中空長航時無人機兩段翼型設計研究
2019-12-31 07:47:02李建華李茂強于悅洋
空氣動力學學報 2019年5期
李建華,李 鋒,李茂強,于悅洋
(中國航天空氣動力技術研究院 航天彩虹無人機股份有限公司,北京 100074)
0 引 言
中空長航時無人機追求高續航性能和任務多樣化(大部分要求多裝載和察打一體化功能),此類飛機通常具有大展弦比、低推重比和較大寄生阻力等技術特點,因而在起飛升力、起飛和巡航升阻比以及結構高度等方面具有很高的要求。首先,由于較大寄生阻力并追求高續航性能,此類無人機需用很大的巡航升力以提高其續航因子[1-3,8];其次,較小的推重比和短距起降要求無人機具有很高的起飛升力和升阻比;再者,大展弦比和內部裝載要求機翼具有一定的結構高度;除此之外,著陸階段在保持較高升力同時具有較高的阻力,降低著陸距離和提高著陸安全性[4]。兩段翼型能保持較長的層流區,在大升力時維持較小阻力,同時通過構型的變化適用于不同任務階段,具有高升力和多任務適應能力等技術特點。即須由過去單段翼型的高效巡航單設計點設計升級成為起飛高升高升阻比、巡航高效和著陸高升高阻的多設計點設計;同時采用固定轉軸(非傳統襟翼復雜的傳動機構),將襟翼和阻力板功能融合,其結構形式簡單滿足無人機使用的技術特點。綜上所述,能滿足多任務適應能力的兩段翼型是長航時和短距起降無人機翼型設計的一個重要發展方向[2-6]。
本文在原中空長航時無人機單段翼型設計的基礎上開展高升力多任務適應能力的兩段翼型設計方法研究和翼型設計。
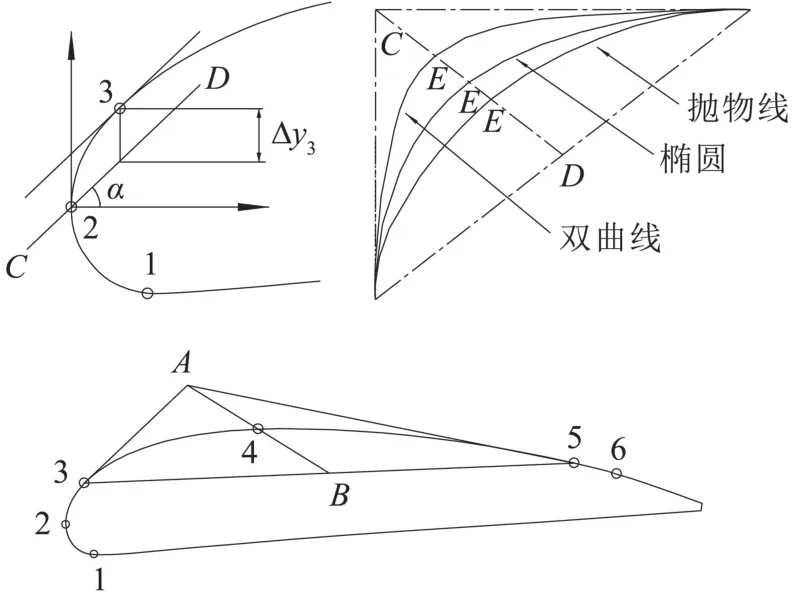
圖1 文獻[7]襟翼外形生成方法Fig.1 Flap configuration of the reference[7]
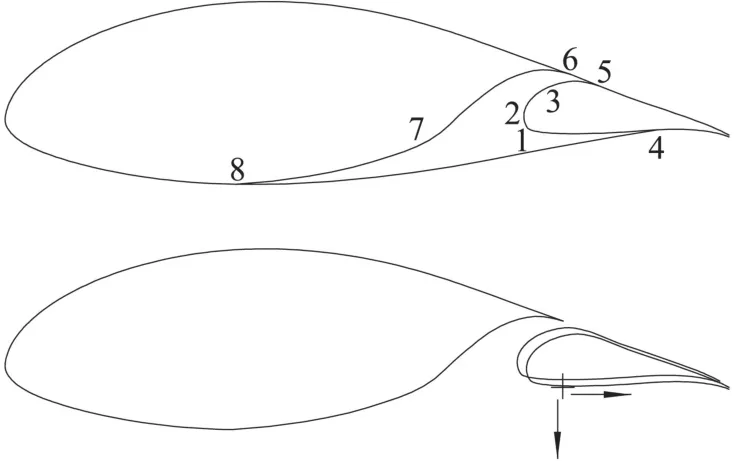
圖2 兩段翼型外形生成示意圖Fig.2 Sketch map of two-element airfoil
1 翼型設計思路和生成方法
1.1 兩段翼型設計思路
