地鐵CBTC信號系統設計分析
2019-12-25 01:14:48丁文君
無線互聯科技 2019年20期
丁文君
摘? ?要:文章基于通信的列車控制系統的設計原理,依據系統的移動閉塞功能分類,結合西安地鐵2號線的隧道運行情景,闡釋基于通信的列車控制系統的應用設計方案,重點分析了列車精準定位、虛擬占用及TDD-LTE移動通信技術的應用性,以為多列車混合運行的安全監測提供有效支撐。
關鍵詞:列車控制信號系統;移動閉塞;分時長期演進技術;信號干擾
1? ? CBTC系統的基本構成
基于通信的列車控制系統(Communication-Based Train Control,CBTC)源于歐洲連續式列車控制系統,隨著計算機、無線通信和自動化控制技術的發展,該系統在技術和應用上得到突破性的發展,并成為國內外城市軌道交通的神經中樞,是確保地鐵車輛安全運行的應用支撐。CBTC系統與軌道電路相互獨立,通常采用基于802.11系列協議的無線局域網(Wireless Local Area Networks,WLAN)組網,進行車地的雙向、連續、大容量數據通信,該種通信方式具有可移動、成本低、易于部署等特點,便于實現移動閉塞。
整體而言CBTC系統由地面設備和車載設備兩大模塊構成,且兩者可以通過數據通信網絡進行車地的雙向通信,以此構成整個系統的主體功能框架。系統中配設了自動列車監控系統(Automatic Train System,ATS),可用于監控列車運行、信號設備等情況,管理運行圖、排列進路。在CBTC系統中還設置了計算機聯鎖子系統,利用專門的控制軟件對車站信號、進路、道岔之間的聯鎖關系進行處理,并可自動采集、處理相關信號,將地鐵車站運行中的操控指令和信息輸入計算機,根據內置的計算條件便可實現對聯鎖關系的邏輯運算和判定,而后,可根據計算結果輸出,指令執行設備和機構完成對列車運行的監控。
2? ? CBTC系統的移動閉塞技術的模式分類
CBTC系統可基于車地雙向通信,通過連續檢測先行列車的位置和速度,實現移動閉塞,其應用設計原理是后續列車以前行列車尾部為追蹤目標點,在最小安全追蹤間隔距離下,實現安全運行。設定前后兩列車的最小間隔距離為S,其速度、減速度、空走時間各為V1,V2,B1,B2,T1,T2,據此可得:
結合式(1),CBTC系統移動閉塞模式下,若前行列車的B1減速度為無限大,T1空走時間為0,此時前后列車的最小安全間隔為:
利用式(2),可求解得出后續列車的安全運行速度,因為該移動閉塞模式無需考量前行列車的速度,僅需關注列車位置的處理方式,故而,定義為相對位置模式。同時,若式(1)中距離S給定,由前行列車的速度V1可獲得后續列車的速度V2,對相同車型而言,若空走時間一致,則列車間的速度可視為均衡,即行車間隔近似0,因為該模式以列車的限度速度及位置來確定后續列車的安全運行速度,故而,定義為相對速度模式。
3? ? CBTC系統在地鐵工程中的應用設計
根據上述分析,CBTC系統的移動閉塞技術存在不同的應用模式,而基于西安地鐵2號線工程運行穩定的要求,系統設計時采用相對位置的閉塞模式,通過自動環段、列車定位、分時長期演進(Time Division Long Term Evolution,TD-LTE)車地移動通信等技術,完成安全間隔內列車的安全運行,以縮短車輛運行距離,提高地鐵的承運能力。
3.1? 車地通信網絡的優化設計
結合西安地鐵2號線工程的特點,為滿足不同隧道情景的線路條件,簡化CBTC系統應用,該地鐵采用相對位置的移動閉塞模式,利用“車地通信”和“列車定位”技術,將地面設備和受控列車融合為一體,基于最小安全間隔來靈活調控列車運行能力,而不再依賴于軌道電路。此時,列車安全間隔為動態的,后續列車跟據前行列車的位置和速度而隨時變動,以確保列車的安全制動距離,規避“追尾”。鑒于CBTC系統的車地通信多采用802.11系列協議的WLAN組網,雖具有成本低、易部署的特點,但其多采用2.4 GHz或5.8 GHz頻段,且以天線、波導管及漏纜等作為通信媒介,而現有移動終端設備也采用2.4 GHz頻段,無法規避無線通信之間的干擾問題。針對此,可在原有WLAN基礎上,以兼容方式應用TDD-LTE移動通信技術,構建兩套TDD-LTE網絡承載CBTC系統的車地通信,在承載多業務和頻率資源的條件下,A網采用PIS 10 MHz帶寬,綜合承載CBTC系統、PIS、車載監控整設備的數據傳輸,B網另行運行5 MHz帶寬,以單獨承載CBTC業務的數據傳輸。
