一種低成本的機(jī)器人室內(nèi)可通行區(qū)域建模方法
2020-01-02 09:07:52張釜愷芮挺何雷楊成松
北京航空航天大學(xué)學(xué)報(bào) 2019年12期
張釜愷,芮挺,何雷,楊成松
(1.中國人民解放軍陸軍工程大學(xué) 研究生院,南京210000; 2.中國人民解放軍陸軍工程大學(xué) 野戰(zhàn)工程學(xué)院,南京210000)
近年來,隨著計(jì)算機(jī)、傳感器以及圖像處理技術(shù)[1]的進(jìn)步,機(jī)器人技術(shù)也得到了蓬勃的發(fā)展。基于視覺的同步定位與建圖(Simultaneous Localization and Mapping,SLAM)[2]技術(shù)是機(jī)器人領(lǐng)域的重要技術(shù)之一。SLAM 可以利用輸入的連續(xù)圖像來實(shí)時(shí)解算攝像機(jī)的運(yùn)動(dòng)軌跡,并且構(gòu)建場(chǎng)景的地圖用以指導(dǎo)機(jī)器人的行進(jìn)。
室內(nèi)環(huán)境是目前小型機(jī)器人的主要應(yīng)用領(lǐng)域。在包括倉儲(chǔ)物流、工廠物料搬運(yùn)、家居服務(wù)等應(yīng)用場(chǎng)景中,小型機(jī)器人都有很大的應(yīng)用潛力。對(duì)于以室內(nèi)為主要工作環(huán)境的小型機(jī)器人來說,單目攝像頭視覺傳感器由于較低的成本、較小的體積以及較高的布置靈活性,是機(jī)器人獲取周圍信息的主要來源。利用單目視覺信息獲取場(chǎng)景信息以指導(dǎo)機(jī)器人的行動(dòng),是相關(guān)研究的重點(diǎn)方向之一。其中,地面可通行區(qū)域的信息,包含了地面的紋理與可通行地面的范圍,可以直接用于對(duì)機(jī)器人的導(dǎo)航。地面可通行區(qū)域的建模可以為指導(dǎo)機(jī)器人的行動(dòng)提供很大的便利。
然而,由于室內(nèi)小型機(jī)器人的體積小、視角低、運(yùn)算能力弱、視場(chǎng)有限,應(yīng)用視覺SLAM 方法來實(shí)時(shí)理解場(chǎng)景較為困難。能夠構(gòu)建稠密地圖的SLAM方法對(duì)于計(jì)算資源有著較高的要求,不適合運(yùn)算能力較弱的小型機(jī)器人使用。而且,由于其視野內(nèi)的主要部分為地面且紋理特征較少,基于特征與梯度的SLAM方法只能獲得極為稀疏的地圖,對(duì)于場(chǎng)景的表現(xiàn)能力較差,無法指導(dǎo)機(jī)器人行動(dòng)。但另一方面,絕大多數(shù)室內(nèi)地面均為平面,而且紋理分布較為均勻,這又為地面的建模提供了方便。
針對(duì)此問題,本文提出了一種融合圖像分割與單目SLAM的室內(nèi)地面快速建模方法來獲取機(jī)器人的可通行區(qū)域。該方法基于單目特征點(diǎn)SLAM,并結(jié)合圖像分割,利用SLAM 生成的點(diǎn)云與圖像分割之間的相互印證來提高地面構(gòu)建的準(zhǔn)確性。最終,生成地面可通行區(qū)域的稠密建模,用以指導(dǎo)機(jī)器人的行動(dòng)。
通過實(shí)驗(yàn)與對(duì)比,在小型移動(dòng)機(jī)器人平臺(tái)上,相對(duì)于主流SLAM 方案,本文方法可以顯著提高對(duì)于地面建模的效果,并且滿足在移動(dòng)平臺(tái)上實(shí)時(shí)處理的要求。相比較于經(jīng)典的單目SLAM 方法,本文方法的運(yùn)行速度接近特征點(diǎn)SLAM,而對(duì)地面可通行區(qū)域的建模效果則接近稠密,對(duì)于機(jī)器人的行動(dòng)有較大的參考價(jià)值。
1 相關(guān)工作
SLAM問題自1988年被提出,經(jīng)過近30年的發(fā)展,取得了豐碩的成果。單目SLAM 目前主要有2條技術(shù)路線。直接法SLAM直接利用像素的亮度或梯度來匹配圖像間的像素,并可以在解算相機(jī)運(yùn)動(dòng)的同時(shí)生成稠密[3-4]或者半稠密[5-6]的場(chǎng)景地圖。特征法SLAM 利用點(diǎn)[7-8]或者線特征[9]來匹配圖像間的點(diǎn)或者線,進(jìn)而解算相機(jī)運(yùn)動(dòng)并生成只包括特征點(diǎn)或線的場(chǎng)景地圖。
在建模方面,直接法生成的稠密或半稠密地圖相對(duì)于特征法生成的稀疏地圖有著更多的點(diǎn),對(duì)于場(chǎng)景的描述也更加具有表現(xiàn)力。其中,代表性的系統(tǒng)有2011年的DTAM(Dense Tracking and Mapping)[10]、2014年 的LSD-SLAM(Large-Scale Direct monocular SLAM)[11]等。然而,雖然基于特征的SLAM系統(tǒng)只能獲得稀疏的地圖,但是一般來說具有更快的速度。而且由于便于使用束集調(diào)整(Bundle Adjustment,BA[12])進(jìn)行優(yōu)化,并進(jìn)行回環(huán)檢測(cè)[13],特征法獲取的軌跡一般來說更加準(zhǔn)確與魯棒。在特征法SLAM 中,2007年的Mono-SLAM系統(tǒng)[14]與同一年的PTAM(Parallel Tracking and Mapping)[15]是這一領(lǐng)域具有開創(chuàng)性的成果。2015 年 的 ORB-SLAM (ORiented Brief SLAM)[16]系統(tǒng)各項(xiàng)功能較為完備,已經(jīng)被廣大研究者用作后續(xù)二次開發(fā)研究的基礎(chǔ)系統(tǒng)。
為了在保持穩(wěn)定跟蹤的同時(shí),獲得更加稠密的地圖,有一些方法在特征法的基礎(chǔ)上進(jìn)行場(chǎng)景重建。2010年,Newcombe和Davison[17]提出的方法是在獲取了相機(jī)位姿與稀疏點(diǎn)云的基礎(chǔ)上,利用光流來重建場(chǎng)景表面。2015年,Murartal和Tardos基于ORB-SLAM系統(tǒng),利用逆深度濾波像素匹配,構(gòu)建了基于概率的半稠密場(chǎng)景地圖[18]。一般來說,此類方法的基本思想為基于SLAM 獲得的相機(jī)軌跡對(duì)圖像像素進(jìn)行匹配,并計(jì)算其空間位置。此類思路雖然可以結(jié)合直接法和特征點(diǎn)法的優(yōu)點(diǎn),但是運(yùn)算量也大大提升,并不符合小型移動(dòng)平臺(tái)的運(yùn)算能力。
為了提高運(yùn)算的速度,以適應(yīng)小型移動(dòng)平臺(tái)較低的運(yùn)算能力,近年來,基于視覺的低成本建模方法也成為了一個(gè)有意義的研究方向。2016年,Hinzmann等[19]提出了一種針對(duì)無人機(jī)平臺(tái)的低成本地面建模方法,利用無人機(jī)自身的傳感器感知姿態(tài),并結(jié)合圖像處理方法獲得對(duì)于地面的稠密建模。但是,該方法基于的圖像內(nèi)容全部為地面,不適用于小型地面無人車。2017年,蒙山和唐文名將直線引入點(diǎn)特征單目SLAM,并通過點(diǎn)線特征以及直線增強(qiáng)的J-Linkage算法構(gòu)建包含特征平面的場(chǎng)景地圖[20],但是該地圖相對(duì)于純特征點(diǎn)地圖,對(duì)場(chǎng)景描述效果的提升有限。2017年,von Stumberg等[21]針對(duì)小型旋翼無人機(jī),基于LSD-SLAM提出了一種本地探索避障策略與體素模型構(gòu)建方法,但是對(duì)于地面的建模效果較差。2018年,蔣林等[22]對(duì)基于嵌入式平臺(tái)三維重建算法進(jìn)行了研究,針對(duì)差動(dòng)式機(jī)器人的運(yùn)動(dòng)特點(diǎn)對(duì)算法進(jìn)行了針對(duì)性的簡(jiǎn)化,但是所利用的視覺傳感器為深度相機(jī)而非單目相機(jī)。
總體來說,現(xiàn)有的主流單目SLAM 系統(tǒng)在小型室內(nèi)機(jī)器人上運(yùn)行時(shí),由于平臺(tái)自身的特點(diǎn),或是地圖構(gòu)建過于稀疏;或是雖地圖稠密,但不能實(shí)現(xiàn)實(shí)時(shí)運(yùn)行。一般并不能在構(gòu)建場(chǎng)景方面取得令人滿意的效果。而現(xiàn)有的低成本建模方法中,針對(duì)小型地面機(jī)器人特點(diǎn)的研究不多,尚未出現(xiàn)較為合適的地面區(qū)域低成本建模方法。
2 室內(nèi)地面快速建模方法
2.1 整體流程
本文提出的融合圖像分割與單目SLAM的室內(nèi)地面快速建模方法構(gòu)建在單目特征點(diǎn)SLAM的基礎(chǔ)上,利用SLAM 系統(tǒng)獲得的相機(jī)位姿與稀疏點(diǎn)云,結(jié)合地面區(qū)域的分割圖像獲得地面的稠密建模。
系統(tǒng)的基本流程如下:首先,利用SLAM系統(tǒng)獲得的相機(jī)位姿與稀疏點(diǎn)云。其次,利用地面區(qū)域的分割圖像,將稀疏點(diǎn)云中投影在地面區(qū)域的點(diǎn)提取出來,獲取粗略的地面稀疏點(diǎn)云。然后,進(jìn)行濾波后,利用優(yōu)化模型對(duì)這些地面點(diǎn)擬合平面,獲取地平面的數(shù)學(xué)表達(dá)。之后,通過計(jì)算稀疏點(diǎn)云中的點(diǎn)與該地平面之間的位置關(guān)系,將它們相對(duì)精確地分為地面與非地面點(diǎn)云。再利用該分類來篩選地面分割圖像。最后,通過相機(jī)的位姿,將篩選過的地面分割圖像投影到地面平面上,并進(jìn)行濾波與降噪,獲得稠密的地面建模。整個(gè)系統(tǒng)的流程示意圖如圖1所示。
后文將對(duì)本文方法流程中的各主要功能模塊逐一進(jìn)行介紹。

