基于壓縮感知的探地雷達成像算法研究
2020-01-07 11:17:30張永寧薛永剛付曉慶
火控雷達技術 2019年4期
張永寧 薛永剛 陳 皓 李 江 付曉慶
(西安應用光學研究所 西安 710065)
0 引言
探地雷達是一種有效的淺層隱藏目標(巖石、泥土、礫石等材料)探測技術。利用電磁波在地下介質中傳播時遇到存在電性差異的分界面時發生反射,根據接收到的電磁波振幅強度、波形和時間的變化等特征參數推斷地下介質的空間位置、形態、埋藏深度和結構等信息。通常合成孔徑成像要求采集大量的時空數據,通過探地雷達掃描感興趣的區域并且記下空間域反射回來的時間信號。常用的探地雷達成像算法如時域標準反投影算法[2]和距離偏移算法[3],都是利用標量波動方程建立目標函數關系式,從而對目標散射數據進行成像。通常地下潛在目標僅占雷達探測區域很小部分,以上算法為了得到更好的成像效果,按照奈奎斯特采樣率對地下目標反射信號進行采樣,在沒有考慮目標區域所占探測區域很小一部分的先驗知識,其要求探地雷達對目標回波信號進行采樣時,在滿足奈奎斯特采樣定理的條件下,盡量設置高的采樣率,以獲取足夠多的原始成像數據,這些算法導致探地雷達采樣數據量大、硬件設計復雜、測量時間較長。
壓縮感知理論是建立在逼近原理和稀疏信號表示方法基礎上的新研究領域,它充分地利用了雷達目標回波信號結構所具有的稀疏特性,利用欠奈奎斯特率采樣數據的非相關測量實現高維稀疏信號的感知。壓縮感知算法摒棄了原始信號采樣中的冗余信號,并通過連續的時間信號變換處理,得到原始信號的壓縮樣本,最后在雷達數字信號處理中采用優化處理算法來處理壓縮后的原始信號樣本。目前壓縮感知理論在通信、圖像處理、光學、微波成像等眾多領域引起高度關注。本文利用探地雷達探測目標區域具有稀疏性的先驗知識,以壓縮感知為理論基礎,通過對合成孔徑雷達回波信號的稀疏性進行分析,提出了合成孔徑探地雷壓縮感知成像算法。該算法不但能提高探地雷達的成像性能,同時還可以縮短數據采集時間、降低探地雷達采集系統硬件成本,實現了以較少資源實現探地雷達的高分辨率探測成像。
1 壓縮感知的基本內容
