國產某純電動汽車操縱穩定性測試及評價
2019-12-27 03:52:38張曉龍熊樂吳云兵李憲斌
汽車實用技術 2019年24期
張曉龍,熊樂,吳云兵,李憲斌
國產某純電動汽車操縱穩定性測試及評價
張曉龍1,熊樂2,吳云兵2,李憲斌2
(1.中國汽車技術研究中心有限公司,天津 300300;2.中汽研汽車檢驗中心(寧波)有限公司,浙江 寧波 315336)
操縱穩定性是汽車安全性能的重要組成部分,現代汽車檢測技術是推動汽車產業發展的重要因素。文章闡述了操縱穩定性試驗的道路試驗方法,并簡要介紹了操穩試驗的測試變量及測試設備。根據汽車產品定型試驗要求,對某國產純電動汽車的轉向回正性能試驗、轉向輕便性試驗及穩態回轉試驗開展研究。操穩試驗評價結果表明:該國產純電動汽車操控性能表現優異,達到了同級產品的標桿水平。
純電動汽車;操縱穩定性;測試;評價
前言
當前,全球汽車產業正朝著電動化、智能化等方向迅猛發展,電動汽車的主動安全性能是汽車領域研究的熱點問題。操縱穩定性是汽車主動安全性能的重要組成部分,它不僅影響汽車駕駛的操縱方便程度,而且也是決定高速汽車安全行駛的一個主要性能,所以人們稱之為“高速車輛的生命線”[1]。
在操縱穩定性研究過程中,試驗樣車性能參數的測量技術是我們獲得車輛響應的重要手段,現代汽車檢測技術是推動汽車產業發展的重要因素。因此,如何通過有效的測量技術手段準確地采集車輛響應數據,對車輛的試驗和評價有重要意意義[2]。
本文以某國產純電動汽車為研究對象,根據汽車產品定型試驗要求,對試驗樣車的轉向回正性能試驗、轉向輕便性試驗及穩態回轉試驗開展研究,并對試驗結果進行分析與評價。
1 道路試驗方法
道路試驗是研究車輛操縱穩定性的基本手段,道路試驗方法對試驗樣車的測試結果有重要影響。
1.1 試驗標準
為了制定統一的汽車操縱穩定性試驗標準,國際標準化組織(ISO)制定了ISO 3888-1 《乘用車—急劇變道操作的試驗車道—第一部分:雙車道變換》、ISO 7401 《道路車輛—橫向瞬態響應試驗方法—開環試驗方法》、ISO 3888-1 《乘用車—急劇變道操作的試驗車道—第二部分:避障》及ISO 4138 《乘用車—穩態圓周行駛—開環試驗方法》等試驗標準。
我國于1994年參照ISO標準制定了GB/T 6323-1994 《汽車操縱穩定性試驗方法》,并在2014年發布實施了新修訂的標準GB/T 6323-2014 《汽車操縱穩定性試驗方法》。當前,我國企業與檢測機構主要依據GB/T 6323-2014和QC/T 480-1999兩項標準對汽車新產品進行定型試驗[3-4]。
1.2 試驗方法
1.2.1 轉向回正性能試驗
轉向回正性能試驗包括低速回正試驗和高速回正試驗。試驗按向左轉和向右轉兩個方向進行,每個方向三次。
低速回正試驗是指車輛以(4±0.2)2側向加速度沿半徑為15m的圓進行穩態行駛時,迅速松開方向盤,記錄松手后至少4s的汽車運動過程,記錄時間內油門踏板位置保持不變。
高速回正試驗是指車輛以最高車速的70%并四舍五入為整數倍的車速直線行駛時,轉動方向盤使得車輛側向加速度達到(2±0.2)2,穩定一段時間后迅速松開方向盤,記錄松手后至少4s的汽車運動過程,記錄時間內油門踏板位置保持不變。
1.2.2 輕便性試驗