圖1 本文方法整體流程圖Fig.1 Flowchart of proposed method
2.2 單目SLAM 模塊
本文使用ORB-SLAM[16]作為系統(tǒng)的單目SLAM模塊。ORB-SLAM 是一個(gè)功能完善,接口便捷的單目SLAM 系統(tǒng)。整個(gè)系統(tǒng)圍繞ORB點(diǎn)特征建立,在效率與精度之間達(dá)到了較好的平衡,自發(fā)表以來就被研究者們所廣泛使用。該系統(tǒng)包含3個(gè)平行的線程:跟蹤線程(tracking thread)、局部建圖線程(local mapping thread)和回環(huán)檢測(cè)線程(loop closing thread)。其中,跟蹤線程負(fù)責(zé)計(jì)算相機(jī)的運(yùn)動(dòng),以及指定關(guān)鍵幀,并在跟蹤丟失時(shí)負(fù)責(zé)重定位;局部建圖線程主要負(fù)責(zé)用局部束集調(diào)整(local BA)來對(duì)局部地圖進(jìn)行優(yōu)化,以及地圖點(diǎn)的插入和刪除;回環(huán)檢測(cè)線程主要負(fù)責(zé)進(jìn)行回環(huán)檢測(cè),在有回環(huán)出現(xiàn)時(shí)進(jìn)行閉環(huán)全局優(yōu)化。
2.3 地面區(qū)域的分割
在SLAM進(jìn)程對(duì)相機(jī)位姿進(jìn)行跟蹤的同時(shí),系統(tǒng)對(duì)每一幀輸入圖像進(jìn)行分割,以獲得地面區(qū)域的分割圖像。由于系統(tǒng)獲得的是一個(gè)地面分割的圖像序列,并且還需要和點(diǎn)云數(shù)據(jù)進(jìn)行比對(duì),所以對(duì)于單張地面分割圖像的精度要求不高,但是對(duì)于圖像分割的速度有著較高的要求,這使得采用目前主流的深度學(xué)習(xí)語義分割的方法[23]較為困難。基于以上分析,本文采用基于HSV(Hue,Saturation,Value)色彩空間的自適應(yīng)閾值分割方法來對(duì)地面區(qū)域進(jìn)行分割。
計(jì)算機(jī)存儲(chǔ)和處理圖片時(shí)一般采用的顏色編碼方式是RGB顏色空間,其將顏色按紅、綠、藍(lán)3個(gè)維度上的分量進(jìn)行編碼,而HSV顏色空間是按照色度、飽和度和亮度來進(jìn)行編碼,分別對(duì)應(yīng)H、S、V 3個(gè)分量,更貼近人眼的視覺感知,受光照的影響也更小[24]。在本文的分割方法中,先將待分割的圖像轉(zhuǎn)化到HSV色彩空間。
由于室內(nèi)小型機(jī)器人在運(yùn)動(dòng)過程中會(huì)與障礙物保持一定距離,所以其攝像頭拍攝圖像的中間底部一般為地面區(qū)域。基于此假設(shè),對(duì)于輸入圖像I,本系統(tǒng)設(shè)定圖像的底部中間區(qū)域?yàn)槟J(rèn)地面區(qū)域MG,其位置與尺寸如圖2(a)所示。首先,統(tǒng)計(jì)得到默認(rèn)地面區(qū)域MG內(nèi)H、S、V 3個(gè)分量的最值。然后對(duì)全圖像的每個(gè)像素pi進(jìn)行判斷:

式中:HG、SG、VG分別為默認(rèn)地面區(qū)域MG中所有像素H、S、V分量的集合;hi、si、vi分別為像素pi的H、S、V分量。若像素pi的3個(gè)分量均在默認(rèn)地面區(qū)域MG的分量范圍內(nèi),該像素就被加入候選地面區(qū)域G1,如圖2(b)所示。
在獲取候選地面區(qū)域之后,還需要進(jìn)行后續(xù)的濾波與處理。首先進(jìn)行開操作(采用運(yùn)算符號(hào)“○”表示)。開操作用于使對(duì)象的輪廓變得光滑,斷開狹窄的間斷和消除細(xì)的突出物。開操作的流程是先用結(jié)構(gòu)元素S對(duì)G1腐蝕(采用運(yùn)算符號(hào)“⊕”表示),然后再用S對(duì)結(jié)果進(jìn)行膨脹(采用運(yùn)算符號(hào)“?”表示)[25]。將候選地面區(qū)域G1用開操作處理后,得到區(qū)域G2:

區(qū)域G2如圖2(c)所示。其中,本文方法采用的結(jié)構(gòu)元素S為半徑為2像素的圓形結(jié)構(gòu)。
最后對(duì)區(qū)域進(jìn)行連通域劃分,劃分結(jié)果如圖2(d)所示。選取默認(rèn)地面區(qū)域MG所在的連通域作為分割得到的地面區(qū)域G3,如圖2(e)所示。獲得的地面分割圖像如圖2(f)所示。
2.4 地面點(diǎn)云的獲取、濾波與地平面的計(jì)算
在SLAM模塊向稀疏點(diǎn)云地圖中添加每一個(gè)空間地圖點(diǎn)Qi時(shí),都會(huì)判斷該點(diǎn)在其對(duì)應(yīng)的地面分割圖像上是否位于地面區(qū)域。如果位于地面區(qū)域,則將該點(diǎn)加入地面點(diǎn)云Cg。
然后,利用該地面點(diǎn)云來獲得地平面的數(shù)學(xué)表達(dá)。由于點(diǎn)云位置計(jì)算誤差以及地面分割誤差的存在,在后續(xù)處理之前,需要先去除地面點(diǎn)云中明顯的誤差離群點(diǎn)。本文采用統(tǒng)計(jì)濾波的方法進(jìn)行離群點(diǎn)的去除[26]:
1)計(jì)算點(diǎn)Qi與其鄰域范圍內(nèi)k個(gè)鄰域點(diǎn)的平均距離。
2)分析所有點(diǎn)k鄰域平均距離,計(jì)算其均值m和標(biāo)準(zhǔn)差σ。
3)設(shè)置標(biāo)準(zhǔn)差倍數(shù)閾值std,確定距離閾值為

4)若點(diǎn)Qi的k鄰域平均距離大于距離閾值d,則為噪聲點(diǎn),去除。
本文方法的應(yīng)用環(huán)境是地面為平面的室內(nèi)環(huán)境。建立優(yōu)化模型對(duì)經(jīng)過統(tǒng)計(jì)濾波的地面點(diǎn)云Cg′進(jìn)行平面擬合,使點(diǎn)到平面的總距離最小。設(shè)地平面F的表達(dá)式為

優(yōu)化模型為

2.5 對(duì)地面分割圖像的篩選
在獲取了地平面F的表達(dá)式后,系統(tǒng)對(duì)地面分割圖像進(jìn)行篩選。對(duì)于每一個(gè)關(guān)鍵幀,系統(tǒng)計(jì)算其觀察到的所有地圖點(diǎn)與地平面F的位置關(guān)系,并將所有位于地平面F上方μ(單位為cm)以上的點(diǎn)視為非地面點(diǎn),其余視為地面點(diǎn)。
若某張地面分割圖像的地面區(qū)域上有超過n個(gè)非地面點(diǎn)的投影,則略去這張分割。在本文的實(shí)驗(yàn)中,略去的分割如圖3所示(其中紅色為非地面點(diǎn),綠色為地面點(diǎn))。
從圖3可以看出,將墻體下沿的部分瓷磚也劃入了地面分割,從而包括了大量非地面點(diǎn),并因此被略去。

圖3 被略去的地面分割圖像示例Fig.3 An example of excluded ground segmentation image
2.6 稠密地面建模
至此,系統(tǒng)通過對(duì)稀疏點(diǎn)云與地面分割圖像的交叉比對(duì),已經(jīng)獲得了相對(duì)精確的地平面與分割圖像。利用關(guān)鍵幀的位姿,將地面分割圖像投影到地平面上即可得到稠密的地面點(diǎn)云模型,如圖4所示。
首先,通過相機(jī)內(nèi)參矩陣K,將地面分割圖像上的像素pi從圖像坐標(biāo)[u,v]T反投影到相機(jī)坐標(biāo)系中,獲得相機(jī)坐標(biāo)系下的坐標(biāo)PC=[Xc,Yc,]T:
式中:深度值ZC為未知量。
然后,通過該幀的相機(jī)位姿變換矩陣Twc,將相機(jī)坐標(biāo)系下的坐標(biāo)轉(zhuǎn)換到世界坐標(biāo)系坐標(biāo)Pw,即


