基于激光雷達技術的智能間隙探測系統適應性分析
2019-12-28 07:31:32張世勇李曉寧
城市軌道交通研究 2019年12期
關鍵詞:智能
陳 卓 張世勇 李曉寧
(1.北京市軌道交通建設管理有限公司,100068,北京;2.城市軌道交通全自動運行系統與安全監控北京市重點實驗室,100068,北京//第一作者,高級工程師)
我國城市軌道交通的全自動運行線路越來越多,采用全自動運行系統的列車未來將不配置司機,車站站臺門與列車車門之間的縫隙內是否有障礙物,將會極大地影響到全自動運行線路的行車組織和安全運營。本文介紹一種新型的、能夠滿足全自動運行線路需求的激光雷達智能間隙障礙物探測系統。
1 城市軌道交通車站既有間隙防護與探測技術
目前,車站站臺門與列車車門間隙防護與探測裝置主要有物理防護裝置和電氣探測裝置兩類。物理防護裝置包括站臺門滑動門軌道側傾斜防護斜擋板和防護橫撐、防夾擋板、防踏空裝置、車尾燈帶(輔助司機瞭望);電氣探測裝置主要為紅外探測裝置和激光探測裝置。電氣探測裝置利用的是光的直線傳播原理,設置發射端和接收端,通過光線是否被障礙物遮擋來判斷是否存在障礙物。
1)防夾擋板。安裝位置位于滑動門軌道側,固定在豎向門框底部。在滑動門關門過程中遇到障礙物時可阻止門體的關閉。具有結構簡單、安裝方便、造價低的特點。滑動門關閉后,防夾擋板將失去防護功能。目前國內城市軌道交通車站站臺門均配置了防夾擋板,應用較為廣泛。
2)防護橫撐。安裝于滑動門軌道側,固定在豎向門框之間,主要用于縮小滑動門門框與滑動門上的玻璃之間約50 mm的間隙。具有結構簡單、安裝方便、造價低的特點。但是其無法防護滑動門門框外緣與車輛限界的間隙,會在一定程度上影響站臺門的通透性。由于加裝防護橫撐會影響門體的美觀性,目前僅試點安裝。
3)防踏空裝置。安裝在滑動門門檻的側面。縮小站臺板與車體的間隙,防止乘客在上下車的過程中掉入到列車和站臺門門檻之間的縫隙。具有結構簡單、安裝方便、造價低的特點。防護范圍小,僅能防護站臺板與車體部位的間隙。目前國內城市軌道交通車站站臺門位置均配置了防踏空裝置,應用較為廣泛。
4)車尾燈帶。安裝于車站進站端、站臺門端門外,采用獨立支架安裝或安裝于站臺門立柱側面。站臺門與車門關閉后,列車發車前,由司機通過車尾燈帶瞭望車門與站臺門間隙。結構簡單、安裝方便、造價低。距離較長時,車尾燈帶的效果降低。在曲線車站及司機室無司機時,車尾燈帶失去其防護功能。目前國內城市軌道交通新線均配置了車尾燈帶,應用較為廣泛。
5)激光(紅外)對射探測裝置。安裝于站臺門與車門間隙內,采用獨立支架安裝。當激光或紅外光被障礙物遮擋后,探測系統會自動報警。安全性較高,適應曲線車站、全自動運行線路有人和無人值乘的工況。其缺點是:存在一定的誤報率;由于探測介質為線束,存在盲區,存在安裝隱患;對行車和運營有一定影響;受限界條件影響大。
2 新型激光雷達智能間隙障礙物探測系統
2.1 必要性分析
中國城市軌道交通協會于2019年8月發布的《中國城市軌道交通全自動運行系統技術指南(試行)》中要求:在全自動運行條件下,宜設置站臺門與列車間隙探測裝置;間隙探測裝置的安裝位置應滿足工程限界要求,不得侵入列車動態包絡線,確保行車安全;間隙探測裝置應與信號系統直接接口,接收信號系統提供的有效探測啟動指令,并將障礙物探測結果信息納入信號控制作為發車條件。
根據規劃,北京地鐵新線將均采用全自動運行系統,將不再配置司機。物理防護措施本身的防護能力有限,僅能作為輔助措施,而傳統的電氣探測裝置存在技術局限性,激光(紅外)對射探測裝置存在盲區、易受干擾等問題。因此,研發一種新型的、基于激光雷達的智能間隙障礙物探測系統,以滿足全自動運行技術條件下的障礙物探測要求是必要的。
2.2 可行性分析
為解決激光(紅外)對射間隙探測裝置存在的安裝位置易侵入列車動態包絡線、有盲區、易受干擾等問題,新型的間隙探測系統應安裝于站臺門軌道側站臺上,或者站臺門頂部的安裝梁,以避開列車的限界。對于盲區的問題,新型的間隙探測系統對于障礙物探測應從線到面提升到三維,全面無死角地探測列車車門和站臺門間隙的障礙物,目前激光雷達技術可以有效解決障礙物探測的盲區問題。