轉向輕便性又是汽車操縱穩定性的重要方面。駕駛員控制汽車行駛方向時,轉向盤所需轉向力的大小應適度,與汽車改變方向的運動狀態有對應關系,保證有“清晰”的“路感”,轉向過重或過輕都不利于駕駛員駕駛操作[5]。
輕便性正試驗是指駕駛員操縱方向盤,使車輛以(10±2)的車速沿雙紐線行駛,汽車沿雙紐線行駛一周至記錄起始位置,即完成一次試驗,全部試驗應進行三次。
1.2.3 穩態回轉試驗
穩態回轉試驗是汽車操縱穩定性測試中最基本的方法。穩態回轉試驗是指車輛以最低穩定車速沿著半徑為15m的圓行駛,穩定一段時間后,緩慢而均勻地加速,直至側向加速度達到6.52(或受發動機功率限制而能達到的最大側向加速度、或汽車出現不穩定狀態)為止。整個試驗記錄過程中,方向盤轉角保持不變,試驗按向左轉和向右轉兩個方向進行,每個方向試驗三次。
1.3 試驗條件
試驗場地應為干燥、平坦而清潔的,用水泥混凝土或瀝青鋪裝的路面,任意方向的坡度不應大于2%。試驗時,風速應不大于5,大氣溫度在0℃~40℃范圍內。
試驗前,測量測量定位參數。對轉向系、懸架系統進行檢查、調整和緊固,按規定進行潤滑。采用新輪胎試驗,試驗前應至少經過200km正常進行的磨合;若使用舊輪胎,試驗終了時殘留輪胎花紋深度不小于1.6mm。輪胎氣壓符合汽車出廠技術要求。試驗前,以試驗車速直線行駛10km,或者沿半徑為15m的圓周、以側向加速度達到32的相應車速行駛500m(左轉與右轉各進行一次),使輪胎升溫。
轉向回正性能試驗、轉向輕便性試驗及穩態回轉試驗載荷狀態為最大設計總質量和輕載兩種狀態。輕載狀態指汽車整備質量狀態除駕駛員、試驗員及儀器外,沒有其他加載物的狀態。對于承載能力小的汽車,如果輕載質量已超過最大總質量的70%,則不必進行輕載狀態的試驗。試驗車輛的裝載物分布應符合GB/T 12534中3.1的規定[6]。
2 測試設備
2.1 測試變量及要求
表1 操穩試驗測量變量及評價指標
表2 試驗測試變量的范圍及要求
表1給出了轉向回正性能試驗、轉向輕便性試驗及穩態回轉試驗的測試變量、數據處理中需要繪制的變量特性圖及評價指標。操縱穩定性試驗主要的測量變量包括車輛前進速度、側向加速度、橫擺角速度、側傾角、方向盤轉角及方向盤力矩[7]。
操縱穩定性試驗測試變量較多,且對數據測量系統要求較高,主要測試變量的范圍及要求如表2所示。
2.2 測試設備簡介
為滿足試驗方法及測量變量精度要求,道路試驗設備采用英國Racelogic公司的VBOX3i數據采集器、IMU04型慣性陀螺儀和日本SOHGOHKEISO公司的TR60-200Nm型方向盤測力計系統。
2.2.1 數據采集器
VBOX3i雙天線數據采集器(VB3iSL)是Racelogic公司生產的GPS數據記錄系統。通過利用“固定基線RTK裝備”中的兩個GPS引擎配置,VB3iSL結合了高精度和測試可重復性,能以100Hz的速率測量側滑角和俯仰/側傾角。數據可以實時顯示(利用USB/RS232串行連接線)并直接記錄數據到閃存卡易于傳輸到PC機上。
VB3iSL包括4個可以從外部傳感器記錄數據的高分辨率模擬輸入通道和2路CAN總線接口可以在連接Racelogic輸入模塊同時通過第二個CAN總線同步傳送GPS數據,VBOX3i數據采集器輸入/輸出如圖1所示,接口如圖2所示。
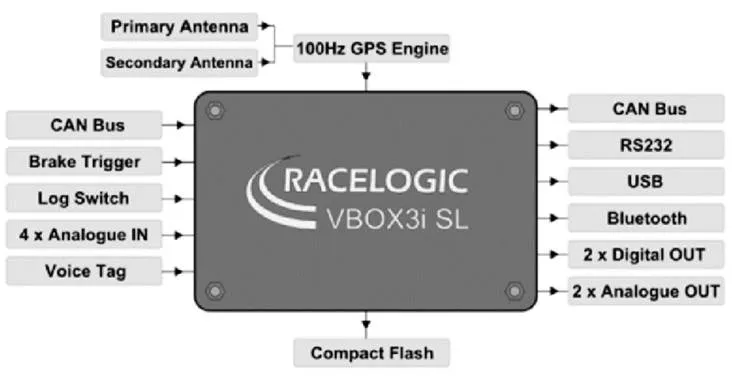
圖1 VBOX3i數據采集器輸入/輸出