圖4 將分割圖像投影到地平面對(duì)地面建模Fig.4 Projecting segmented images to groundplane for ground modeling
該世界坐標(biāo)(xw,yw,zw)應(yīng)該在平面F上,即

利用式(8)解出未知深度ZC,即可以得到該像素點(diǎn)對(duì)應(yīng)的世界坐標(biāo)。對(duì)所有地面分割圖像如此操作后,再進(jìn)行體素濾波,設(shè)定濾波半徑為0.01,即半徑0.01的范圍內(nèi)只保留一個(gè)點(diǎn)。最終,得到地面的稠密點(diǎn)云模型。
3 實(shí)驗(yàn)與分析
為了驗(yàn)證本文方法的可行性與實(shí)用性,使用搭載了單目攝像頭的小型機(jī)器人獲取數(shù)據(jù)。數(shù)據(jù)的處理使用筆記本電腦,搭載Ubuntu 16.04系統(tǒng),處理器(CPU)為Intel 4 200 H,內(nèi)存4 G。并同樣的環(huán)境中用同樣的平臺(tái)運(yùn)行了ORB-SLAM 系統(tǒng),與本文的系統(tǒng)相對(duì)比。
分別以辦公室與教室作為實(shí)驗(yàn)環(huán)境。其中,辦公室的地面為瓷磚,顏色與紋理相對(duì)連續(xù),但是如圖5(a)所示,地面存在很嚴(yán)重的倒影現(xiàn)象。教室場(chǎng)景較為簡(jiǎn)單,光照較為均勻,但是如圖5(b)所示,教室的地面上存在明顯的黑色地磚縫,地面色彩與紋理不連續(xù)。2個(gè)實(shí)驗(yàn)環(huán)境對(duì)于地面區(qū)域的建模均具有一定的挑戰(zhàn)。
經(jīng)過預(yù)實(shí)驗(yàn),在實(shí)驗(yàn)中將點(diǎn)云的統(tǒng)計(jì)濾波參數(shù)設(shè)置為k=10,std=1,將地面分割圖像篩選過程中的參數(shù)設(shè)置為μ=3 cm,n=50。

圖5 實(shí)驗(yàn)環(huán)境Fig.5 Experimental environment
3.1 場(chǎng)景與建模效果
3.1.1 辦公室場(chǎng)景
辦公室環(huán)境和機(jī)器人的運(yùn)動(dòng)軌跡如圖6所示。本文方法得到的稠密地面建模與非地面稀疏點(diǎn)云如圖7所示。ORB-SLAM得到的場(chǎng)景稀疏點(diǎn)云如圖8所示。