本文結合某型無人機在續航和起降特性改進設計需要,為了滿足起降和巡航以及結構高度等約束,在單段翼型設計特點的基礎上,盡量維持原有翼型的基本幾何形狀(尤其是上表面,維持原有翼型在低雷諾數條件下層流特性[3]),并在主翼后梁高度和襟翼(第二段翼)前緣半徑等關鍵位置設置控制點,其余部分通過分段可控二次曲線與原始翼型相切過渡。利用控制點加分段二次曲線方法快速生成兩段翼型外形,之后通過優化程序使主翼及襟翼外形、縫道參數和轉軸位置匹配,使之滿足多設計點要求。
1.2 兩段翼型生成方法
后緣襟翼生成方法通常參考飛機設計手冊或文獻[9],在原始翼型的基礎上通過切割法生成襟翼外形。為了加強對外形的控制,文獻[7]引入了襟翼頭部上表面控制點位置偏移量和斜率以及形狀控制變量來改變襟翼前緣形狀和曲線方程(圖1)。圖中右上角部分展現了形狀控制變量(Q=)對二次曲線的控制效果,通過二次曲線的線型的改變來控制襟翼上表面曲線形狀(圖中點3~點5曲線段);襟翼頭部曲線(點1~點曲線3段)通過斜率α和偏移量Δy3參數控制。
本文研究對象除了需考慮到高升力和多設計點綜合設計,還涉及到低雷諾數流動和層流再生成等復雜流動現象。從國外研究結果來看,其主翼和襟翼外形參數和常規襟翼參數分布存在較大的差異[2-3,12],主翼和襟翼下表面外形也與原始翼型差別較大,文獻中雖然提到了翼型分割之后襟翼平移的研究思路,但針對變化較大的外形其未給出生成方法。國內的文獻[5]通過“橢圓-控制點”方法生成兩段翼型,經研究發現此方法包括文獻[7]方法與初始翼型關系較大,會遇到翼型壓力分布不合理現象(見后面分析)。本文在文獻[5]和文獻[7]工作的基礎上,借用其部分思想,通過在關鍵位置增加控制點并結合可控二次曲線生成兩段翼型,提高其對原始翼型的適應能力,使其更加適用于優化程序,同時改善流場品質提高翼型性能。
如前所述為了盡量維持原有翼型優良的氣動特性,在原有翼型的基礎上通過在關鍵位置增加控制點并結合可控二次曲線和優化方法生成兩段翼型。首先,將需要優化的外形分成五部分(圖2所示),即點1~點3曲線段、點3~點5曲線段和點1~點4曲線段,其構成襟翼前緣外形;點6~點7曲線段和點7~點8曲線段構成主翼下翼面后緣外形。