圖2 VBOX3i數據采集器接口
2.2.2 慣性陀螺儀
IMU04模塊是VBOX3i數據采集器的輔助設備,IMU04慣性陀螺儀能夠采集樣車的縱向加速度、側向加速度、橫擺角速度等試驗參數。為了確保同步,供電前IMU04慣性陀螺儀必須要連接到VBOX3i數據采集器。

圖3 IMU04慣性陀螺儀
2.2.3 方向盤測力計系統
轉向輕便性試驗需要采集樣車的轉向盤轉角及轉向盤力矩,日本SOHGOHKEISO公司的TR60-200Nm型方向盤測力計系統通過25針接口與VBOX3i數據采集器連接,便可實現上述參數的采集。
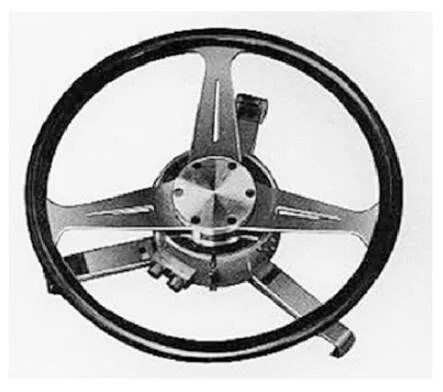
圖4 方向盤測力計系統
3 測試結果分析及評價
3.1 測試結果分析
道路試驗樣車為某國產純電動汽車,樣車參數如表3所示。
表3 道路試驗樣車參數

3.1.1 轉向回正試驗結果
低速轉向回正試驗的試驗結果如表4所示。圖5為左轉第一次橫擺角速度時間歷程曲線,圖6為右轉第一次橫擺角速度時間歷程曲線。
表4 低速轉向回正試驗結果

高速轉向回正試驗的試驗結果如表5所示。圖7為左轉第一次橫擺角速度時間歷程曲線,圖8為右轉第一次橫擺角速度時間歷程曲線。
從試驗結果及曲線可以看出,轉向回正性能試驗的橫擺角速度時間歷程曲線趨于收斂,且在較短時間達到穩定狀態,殘留橫擺角速度控制在合理范圍內。

圖6 右轉第一次橫擺角速度時間歷程曲線
表5 高速轉向回正試驗結果
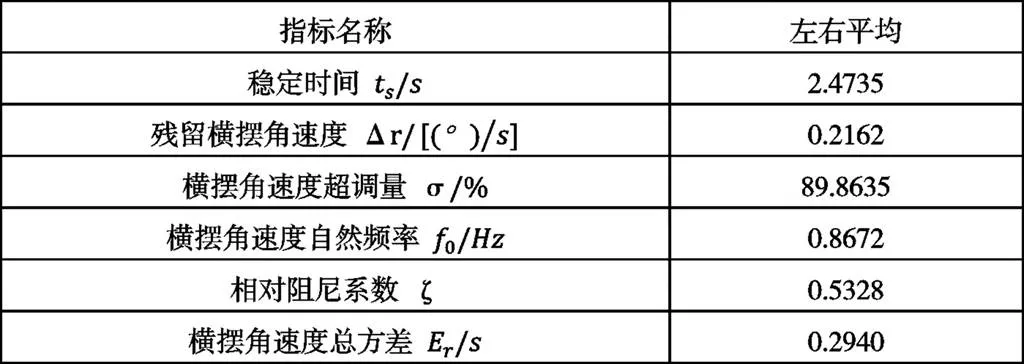

圖8 右轉第一次橫擺角速度時間歷程曲線
3.1.2 輕便性試驗結果
輕便性試驗的試驗結果如表6所示。圖9為第一次轉向盤轉角與力矩曲線。
表6 輕便性試驗結果

從表6可以看出,樣車方向盤平均作用力控制在10N左右,保證了較小的轉向力,同時駕駛員能感受到較好的路感反饋。
3.1.3 穩態回轉試驗結果
穩態回轉試驗的試驗結果如表7所示。圖10為第一次轉向盤轉角與力矩曲線,圖11為第一次前后軸側偏角差與力矩曲線,圖12為第一次側傾角與力矩曲線。
表7 穩態回轉試驗結果


圖11 左轉第一次前后軸側偏角差與側向加速度曲線

圖12 左轉第一次側傾角與側向加速度曲線
從上述試驗結果及曲線可以看出,樣車具有適當的不足轉向性能,且車身側傾角控制在合理范圍內,具有優秀的穩態轉向特性。
3.2 測試結果評價
3.2.1 轉向回正試驗評價
轉向回正試驗按殘留橫擺角速度Δ及橫擺角速度總方差E兩項指標進行評價計分。對于進行低速與高速回正性能試驗對的汽車,其綜合評價計分值按式(1)計算。