圖6 辦公室環(huán)境與機(jī)器人運(yùn)動(dòng)軌跡Fig.6 Office environment and robot movement track
辦公室場(chǎng)景的地面可通行區(qū)域邊界本身就并不明晰,所以建模的邊緣并不規(guī)則。但是本文方法得到的模型能夠基本準(zhǔn)確地反映通路的寬窄與通過情況,例如中間一段通路中最細(xì)的部分反映了因墻面突起造成的障礙。
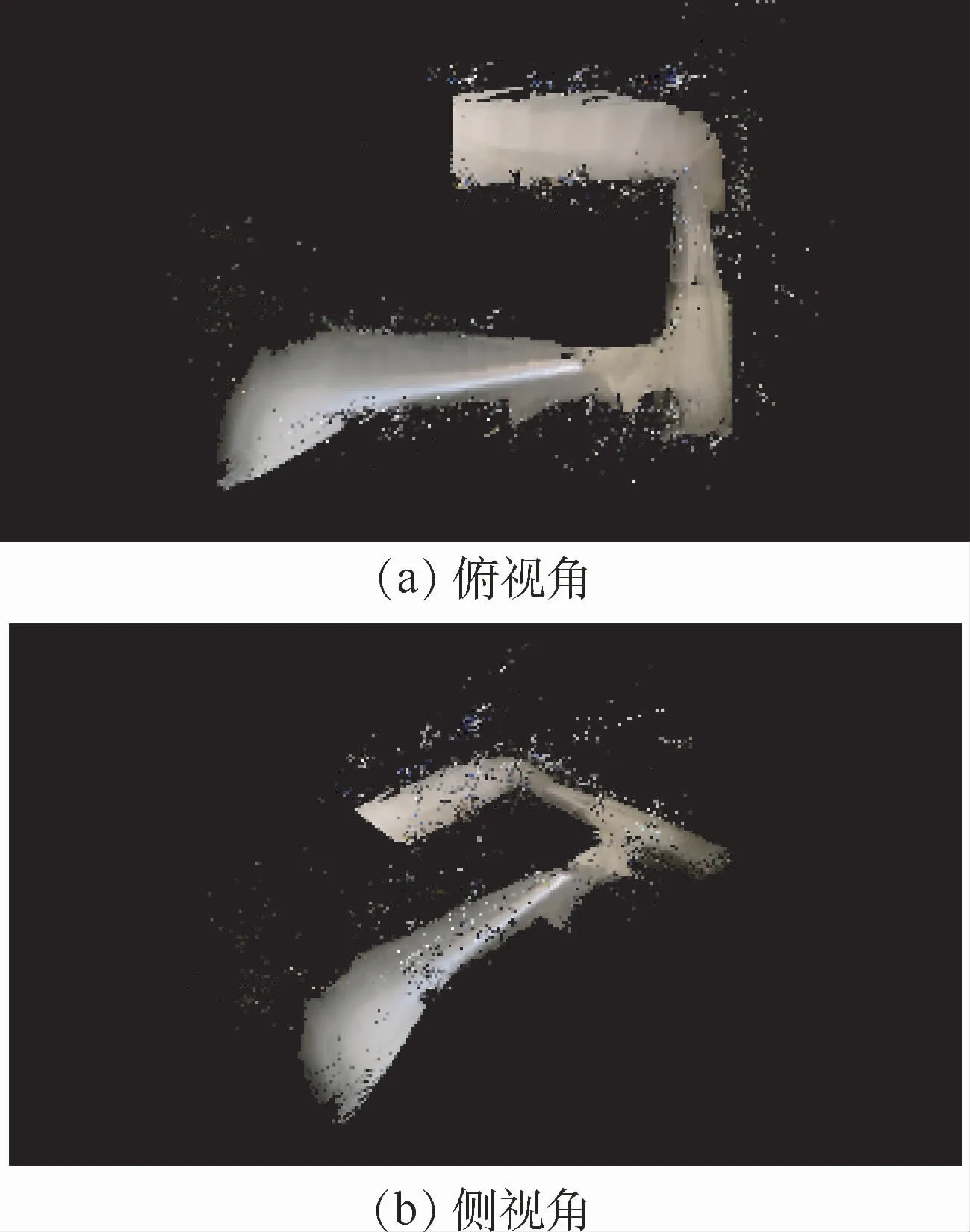
圖7 本文方法得到的辦公室稠密地面建模與非地面稀疏點(diǎn)云Fig.7 Office dense ground modeling and non-ground sparse point cloud obtained by proposed method
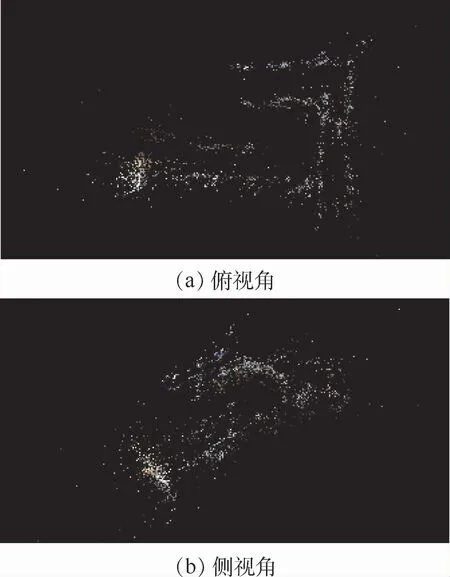
圖8 ORB-SLAM得到的辦公室稀疏點(diǎn)云Fig.8 Office sparse point cloud obtained by ORB-SLAM
3.1.2 教室場(chǎng)景
教室環(huán)境和機(jī)器人的運(yùn)動(dòng)軌跡如圖9所示。本文方法得到的稠密地面建模與非地面稀疏點(diǎn)云如圖10所示。ORB-SLAM 得到的場(chǎng)景稀疏點(diǎn)云如圖11所示。
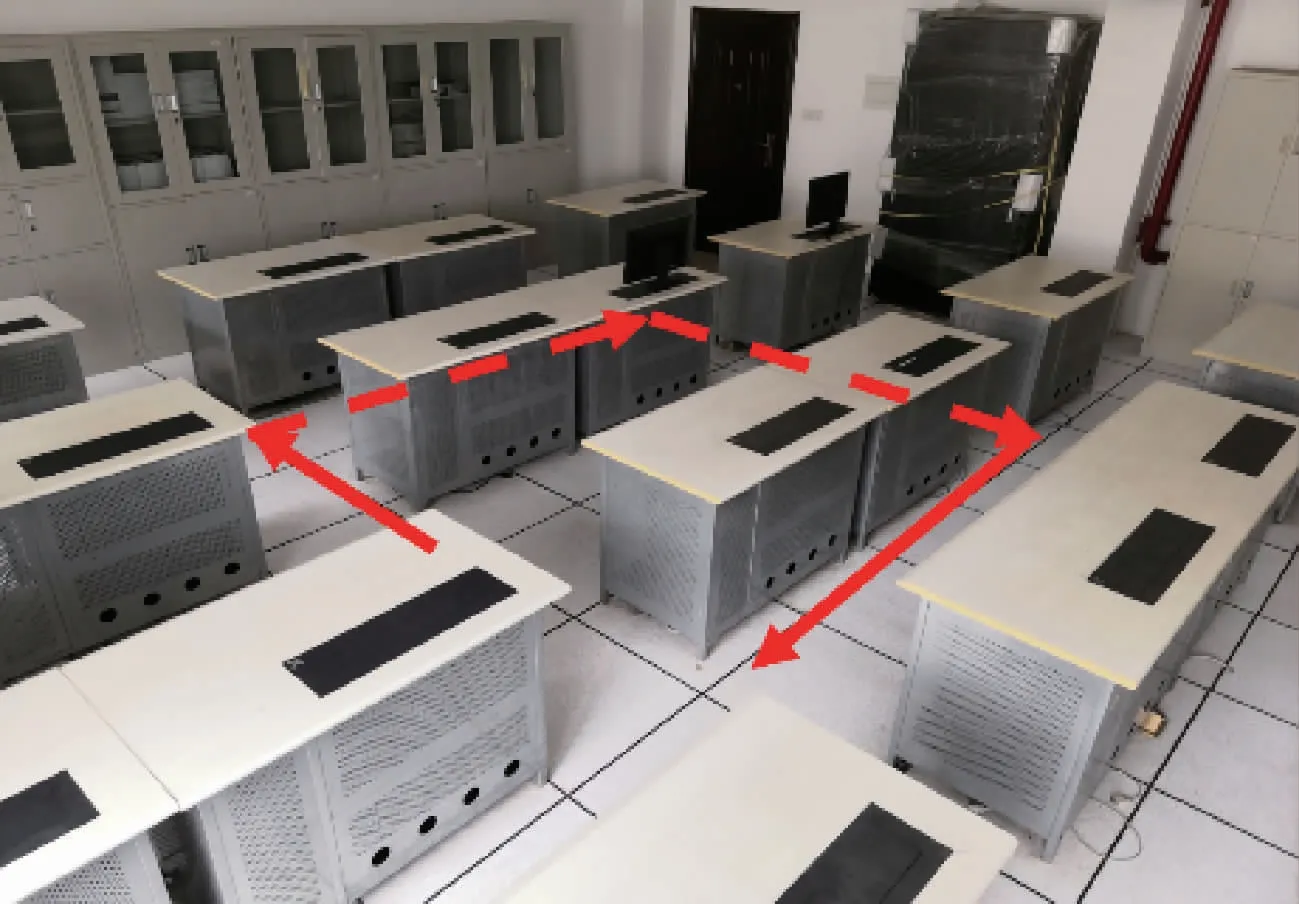
圖9 教室環(huán)境與機(jī)器人運(yùn)動(dòng)軌跡Fig.9 Classroom environment and robot movement track
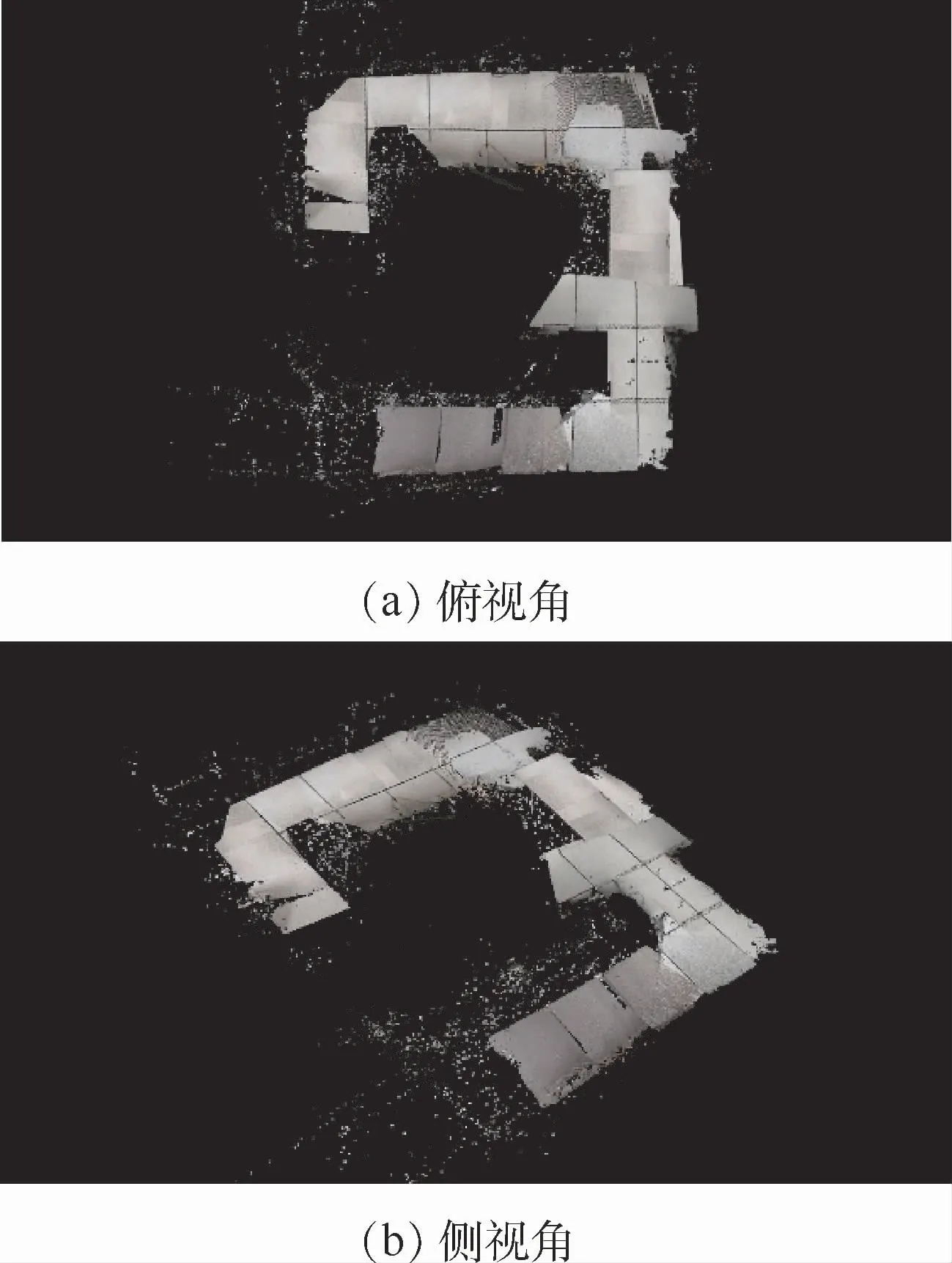
圖10 本文方法得到的教室稠密地面建模與非地面稀疏點(diǎn)云Fig.10 Classroom dense ground modeling and non-ground sparse point cloud obtained by proposed method