其次,選擇控制點及其參數,除了一般控制點約束(點4、5、6、8只能在原始翼型上移動),點1和點2給定坐標(點2處斜率無窮大)用于控制襟翼前緣形狀;為了更好的控制主翼后梁高度和后緣形狀,點3和點7給定了點坐標與斜率,其值作為優化參數隨優化過程而改變。再次,設定曲線的形狀控制參數用于進一步控制曲線的形式。此方法控制參數更多,很大程度上將主翼下表面和襟翼頭部外形分開設計,下表面外形對原始翼型依賴性更小;同時結合目標要求對外形參數和縫道參數一并優化設計,從而具有更好的靈活性和適應能力,更適合多目標和多約束下的優化設計。
二次曲線控制方程表達式為:

二次曲線可為橢圓、雙曲線和拋物線,根據外形生成的需要,本文點6~點7和點3~點5曲線段采用可變的形狀控制參數控制其二次曲線類型,由優化算法決定形狀控制參數Q值;其余曲線段根據初步研究結果采用固定形狀控制參數(二次曲線的類型在優化過程中不變)。結合控制點參數和曲線類型能夠生成控制段的外形,如通過聯合求解點1的坐標、點2和點3的坐標與斜率得到二次曲線系數,從而確定點1~點3曲線段外形方程;其余曲線段外形方程的系數則通過聯合求解相應曲線的起點和終點坐標和斜率以及形狀控制參數而得到。
2 設計方法及結果分析
2.1 設計方法和條件
本文針對中空長航時固定翼無人機在巡航和起飛等狀態下的約束進行兩段翼型優化設計,優化參數包括兩段翼型外形和縫道參數以及轉軸位置。考慮到無人機的使用和保障要求,襟翼形式盡量簡單,采用固定轉軸(轉軸位置設計過程中可變)。除此之外,本文主要目的是驗證兩段翼型外形生成方法和優化設計方法的有效性,此階段將巡航狀態和起飛狀態分開設計,巡航狀態以最大升阻比為優化目標(長航時無人機續航性能為首選),優化變量為兩段翼型外形和縫道參數;起飛狀態以起飛升力為優化目標,以轉軸位置為優化參數,并校核優化結果是否滿足起降要求。考慮到目標函數與控制參數和約束條件的關系不明確,采用多島遺傳算法進行全局尋優;優化設計程序包含優化算法、翼型生成、網格生成、流場模擬和結果處理五大模塊。