2.2.1 激光雷達技術
雷達是一種利用電磁波探測目標位置的電子設備。目前的雷達主要分為激光雷達與微波雷達。激光雷達與微波雷達相比具有角分辨率高、速度分辨率高、距離分辨率高、抗干擾能力強、隱蔽性好等優點、激光不受無線電波干擾、適用于復雜電磁環境等特點,因此激光雷達可以適應城市軌道交通復雜的電磁環境。
激光雷達的波長短,可以在分子量級上對目標進行探測,可以滿足規范要求的對20 mm大小障礙物的探測。在功能相同的情況下,激光雷達比微波雷達體積小、質量輕,占用安裝空間小,能滿足限界要求。
激光雷達是工作在光頻波段的雷達。與微波雷達的原理相似,利用光頻波段的電磁波先向目標發射探測信號,然后將其接收到的同波信號與發射信號進行比較,從而獲得目標的位置(距離、方位和高度)、運動狀態(速度、姿態)等信息,實現對目標的探測、跟蹤和識別。
激光雷達由發射、接收和后置信號處理三部分以及使此三部分協調工作的機構組成。激光光速發散角小、能量集中,探測靈敏度和分辨率高。
激光雷達的空間掃描方法可分為非掃描成像體制和掃描成像體制。非掃描成像體制同掃描成像體制的單元探測有所不同,采用多元探測器,作用距離較遠,能夠減小設備的體積和質量。但在我國,多元傳感器尤其是面陣探測器很難獲得,因此國內激光雷達多采用掃描成像體制。掃描成像體制的激光雷達是可以滿足間隙探測系統要求的。
激光雷達發射機主要有半導體激光器、半導體泵浦固體激光器和氣體激光器等。激光雷達的接收單元由接收光學系統、光電探測器和回波檢測處理電路等組成,其功能是完成信號能量匯聚、濾波、光電轉變、放大和檢測等功能。
2.2.2 激光雷達應用的可行性
激光雷達技術主要應用于空間掃描、測距等方面。激光雷達技術應用于城市三維建筑模型,可以快速完成三維空間數據采集。在汽車及交通運輸領域,激光雷達主要應用于自動泊車、ACC(自適應巡航控制)、自動剎車、無人駕駛、智能交通信號控制、交通事故勘查等方面。在城市軌道交通系統中,激光雷達主要應用于安防系統,作為周界防護的一部分。
從激光雷達技術及其應用現狀來看,研發基于激光雷達技術的、滿足城市軌道交通全自動運行線路需求的智能間隙探測系統是可行的。激光雷達智能間隙探測系統可以實現對列車車門和站臺門間隙探測由線到面、由面到三維的覆蓋,進而提升對全自動運行線路列車車門和站臺門間隙探測的安全性、穩定性和可靠性。
2.3 激光雷達技術間隙探測原理
基于激光雷達技術的智能間隙探測系統,利用激光雷達作為末端探測裝置,安裝于軌行區站臺門頂部或者底部,通過自帶應用軟件可實現對探測到的障礙物信息進行收集、分析、判斷并預警。
激光雷達智能間隙探測系統由激光雷達旋轉光學機構將激光脈沖向掃描角度內的各個方向掃描而形成二維掃描面,通過多層光幕,對列車車門和站臺門之間的障礙物進行三維成像;計時器測定激光束從發射到接收的時間差,根據光的傳播速度,處理器會把延遲時間轉換成相應的距離,并記錄存儲激光回收數據;通過軟件模擬計算,并與邊界條件進行對比分析,進而確定遮擋物的大小及位置信息。
探測原理為:激光雷達探測器內置馬達高速運轉,將一定強度的激光,通過一定角度的光學機構發射出如圖1所示的二維扇形光幕;通過多層光幕,照射到障礙物表面后發生漫反射;部分光會損失掉,另一部分光反射回激光探測器,使得物體進行三維成像;當反射回來的光達到一定設定閾值,就可以作為判斷依據;閥值由激光雷達探測器內部模擬分析軟件算法進行定義。
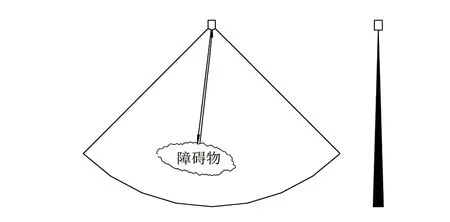
圖1 激光雷達光幕示意圖
2.4 城市軌道交通應用環境的基本要求
激光雷達智能間隙探測系統,應滿足城市軌道交通運營環境下(包括振動環境、空氣環境、濕度、溫度環境等)的探測要求;應設置獨立的監控主機,能自行監測其狀態信息和探測結果,具有人機交互的顯示屏,能實時查看系統狀態、報警記錄、設定參數,具備一定的存儲功能,其數據應能進行下載;應能探測到光斑范圍檢測邊長不小于20 mm的物體,且物體在運動過程中遮擋住激光探測報警器時,系統也能輸出報警信息;設置在軌道側,最外邊緣到軌道中心線的距離應滿足限界要求,不得侵入車輛限界影響列車運行;應能把一側站臺所有的探測信號總成為一個探測信號上傳到信號系統,實現與信號系統的聯鎖;應具有旁路功能,設置有旁路開關以及獨立的聲光報警裝置;可以實現車站站臺就地監測,探測結果信息也應能上傳到信號系統/綜合監控系統;設置應滿足國家相關規范及法規要求;應具有國家相關檢測部門出具的符合GA/T 1158—2014《激光對射入侵探測器技術要求》的檢測報告;需進行安全完整性認證,且不低于SIL2級。