CBTC系統下,西安地鐵2號線的列車段線路原來布設為“燈泡線”,但是由于車地通信重新設計之后采用A網、B網冗余配置方案,即A,B網同時運行,軌旁AP天線方向在整個線路固定設置,列車頭尾對應軌旁的無線A網、B網固定配置天線,車載的A,B網天線只能與軌旁A,B網的AP天線進行通信,若列車通過“燈泡線”,轉向另一線路,可能產生車頭車載B網天線、車尾車載A網天線分別對應軌旁的無線A網、B網的AP天線,影響車地正常通信。為解決該問題,可在車頭車尾配設4個AP天線,通過自動換端實現A,B網的調換,確保車地的正常通信[1]。
3.2? 列車追蹤間隔設計
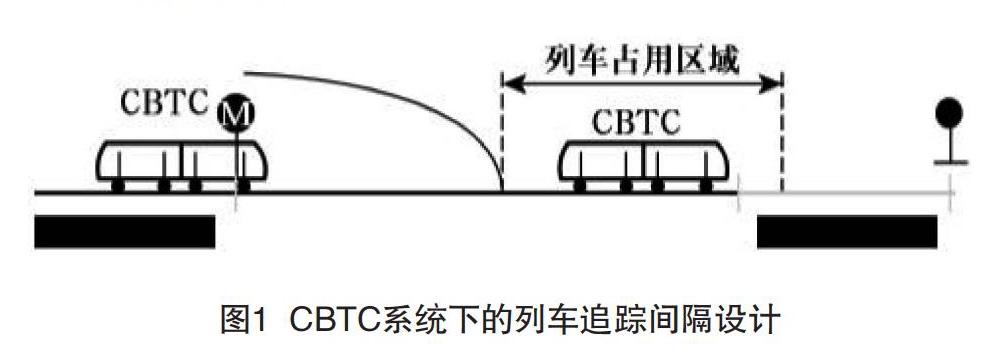
CBTC系統設計時,因移動閉塞存在不同應用模式,在西安2號地鐵中,在工期和運行穩定性的雙重要求下,該地鐵將采用相對位置的移動閉塞模式,利用系統坐標的概念描述列車位置。例如以“R1,S12,+24”描述了列車在1號區域、12號軌道單元、正向24 m位移的位置。運用軌旁置信標作為相對位置校驗,依據工程線路調配適宜的位置,將列車位置描述的誤差性控制在12 m。同時,通過CBTC系統模擬運行,西安2號地鐵列車的最小追蹤間隔為90 s,運行交路折返路的能力需達到105 s要求。移動閉塞技術應用下,設計的列車追蹤間隔如圖1所示。
CBTC在地鐵工程應用設計時,將聯鎖、計軸、信號機、信標、無線通信等軌旁設備融合為一體,讓CBTC系統可準確識別和判定進路中列車的位置,進而根據移動閉塞的追蹤間隔對裝備列車進行監控,并給予連續性ATP防護,對于存在通信故障的裝備列車、未裝備的列車均由司機根據站間閉塞要求控制列車,并給予防闖紅燈的防護。為實現兩種列車駕駛模式的自動切換和選擇,車載系統整合了CBTC設備和闖紅燈防護設備,如此,各列車可依據自身情況運行,在軌旁設備監控下不同列車可以混合運行方式獲得同步監控。
3.3? 列車位置精準定位設計
運行列車運行位置的精準定位,關系虛擬占用的形成、列車沖突點的設置、運行間隔的調整,故而,需對列車位置進行檢測和校驗。西安地鐵2號線在CBTC系統設計中,車載設備可采用測速傳感器,依據輪周長原理,計算列車位移,且為規避列車運行打滑空轉造成的位移誤差,利用多普雷達車輛位移檢測進行誤差補償。同時,為確保列車位置識別,可運用車載軌道數據庫中的電子地圖,融合地面信標讀取器的信標信息讀取,將讀取的信息與電子地圖對比,完成列車位置的定位[2]。
列車位置定位中,為實現精準定位和多列車移動閉塞區間內的安全運行控制,線路信息及軌旁設備安裝的精度設置如下:線路曲線及坡道信息為0.03 m,道岔岔尖位置為0.10 m,信號機位置為0.10 m;計軸器位置為0.10 m,標準信標位置為0.08 m,精確信標位置為0.025 m,輪徑效驗信標位置為0.08 m/0.06 m。
4? ? 結語
隨著城市軌道交通的創新建設,依托于計算機、無線通信技術發展而來的地鐵CBTC系統得以深化應用,而西安地鐵2號線正是采用該種移動閉塞的CBTC列車自動化控制系統。為實現系統的優化應用,完成列車位置準確定位、排除WLNA通信干擾問題,上述結合應用地鐵的特點,就CBTC系統運營過程中面臨的技術難題進行分析,從列車定位、追蹤間隔、車地雙向通信等幾個技術層面,進行了應用設計分析,可為相關問題的解決提供有效指引。
[參考文獻]
[1]趙劍華.一種集中冗余式架構CBTC系統方案的設想[J].鐵路通信信號工程技術,2019(8):65-68.
[2]丁軍.淺談地鐵信號系統的施工技術要點及調試[J].通訊世界,2019(8):70-71.