圖11 ORB-SLAM得到的教室稀疏點(diǎn)云Fig.11 Classroom sparse point cloud obtained by ORB-SLAM
教室場(chǎng)景的地面比較規(guī)則,本文方法所建的模型較好地還原了通行區(qū)域的地面情況。但是由于通路狹窄,在轉(zhuǎn)彎的位置相機(jī)面對(duì)旁邊的課桌,地面的圖像區(qū)域不足,造成轉(zhuǎn)彎部分建模效果稍差。
3.1.3 建模效果
從圖11中可以看出,原ORB-SLAM 生成的點(diǎn)云十分稀疏,只是標(biāo)記了特征點(diǎn)的位置,根本無法從中獲得地面的位置以及場(chǎng)景的有效信息,對(duì)場(chǎng)景的還原效果較差,基本不能用于對(duì)場(chǎng)景的描述,指導(dǎo)機(jī)器人行動(dòng)。而本文方法獲得了對(duì)于地平面的稠密建模,基本涵蓋了機(jī)器人視野范圍內(nèi)的可通行區(qū)域。相比較原ORB-SLAM 算法,本文方法生成的地圖更具有實(shí)用性。
3.2 運(yùn)算速度
在實(shí)際的運(yùn)行中,本文方法與ORB-SLAM 算法平均每一幀各階段的運(yùn)算時(shí)間如表1所示。
從表1數(shù)據(jù)可以看出,相比較于ORB-SLAM,本文方法中的SLAM運(yùn)算時(shí)間基本不變。增加的計(jì)算時(shí)間中,占比最大的部分是圖像的分割與地面稠密建模。由于本文方法添加的操作全部是基于關(guān)鍵幀的,所以實(shí)際平均到每一幀的時(shí)間都很短。總體來看,本文方法能夠達(dá)到21幀/s的平均運(yùn)行速度,ORB-SLAM的平均運(yùn)行速度約為30幀/s。本文方法約為ORB-SLAM的70%,能夠滿足預(yù)期的應(yīng)用要求。