由于涉及到大升力和多段翼型縫道流動,其流場特性包含大量黏性擾流和分離流。為了保證數值模擬的準確性,氣動力通過求解RANS方程得到,選用SSTκ-ω兩方程湍流模型,文獻[10,11]表明此模型在低雷諾數分離流方面和襟翼升力方面都具有很好的模擬能力。來流馬赫數Ma=0.15,Re=3.0×106。為了更加準確對流場進行模擬,采用多塊C型網格(圖3),并保證每次優化過程網格參數分布一致,以避免因網格對優化結果造成影響。為了驗證方法的可靠,開展與本文類型相似的GAW-1翼型在相近條件下(Ma=0.15,Re=6.3×106)的對比分析(詳見圖4,試驗數據可參見文獻[13]),對比結果表明本文采用的方法合理。
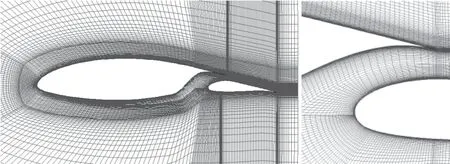
圖3 計算網格Fig.3 Computational grid of the flow field
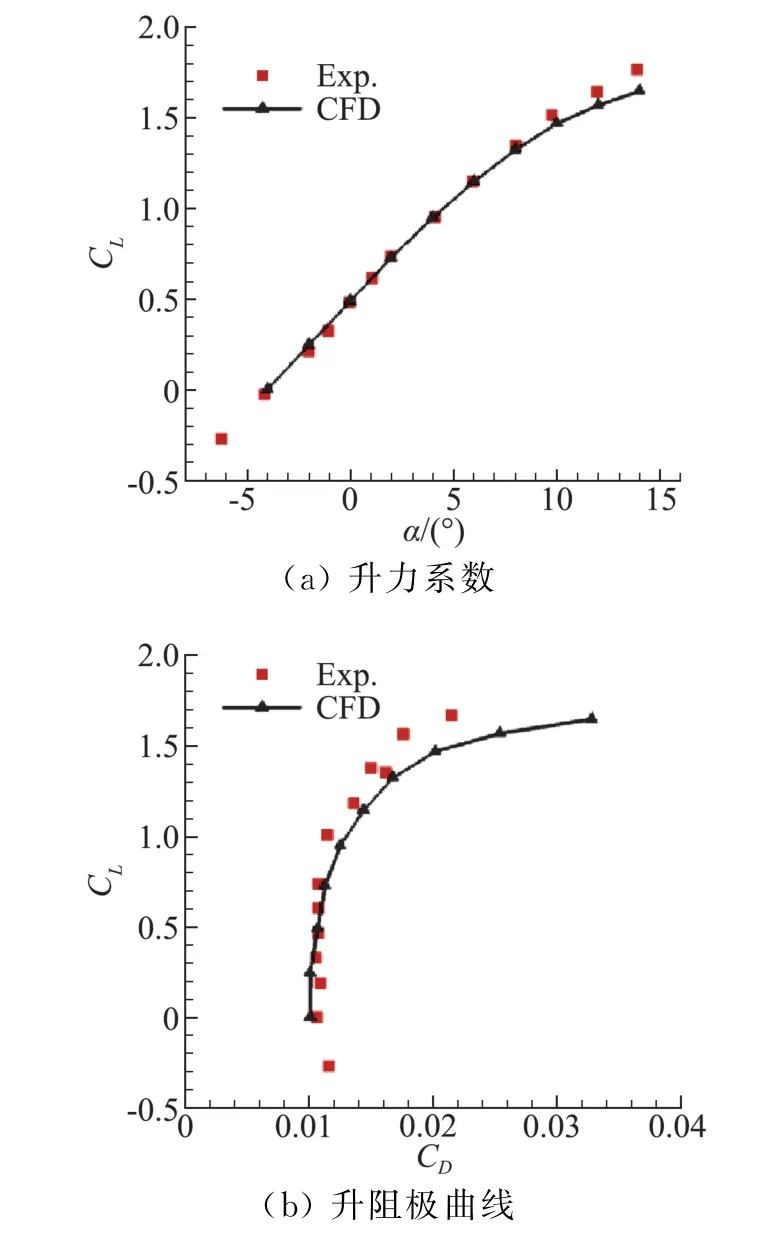
圖4 計算和試驗的對比Fig.4 Comparison of test and computational result
2.2 設計結果及分析
續航性能對于低速長航時無人機而言是最為重要的指標之一,其很大程度依賴于翼型的升阻比,所以翼型優化設計時以巡航升阻比為目標;考慮不改變飛機基本配平,優化過程中對翼型的俯仰力矩和升力特性進行一定的限制,以不大于原始翼型低頭力矩的百分之二和大于初始升力系數為約束,優化變量、變化范圍和優化后結果見表1。
表1中δx和δy分別為襟翼向后和向下移動的量,以翼型弦長無量綱化,以點2原始位置為參考點,意義相當于縫道參數。Y1、Y2、Y3、Y7分別為點1、2、3、7在Y方向(高度方向)的位置,其中Y1以點1所在弦向位置原始翼型下翼面點為參考點,以點2與點1的高度差為無量綱化;Y2和Y7以相應位置的翼型高度為無量綱化,以相應位置下翼面點為參考點;Y3以點2和點5高度差為無量綱化,以點2為參考點。K3、K7分別代表點3、7的斜率(以可控角的范圍無量綱化)。經初步研究發現,點6~點7段和點3~點5段曲線的線型對優化結果影響較大,采用變化的形狀控制參數(即Q67和Q35);其它線段根據初步研究結果采用固定形狀控制參數。襟翼外形生成通常做法是在原始翼型的某個位置進行分割,為了更好地控制襟翼上表面局部壓力,本文將主翼和襟翼分割點進行分開設計,點6在點5的位置上進行適當調整,形成參數X6(以δx無量綱化)。