式中:
N——轉向回正試驗的綜合評價計分值;
N——低速回正試驗的殘留橫擺角速度Δ的評價計分值;
N——低速回正試驗的橫擺角速度總方差E的評價計分值;
N'——高速回正試驗的殘留橫擺角速度Δ的評價計分值;
N'——高速回正試驗的橫擺角速度總方差E的評價計分值。
3.2.2 輕便性試驗評價
輕便性試驗按轉向盤平均操舵力F與轉向盤最大操舵力F兩項指標進行評價計分,輕轉向輕便性試驗的綜合評價計分值按式(2)計算。

式中:
N——轉向輕便性試驗的綜合評價計分值;
N——轉向盤平均操舵力F的評價計分值;
N——轉向盤最大操舵力F的評價計分值;
η=0.6+0.08G——與汽車總質量G(單位t)有關的加權系數。
3.2.3 穩態回轉試驗評價
穩態回轉中性點的側向加速度a、不足轉向度與車身側傾角K三項指標進行評價計分,轉向回正試驗的綜合評價計分值按式(3)計算。

式中:
N——穩態回轉試驗的綜合評價計分值;
N——中性轉向點的側向加速度a的評價計分值;
N——不足轉向度U的評價計分值;
N——車身側傾角的評價計分值。
3.2.4 穩操縱穩定性試驗評價
根據操縱穩定性試驗測試結果,對前述三項試驗逐一進行單項,最終評價計分結果為三項試驗單項計分的平均值,整理如表8所示。
表8 操穩評價計分結果總表

從上述結果可以看出,該國產純電動汽車操縱穩定性總評分達到了92.5,遠遠超過60分的及格線,表現出優異的操縱性能,特別是在穩態回轉試驗中的車身姿態控制和轉向輕便性表現兩方面。
4 結論
本文闡述了操縱穩定性試驗的道路試驗方法,并簡要介紹了操穩試驗的測試變量及測試設備。根據汽車產品定型試驗要求,對某國產純電動汽車的轉向回正性能試驗、轉向輕便性試驗及穩態回轉試驗開展研究。操穩試驗評價結果表明:該國產純電動汽車操控性能表現優異,達到了同級產品的標桿水平。
[1] 余志生.汽車理論(第6版)[M].北京:機械工業出版社,2018.
[2] 曹建永.基于人-車-路閉環系統的汽車操穩試驗及評價方法研究[D].上海交通大學,2015.
[3] GB/T 6323-2014 汽車操縱穩定性試驗方法[S].
[4] QC/T 480-1999 汽車操縱穩定性指標限值與評價方法[S].
[5] 高軍等.汽車轉向輕便性試驗數學解析研究[J],合肥工業大學學報(自然科學版),2012年第4期:467-471.
[6] GB/T 12534-1990汽車道路試驗方法通則[S].
[7] 郭潤清等.汽車操縱穩定性道路試驗和評價系統設計[J],北京汽車,2015年第1期:37-41.
Test and Evaluation of Handling Stability of a Domestic Pure Electric Vehicle
Zhang Xiaolong1, Xiong Le2, Wu Yunbing2, Li Xianbing2
( 1.China Automotive Technology and Research Center Co. Ltd., Tianjing 300300;2.CATARC Automotive Test Center (Ningbo) Co. Ltd., Zhejiang Ningbo 315336 )
Handling stability is an important component of automobile safety performance. Modern automobile test technology is an important factor to promote the development of automobile industry. This paper has interpreted the road test method of handling stabilityt, and has briefly introduces the test variables and test equipment of handling stability test. According to the requirements of automobile product stereotyping test, the steering restoring test, steering efforts test and steady-state circular test of a domestic pure electric vehicle are studied. The evaluation results of handling stability test show that the performance of the domestic pure electric vehicle is excellent, reaching the benchmark level of the same grade products.
PEV; Handling Stability; Test; Evaluation
U467.1
A
1671-7988(2019)24-26-05
U467.1
A
1671-7988(2019)24-26-05
10.16638/j.cnki.1671-7988.2019.24.009
張曉龍(1978-),高級工程師,就職于中國汽車技術研究中心有限公司,研究方向:汽車被動安全。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
決策探索(2014年21期)2014-11-25 12:29:50
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
體育師友(2012年4期)2012-03-20 15:30:10