2.5 全自動運行線路應用的基本要求
1)探測區域。以列車的每個車門或者以每列列車為一個探測區域,站臺滑動門旁邊的固定門區域也應納入探測范圍。在站臺固定門位置若有障礙物,探測系統應能精確定位該障礙物的位置,以方便車站工作人員應急處理;某個位置的探測裝置出現故障時,可以單獨進行旁路,不影響其他區域內的探測裝置的使用。
2)探測精度。激光光幕是由一定數量呈扇形分布的激光射線組成,射線之間存在一定的夾角,同時激光射線自身也存在一定的發散角,因此,在探測區域的遠端,激光射線形成光斑,光斑與光斑之間存在一定的間隙,此間隙的大小是影響激光雷達的探測精度的主要因素。此間隙的大小,可以在激光雷達硬件選型時予以定制。可參考激光(紅外)對射探測裝置的精度要求:應能檢測邊長不小于20 mm的物體,且物體在運動過程中發生遮擋時,系統也能輸出報警信息。建議激光雷達智能間隙探測系統的精度與激光(紅外)對射探測裝置的精度保持一致。
3)安全防護等級。對于全自動運行線路,激光雷達智能間隙探測系統需獨立接入信號系統,參考《城市軌道交通全自動運行系統技術規范》及國內類似工程對站臺門系統安全防護等級的要求,該系統需進行安全完整性認證,且安全等級不低于SIL2級,以提高系統的安全性。
2.6 激光雷達智能間隙探測系統技術方案
激光雷達智能間隙探測系統主要由激光雷達探測器、控制主機、就地控制器等組成,如圖2所示。

圖2 激光雷達智能間隙探測系統構成示意圖
1)激光雷達探測器。負責執行探測功能;自帶模擬計算軟件,可確定遮擋物的大小及位置信息;安裝在站臺門頂部,每道門設置一組激光雷達。
2)控制主機。設置在站臺門設備室,是激光雷達探測系統的控制中樞;負責控制雷達探測器的啟停、障礙物信息報警及上傳;負責監測系統的運行狀態及故障信息;提供系統與相關接口專業的接口位置。
3)就地控制器。位于車頭位置端門外或者站臺門系統PSL(就地控制盤)旁,具備障礙物信息的聲光報警提示、系統旁路操作等功能。
激光雷達智能間隙探測系統獨立成系統,信號系統在發送站臺門關門命令的同時發送“啟動探測”命令給激光雷達智能間隙探測系統,激光雷達智能間隙探測系統收到信號系統的命令后啟動工作。信號系統在發出“啟動探測”命令后開始計時5 s(可調);一旦檢測到激光雷達智能間隙探測系統反饋的“有障礙物信息”,重新啟動計時;直到持續5 s(可調)計時內一直沒有檢測到障礙物且站臺門及車門關閉鎖緊后,允許發車。否則信號系統不允許發車,并通知人工處理。
激光雷達智能間隙探測系統至少具備如下功能:激光雷達探測器配置模擬軟件,具備邊界條件自學習功能;具備障礙物探測功能,能精準定位障礙物所在的滑動門位置;系統接入信號系統并具備獨立的旁路功能;系統具備故障自診斷并報警功能、運行狀態顯示及聲光報警提示功能、事件及報警記錄自動存儲及查詢功能;具備手動和自動兩種操作模式。
激光雷達的光源應為不可見光,不對人體造成傷害,且滿足相關國家標準的要求;有效探測距離不小于5 m;光幕應為多層,扇形光幕角度不小于90°。
使用激光雷達終端數量不同,系統的造價不同。以8A編組列車為例,對于島式車站,每列車設置一組激光雷達探測器,含主機及軟件等的激光雷達智能間隙探測系統單車站的造價約為120萬元。在系統成熟后,通過優化激光雷達探測器終端數量,可以大大降低單站的系統造價,滿足今后的推廣應用。
3 結語
綜上分析,基于激光雷達技術的智能間隙探測系統應可適用于城市軌道交通列車車門和站臺門間隙的障礙物探測,但需經實地檢驗和測試。經各類檢測和認證之后,該系統才能應用于城市軌道交通現場項目中。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