表1 優化參數和優化結果Table 1 Optimal parameters and their optimal results
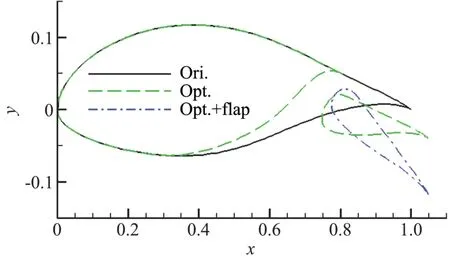
圖5 原始和優化翼型Fig.5 Geometry between the optimized airfoil and original one
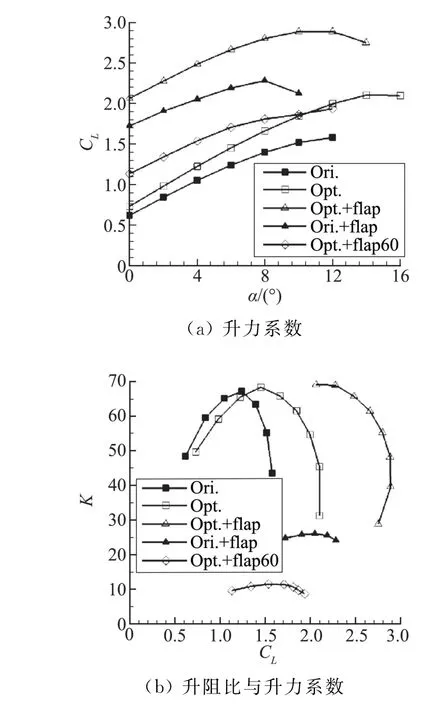
圖6 優化前后翼型氣動性能Fig.6 Performance between the optimized airfoil and original one
遺傳優化每代總群體規模數為144,雜交概率0.7,變異概率0.03,最大進化代數40代。
圖5給出了優化翼型和初始翼型的外形(黑色為原始翼型,綠色為改進后的兩段翼型,藍色為偏轉狀態襟翼);在優化翼型的基礎上,對其氣動特性進行評估,圖6給出了計算結果。優化結果表明,相對于原始翼型,兩段翼型升力線性段范圍增加,最大升力系數由1.5增加到2.1,襟翼無偏轉情況下最大升力系數增加40%;失速迎角增大,擴展了無人機的飛行包線,增強其抗風能力。在升阻比方面,滑跑狀態下(0°迎角,襟翼放下)優化后翼型升阻比得到大幅提升,從約25提升到69;襟翼無偏轉狀態最大升阻比大于原始翼型(由67.0增加到68.3),但受兩段翼型較大零升阻力的影響,較小升力下升阻比略低于原始翼型,在更大升力系數下(大于1.3),升阻比大于原始翼型。文獻[2]等研究表明,此類長航時無人機其續航升力系數的選擇與零升阻力有很大關系,本文研究對象的無人機最佳續航升力系數應該在1.3以上(Heron-1無人機巡航設計升力系數大于1.5),所以相對于原始翼型,優化后的兩段翼型更適合此類飛機。圖7給出了優化前后翼型續航因子與升力系數關系,結合升力曲線,在安全飛行包線內(1.2倍的失速速度),其最大續航因子由優化前的75.5提升到兩段翼型的85.0(提升了12.6%),根據文獻[2]等研究結果小幅度偏轉襟翼后續航因子還能進一步提升。