表1 平均每幀運(yùn)算時(shí)間Table 1 Average operation time per frame
3.3 精度分析
由于單目SLAM方法生成的空間數(shù)據(jù)具有尺度不確定性,所以為分析本文方法的建模精度,首先將生成的相機(jī)軌跡與真實(shí)的軌跡進(jìn)行配準(zhǔn),得到數(shù)據(jù)的正確尺度后,再與實(shí)際數(shù)據(jù)相對(duì)比,進(jìn)行精度分析。而ORB-SLAM得到的稀疏點(diǎn)云地圖則過于稀疏,基本上無法從中提取通路的位置與具體范圍,精度也無從談起,故不對(duì)其進(jìn)行精度分析。
3.3.1 地平面的位置還原精度
本文方法對(duì)地面進(jìn)行還原的重要步驟是擬合地平面。由于搭載的相機(jī)高度已知,通過對(duì)比相機(jī)真實(shí)高度與相機(jī)和擬合地平面之間的平均距離,可以得到地平面的位置還原精度,如表2所示。可見,地平面位置的還原平均絕對(duì)誤差為5.8%。
3.3.2 場(chǎng)景建模精度
在2個(gè)場(chǎng)景中,分別在系統(tǒng)生成的稠密地面模型上選取3處通路的寬度進(jìn)行測(cè)量,與實(shí)際地面上通路的寬度進(jìn)行對(duì)比,以分析方法的場(chǎng)景建模精度。由于轉(zhuǎn)彎處存在遮擋,相機(jī)拍不到通路的全貌,故選取直線前行的部分通路作為實(shí)驗(yàn)分析的對(duì)象。
1)辦公室
對(duì)地面上3段通路的寬度進(jìn)行測(cè)量(見圖12)。
與真實(shí)的寬度進(jìn)行對(duì)比,得到的結(jié)果如表3所示。
通過對(duì)地面3處通路的寬度進(jìn)行測(cè)量后,我們發(fā)現(xiàn)a處和b處精度較高,而c處誤差較大。經(jīng)分析,這部分的誤差較大主要是由于地面倒影的影響,分析詳見后文3.4.1節(jié)。
2)教室
對(duì)系統(tǒng)生成的稠密地面模型進(jìn)行測(cè)量,對(duì)地面上3段通路的寬度進(jìn)行測(cè)量(見圖13)。