當信號在某個變換域上可稀疏表示或者可進行壓縮時,可用與變換矩陣非相干的測量矩陣將變換系數線性投影為低維觀測向量[4],這種系數線性投影法具有重建信號所必需的所有重要信息,通過進一步求解稀疏最優化問題,可以從低維觀測向量精確地重建原始高維信號。
將給定的信號在己知函數集上進行分解形成信號稀疏變換,通過在變換域上表達原始信號,用少量的基函數來準確地重構出原始信號。
RN中的離散信號x[n],n=1,2,…,N表示為
(1)

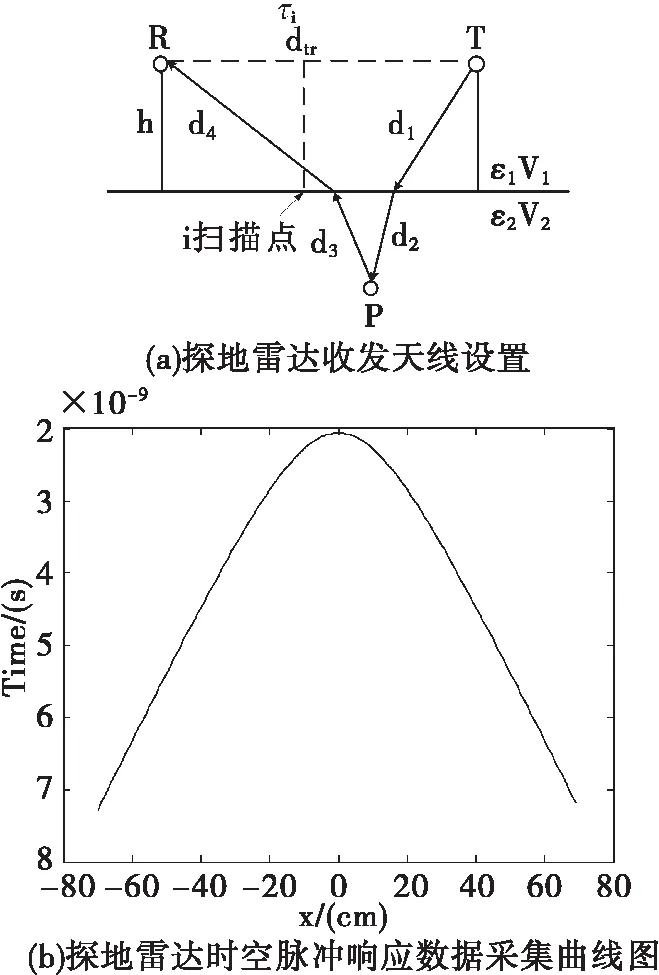
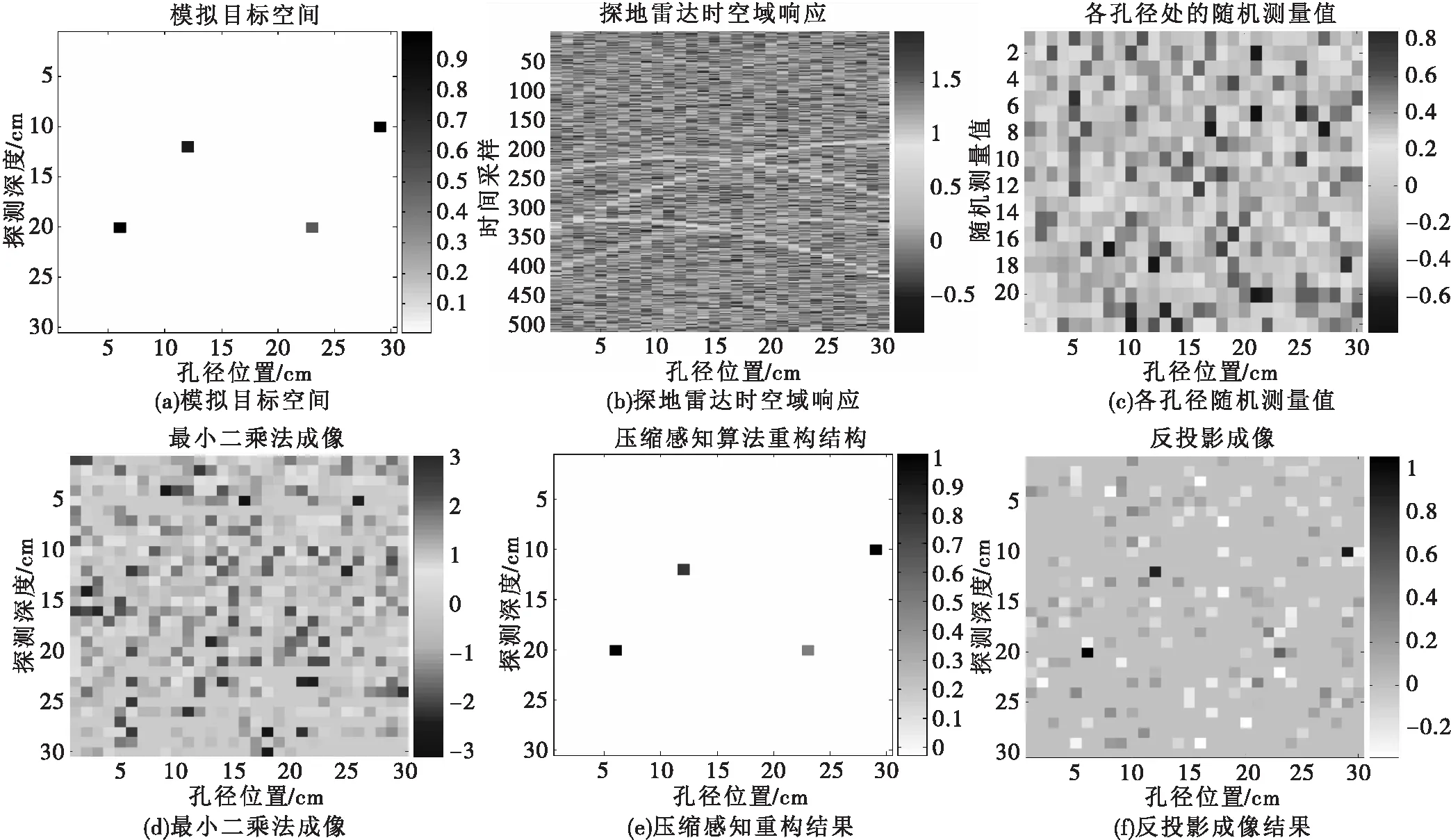
壓縮感知理論直接對稀疏信號進行采樣,x為任意N維K階的稀疏信號,s通過x在空間RN的M=c(μ2(Φ,ψ)logN)K(M< y=Φx=ΦΨs (2) 式(2)中y表示M維隨機測量值,Φ為M×N維隨機測量矩陣,常量C一般很小,μ(Φ,ψ)是Φ與ψ之間的相關值。當Φψ滿足有限等距特性[5]時,通過求解l1范數約束最優化問題 (3) 可從欠定方程式(2)的M個測量數據中用稀疏表示s還原原始信號x。 探地雷達使用雷達電磁脈沖對地下成像,當發射電磁波從不同的電介質邊界做出反射時,接收天線記錄反射回來的信號。本文使用常規的點目標模型,利用該模型得出延遲時間的反射回的接收信號 (4) s(t)是發射信號,τi(p)是天線在第i個孔徑點時收發天線和目標p之間總的往返時間延遲,σp是目標的反射系數,Ai,p是衰減和傳播損失的縮放比例因子。 通過探地雷達在空間中移動來收集從不同的掃描區域反射回的時間數據,這些掃描點的集合,構成了合成孔徑雷達的接收時空數據。系統使用收發天線分開固定裝置,收發天線間距為dtr,如圖1(a)所示。計算傳輸時間τi必須知道從發射天線到目標,再到接收天線波的傳輸路徑,以及不同介質中的波速。 圖1 探地雷達數據組圖 兩種不同的媒介如空氣和土壤有不同的電介質特性,根據斯涅爾折射定律改變波的傳播方向,波的折射對于擬域成像特別關鍵,因此精確計算折射點的方法至關重要[6]。