針對起飛要求,在相同襟翼偏轉下(20°),優化前后最大升力系數得到大幅提升,由原始翼型的2.2提高到2.9。進一步分析發現,升力提升只是一方面,由于原始翼型為了追求巡航升阻比,翼型后緣加載比較嚴重,襟翼偏轉后緣分離嚴重,在升力受到限制同時阻力急劇增加。過低的升阻比(圖6)嚴重影響到此類低推重比無人機的滑跑加速度;經研究發現由原始翼型生成的無人機有/無常規襟翼對無人機的滑跑距離影響有限,極大的限制了無人機的使用(如高原和短距起降)。優化設計后的兩段翼型則不存在上述問題,在取得大升力同時保持高的升阻比,即在降低離地速度同時還能提升無人機的滑跑加速度;相當于其起飛升力由原始翼型的1.4提升到2.7(由于受阻力影響,原始翼型使用無襟翼數據),改進后兩段翼型能極大的提升無人機的起飛性能。除此之外,襟翼的大角度偏轉,在保持一定升力,同時阻力增大(圖5中襟翼偏轉60°情況下升阻比降到10左右),其效果相當于阻力板,可以滿足著陸過程中的陡下滑和防止長距離飄移的大阻力(保持一定的升力)要求,具有集巡航、起飛和著陸多任務為一體的技術特點。
對優化變量進行分析發現,主翼后緣厚度Y7和控制點7斜率K7對兩段翼型的升阻比有直接影響,圖8給出了升阻比與這兩個參數關系。在目前的參數變化范圍內,隨著后緣厚度的降低,翼型升阻比提高,體現結構和氣動需綜合設計。通過厚度參數Y7并配合斜率參數K7變化能找到升阻比優化解,說明設置點7的高度位置和斜率作為控制點參數的合理性,研究表明形狀控制參數Q67其能很好適應后面襟翼外形,找到滿足要求的縫道外形。
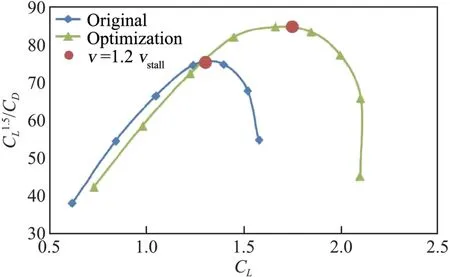
圖7 優化前后續航因子分析Fig.7 Comparison of endurance factors of airfoil
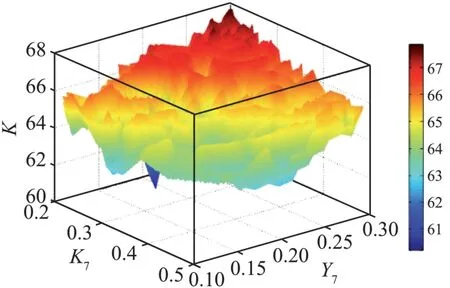
圖8 主翼后緣厚度對升阻比影響Fig.8 Effect of thickness on the lift-to-drag