表2 地平面位置還原精度Table 2 Accuracy of ground plane position restoration

圖12 辦公室通路寬度測(cè)量Fig.12 Path width measurement of office

表3 辦公室地面建模精度Table 3 Ground modeling accuracy of office
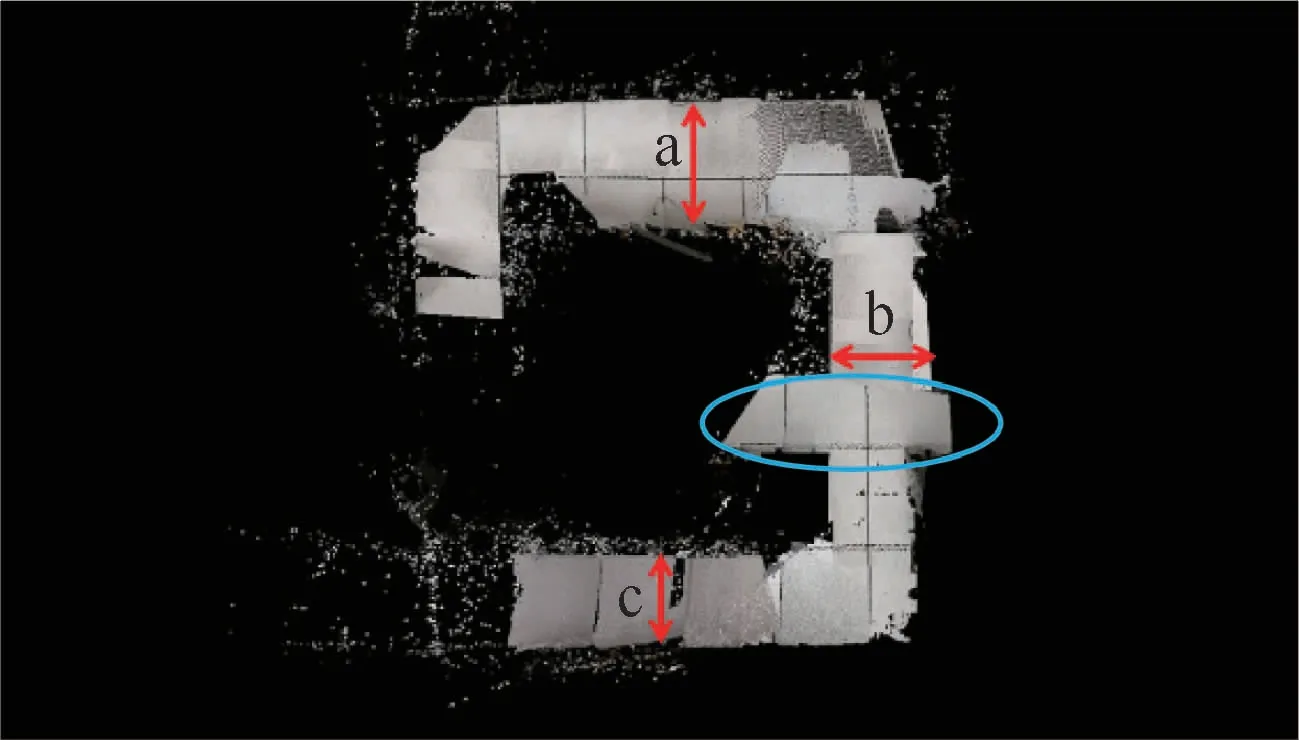
圖13 教室通路寬度測(cè)量Fig.13 Path width measurement of classroom
與真實(shí)的寬度進(jìn)行對(duì)比,得到的結(jié)果如表4所示(b處下方藍(lán)圈內(nèi)為兩條通路交叉的位置,并非通路寬度)。
通過對(duì)地面3處通路的寬度進(jìn)行測(cè)量后,發(fā)現(xiàn)a處和b處精度較高,而c處相對(duì)誤差較大。經(jīng)分析,該部分誤差主要由地面紋理不連續(xù)造成,分析詳見后文3.4.2節(jié)。
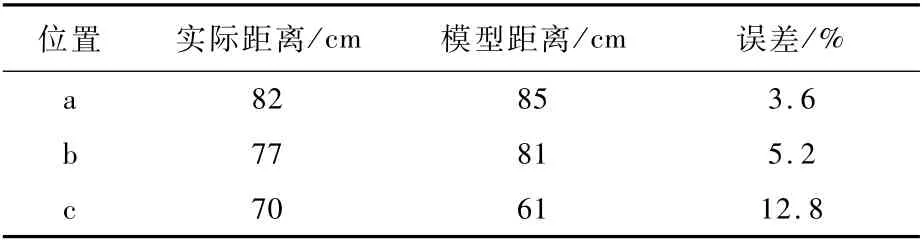
表4 教室地面建模精度Table 4 Ground modeling accuracy of classroom
3.4 外在因素的影響分析
3.4.1 地面倒影
在圖12辦公室建模的c處,這一區(qū)域攝像機(jī)面向窗戶,由于室外亮度較大,在地面瓷磚上產(chǎn)生了倒影,使得地面中間區(qū)域亮度較高,地面的顏色出現(xiàn)了較大區(qū)別。對(duì)于地面劃分出現(xiàn)了一定的誤差,如圖14所示。
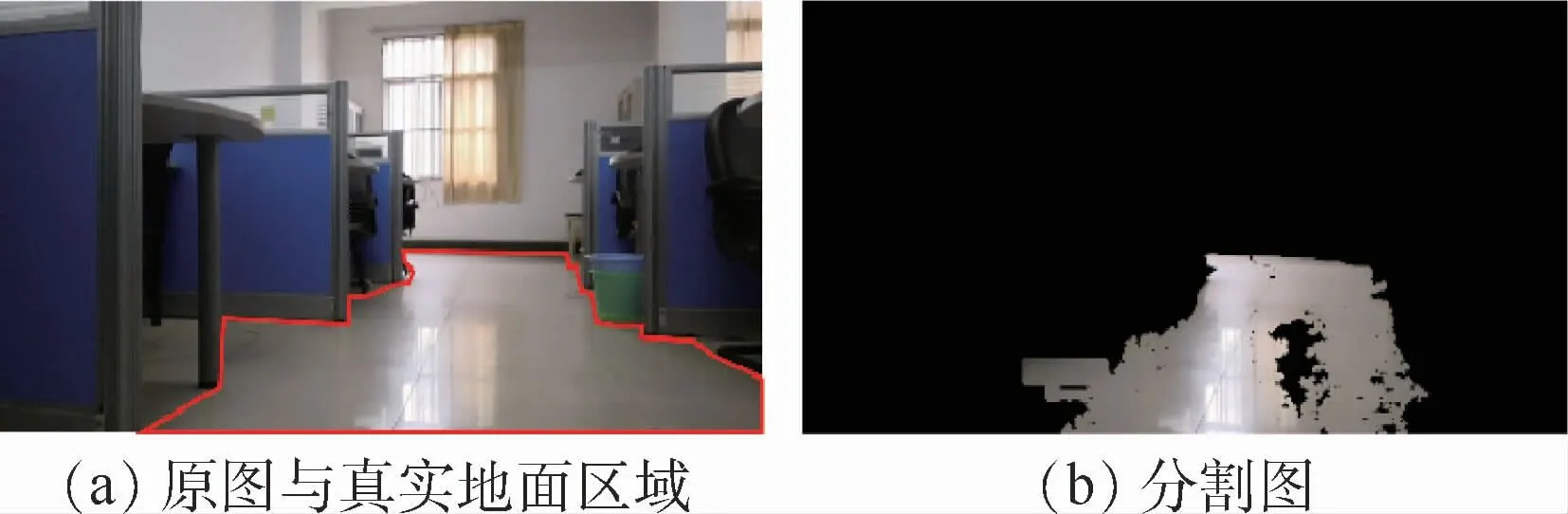
圖14 地面倒影對(duì)圖像分割的影響Fig.14 Effect of ground reflection on image segmentation
3.4.2 地面不均勻紋理
地面的不均勻紋理對(duì)于本文方法存在一定的影響。在教室中,地面存在明顯的地磚縫,導(dǎo)致有少部分圖像對(duì)于地面區(qū)域的分割不連續(xù),經(jīng)過連通域計(jì)算后只留下一塊地磚內(nèi)的地面,如圖15所示。
根據(jù)對(duì)于重建效果的觀察和重建精度的分析,雖然存在倒影與地面紋理不均勻造成的圖像分割誤差,但是它們對(duì)于整體的地面重建效果影響較為有限。由于本文方法利用了圖像的序列整體信息,對(duì)于部分圖像的信息缺失,可以通過序列中其他相對(duì)正確的分割投影所掩蓋。

圖15 地面不均勻紋理對(duì)圖像分割的影響Fig.15 Effect of uneven texture of ground on image segmentation
4 結(jié) 論
關(guān)于場(chǎng)景的建模,從場(chǎng)景中獲取有意義的信息。速度與效果間的矛盾一直是研究中一個(gè)繞不過去的問題。近年來,國內(nèi)外有許多研究試圖在二者之間達(dá)到合適的平衡。本文結(jié)論如下:
1)對(duì)于室內(nèi)小型機(jī)器人這一特定應(yīng)用平臺(tái),以及室內(nèi)環(huán)境這一特定場(chǎng)景,很多問題可以得到簡(jiǎn)化。
2)本文方法最大限度地利用了特定環(huán)境與特定需求,將對(duì)全場(chǎng)景的建模簡(jiǎn)化為地面的建模,將圖片深度的求取簡(jiǎn)化為直接投影在地平面上,可以用盡可能小的計(jì)算量來為機(jī)器人實(shí)時(shí)提供盡可能多的信息。
3)實(shí)驗(yàn)證明,本文方法可以以接近特征點(diǎn)SLAM 的速度,生成較為準(zhǔn)確的地面可通行區(qū)域稠密建模。點(diǎn)云與分割的交叉驗(yàn)證以及圖像序列的使用也可以在相當(dāng)程度上抵消地面倒影、地面分割困難等不利情況的影響。
猜你喜歡
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
民生周刊(2012年10期)2012-10-14 09:06:46