確定折射點后,圖1(a)中的d1:4,i四個部分的距離路徑可計算得到,時間τi的計算為 (5) 隨著收發天線的移動收集掃描區域的數據,一個單目標在x=0,深度在10cm位置處時,探地雷達天線沿單道方向從-70cm到70cm進行掃描,得到一個單點目標時空域空間變換曲線響應圖如圖(b),當采集這個感興趣的區域的數據時,這個過程叫合成孔徑成像。 忽略目標之間的相互影響,探地雷達在掃描點(ux,uy)的時空數據的測量值計算為 (6) τ(ux,uy,x,y,z)是從發射天線到目標空間點(x,y,z)再到接收天線的總的傳輸時間,σ(x,y,z)是在目標空間點(x,y,z)的反射系數,AL(ux,uy,x,y,z)代表傳播損失。使用測量值d(ux,uy,t)的目的是為了產生反射剖面,即目標空間的成像。 標準成像算法對每一個時空域如圖1(b)數據采集系統的脈沖響應數據進行匹配濾波,時域標準反投影算法[6]表達式為 f(x,y,z)=?w(ux,uy)d(ux,uy,t)× (7) w(ux,uy)是在掃描區域的加權函數,通常用于減小圖像的旁瓣,δ()是脈沖響應。 在探地雷達工程應用中,當雷達對地下目標進行探測時,目標探測區域通常可認為是由多個離散的散射中心組成,目標散射中心只占據雷達探測區域的很小一部分空間單元。把雷達探測成像區域均勻的離散分成N個點散射目標,通過離散的空域目標空間πT創建每一個離散空域探地雷達模型。該模型產生一個有限系列的點目標β={π1,π2,…,πN} ,每一個πj是三維向量[xj,yj,zj],對于i孔徑點,ψi的j列是相對于目標在πj的接收信號,第j列的n個元素可以表示成公式(8)所示。 (8) 其中:tn=t0+n/Fs0≤n≤Nt-1,分母是時間信號能量,Fs是采樣頻率,t0是初始時間,Nt是暫存采樣數目,對β中每一個可能的目標點重復計算式(8),在i孔徑點產生字典ψi的大小為Nt×N,接收信號表示為 ζi=ψib (9) 其中向量b表示加權系數,其滿足稀疏性,表示為探測目標像矩陣中的各個元素。如果探測目標處在πj網格處時,向量b的第j個元素即為πj對應的反射系數,否則其元素值為0。 標準探地雷達接收器通常需要很高的采樣率,當目標空間是稀疏時,該文提出的基于壓縮感知的數據采集模型用一定量的雷達測量信號來重構雷達稀疏信號。一般情況下,信號x的測量值寫成y=Mx,M是測量矩陣。