圖9給出設計翼型壓力分布,并與文獻[7]所用方法進行對比,如前面翼型生成方法所論述的,由于本文所采用的原始翼型后緣彎度較大,原始翼型大彎度下表面和與其相切的頭部曲線會使襟翼頭部下表面出現低壓值,同時在頭部上表面反倒出現高壓(簡單曲線難以適應縫道流場),影響了翼型的氣動特性;文獻[5]方法也會出現類似現象,其主要原因與本文的初始翼型外形參數有關。直接切割方法和控制參數少難以使縫道內及襟翼前緣表面同時達到合理的壓力分布;而本文采取方法控制點和控制參數更多,控制點和形狀控制參數協調工作提高外形的生成能力和對原始翼型適應性能力;于此同時,外形參數和縫道參數同時優化提升翼型的氣動性能。
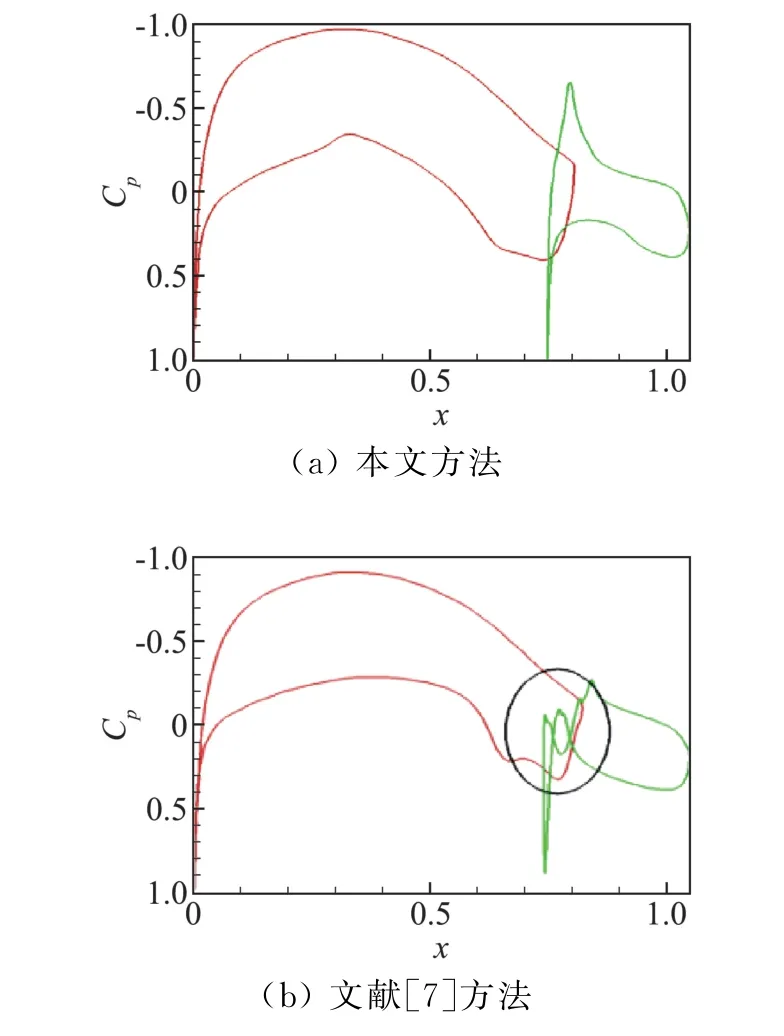
圖9 兩段翼型壓力分布Fig.9 Pressure distribution of the two-element airfoil
在巡航狀態的基礎上,結合襟翼舵機功率(壓力分布決定舵機功率)和飛機安裝位置的約束給出轉軸位置的限制范圍,對轉軸位置進行優化設計,確定無人機轉軸位置和起飛狀態構型。優化所用方法與巡航狀態優化設計基本一致,表2給出了優化參數和優化結果,在優化結果的基礎上開展起飛狀態不同迎角氣動性能評估(圖6)。
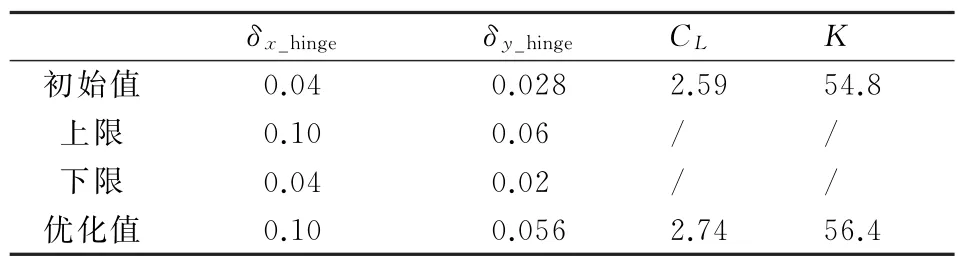
表2 優化參數和優化結果Table 2 Optimal parameters and their optimal results
3 結 論
在單段翼型的基礎上,本文采用控制點加分段可控二次曲線方法構建外形,并對生成外形的控制參數、縫道參數和轉軸位置進行優化,完成兩段翼型設計和性能評估,主要形成以下結論:
(1)相比于常規直接切割法,本文采用的方法控制點和控制參數更多,其對原始翼型適應性更好,生成的翼型壓力分布更加合理,更適合多目標優化設計;
(2)相比于原始翼型,新設計兩段翼型的續航因子、起飛升力和起飛升阻比得到大幅提升;
(3)襟翼大角度偏轉在保持一定升力同時阻力大幅增加,起到了阻力板作用,利于無人機下滑和著陸減速。
新設計的兩段翼型可以滿足巡航、短距起降的多設計點要求,對中空長航時無人機設計具有重要意義。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16