 逆運動學求解法
由于機器人在接力跑時,只需要進行前進和左右轉的簡單操作,不需復雜的步態規劃,故步態策略設計了步態方案2:采取逆運動學求解法[11]。圖7顯示了機器人行走過程中軀干、髖關節、大腿和腳4個坐標系。

圖7 機器人下肢各坐標系
規定對于同一個點,在M坐標系的位置記為pM,在N坐標系中的位置記為pN,同一點由M坐標系到N坐標系的轉換矩陣記為M2N。為方便計算,將軀干坐標系記為A坐標系,將髖關節坐標系記為B坐標系,將大腿坐標系記為C坐標系,將腳坐標系記為D坐標系。

故機器人膝蓋關節的角度可計算為
式中,l1為機器人膝蓋上方腿的長度;l2為機器人膝蓋下方腿的長度;ldis為B2A平移向量的長度。
機器人腳相對于機器人膝蓋上方腿的俯仰角可以計算為
而機器人腳部的俯仰角可計算為
式中,x,y,z為腳坐標系對髖關節坐標系(D2B)的平移分量。
故機器人膝蓋上方腿的俯仰角(pitch)(在腳坐標系中)為
θpitch=β+γ
機器人腳的滾動角度(roll)可計算為
又B2C=C2D-1·B2D,C2D=Rotx(δ)·Roty(θpitch·Transz(l2)·Roty(α)·Transz(l1)。
故由已知的髖關節參數(偏航角yaw(z),滾動角roll(x),俯仰角pitch(y))構造出旋轉矩陣:
RotHip=Rotx(δx)·Roty(δy)·Rotz(δz)
其中,ci為cos(δi);si為sin(δi)。故
其中,rij為矩陣第i行第j列的值(i,j從零開始計數)。
至此,求出了所有關節角。
步態規劃模塊方案1與方案2的速度對比在本文第4小節示出。
4 實驗分析
對2.3節調整轉向模塊方案1、方案2與第3節步態規劃模塊方案1(三次樣條插值法)、方案2(逆運動學求解法)進行實驗對照及數據分析。測量不同方案機器人跑步的速度。在同樣的跑道上用同樣的兩臺機器人跑完接力賽全程,得出的跑步時間如表1所示。表中SiTj指調整轉向模塊方案i,步態規劃模塊方案j。
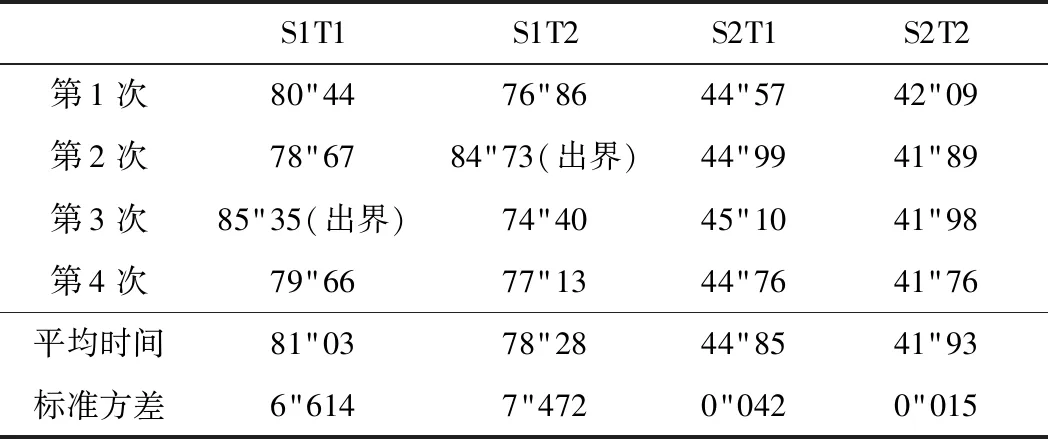
表1 不同方案跑步時間測量
對表1進行分析,在調整轉向方面,將表中第2、3列與第4、5列數據相比較,發現采用調整轉向模塊方案1時,機器人接力賽存在出界情況,而采用調整轉向模塊方案2不存在出界情況,調整轉向方案2比方案1穩定性高;且采用調整轉向模塊方案2時,機器人跑步速度得到大大提升,故本策略采用調整轉向方案2。在步態規劃方面,將表中第4列與第5列數據相比較,發現方案1與方案2都不存在出界情況,且方差都較小,穩定性都較高,機器人跑步的平均速度都較快;但相比較于步態規劃模塊方案1,方案2方差更小速度更快。故本文策略采用步態規劃模塊方案2。
5 結束語
所設計的NAO機器人接力賽系統可以讓機器人自主完成識別賽場邊界線并根據邊界線位置調整自身轉向及轉速,使NAO機器人能夠在比賽過程中在規定賽場邊界中行走,并自主判斷賽場結束位置,使得比賽能夠正確高效進行。實驗表明該系統運行效果良好,并在“軟銀機器人杯”2018中國機器人技能大賽中獲得一等獎。
該比賽系統從Socket通信原理入手,解決了機器人通信的問題,為機器人協同合作提供了新思路。同時該比賽系統對機器人步態做出了詳細解讀,與其他機器人步態相比,該比賽系統設計的步態運行更穩定且速度更快,對雙足機器人的步態研究進行了補充。同時這個比賽也存在許多不足。比如場地的設計過于簡單,對機器人賽者運用機器人進行路徑規劃的能力考驗的不夠。
在本文策略的設計上,今后可以在如下方面進行進一步改進:① 該比賽策略注重于對于實時情況的反應比如轉向及調整轉速,但是缺少對于比賽全局的考慮;② 在進行Socket通信時,也存在短暫延時問題,對于比賽時間有一定的影響。
猜你喜歡
小獼猴智力畫刊(2022年4期)2022-05-23 13:48:12
環球時報(2022-03-21)2022-03-21 19:19:19
數學小靈通(1-2年級)(2021年12期)2021-12-30 06:28:04
數學小靈通(1-2年級)(2021年5期)2021-07-21 03:08:14
幽默大師(2020年10期)2020-11-10 09:07:10
小學生(看圖說畫)(2019年12期)2019-12-21 01:55:56
大灰狼(2019年4期)2019-05-14 16:38:38
作文成功之路·小學版(2019年11期)2019-01-14 01:57:15
小天使·一年級語數英綜合(2017年10期)2017-10-31 22:30:38
小雪花·小學生快樂作文(2016年11期)2017-01-09 22:11:33