在第i個孔徑處 βi=φiζi=φiψib (10) βi是測量向量,Фi是M×Nt的測量矩陣(M?Nt)。壓縮感知理論要求矩陣ΦΨ滿足約束等距特性,保證Фi的行不能由ψi的列稀疏表示,反之亦然。隨機測量矩陣Фi服從獨立同分布或者伯努利分布。 (11) (12) 其中:ui=φini~N(0,σ2),ni為系統噪聲向量。b的重建問題可通過以下方法得到 (13) 或者 min‖b‖1s.t. ‖β-Ab‖2〈ε2 (14) 其中A=Фψ,ε1,2是正規化參數。通過求解式(13)、式(14)代表的約束問題,可以較高概率地從含有噪聲隨機測量信號中重構出加權系數向量b。 選面積為900cm2的地下二維模擬區域進行探測試驗,用π來標記目標空間。將地下二維目標空間劃分成30×30=900個等面積的網格,記作∏=[∏1,…,∏j,…,∏900]T,目標空間π的加權系數向量則用b=[b1,…,bj,…,b900]T表示。在地下模擬目標空間內隨機的放置4個模擬點目標,目標分布情況如圖2(a)所示。 反投影成像算法成像結果如圖2(f)所示,該算法首先計算出孔徑i處的探測信號從發射天線經目標空間第πj個目標反射進入接收機后的延時量τi(πj),并將所有孔徑中具有相同延時量的回波信號進行相加,利用全部目標空間512×900個目標回波數據恢復出目標函數b。 圖2 仿真探測試驗組圖 通過數據仿真和實驗結果表明,基于壓縮感知的探地雷達成像算法與傳統探地雷達成像算法相比,具有分辨率高,采集數據少,硬件實現簡單以及更易于目標辨識等優點。在實際探地雷達實時成像應用中,需要進一步研究效率更高的凸優化問題計算方法,并且選擇使用一個更廣義的測量矩陣,即一個完整的隨機矩陣代替現有對角陣Ф,更好地實現基于壓縮感知探地雷達實時成像的工程應用目的。2 壓縮感知合成孔徑探地雷達成像原理
δ(t-τ(ux,uy;x,y,z))dtduxduy2.1 創建探地雷達數據字典
2.2 壓縮感知數據獲取
2.3 壓縮感知探地雷達成像


3 實驗仿真及分析


4 結束語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00