基于AMEsim的熱軋帶鋼液壓活套建模與控制仿真
2019-12-20 03:03:30王智雷
價值工程 2019年33期
王智雷
摘要:熱軋帶鋼活套控制系統的優劣對軋制產品的質量與產量具有重大的影響。在實際軋制過程中,受各種因素的干擾,帶鋼張力并不等于液壓缸的輸出壓力,而是存在某種非線性關系。為了研究和解決液壓活套控制中的問題,本文提出了一種基于AMEsim搭建熱軋帶鋼液壓活套系統模型的方法,推導出液壓缸輸出壓力與帶鋼張力之間的數學關系。通過AMEsim建立液壓系統模型,由simulink建立控制系統模型,設計了專家PID控制器。聯合仿真表明系統具有較強的魯棒性。
Abstract:? The advantages and disadvantages of hot-rolled strip loop control system have a significant impact on the quality and yield of rolled products. In the actual rolling process, due to various factors, the strip tension is not equal to the output pressure of the hydraulic cylinder, but there is some nonlinear relationship. In order to study and solve the problems in the control of hydraulic looper, this paper proposes a method based on AMEsim to construct the hydraulic looper model of hot-rolled strip steel, and derives the mathematical relationship between the output pressure of the hydraulic cylinder and the tension of the strip. The hydraulic system model is established by AMEsim, and the control system model is established by simulink, and the expert PID controller is designed. Co-simulation shows that the system has strong robustness.
關鍵詞:液壓活套;專家PID控制器;AMEsim/matlab聯合仿真
Key words: hydraulic looper;expert PID controller;AMEsim/matlab co-simulation
中圖分類號:TP271? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1006-4311(2019)33-0157-03
0? 引言
活套系統是帶鋼熱連軋生產系統中的一個關鍵子系統,運行狀態的優劣對軋制產品的質量與產量都具有重大的影響。其主要的控制量是活套高度和帶鋼張力。活套高度控制是通過調節上游機架的電機速度達到很好的跟隨性能,而為了更好的控制帶鋼張力,最終保證機架間帶鋼的微張力軋制是通過控制液壓缸的壓力實現的。法國IMAGINE公司開發的AMEsim為流體(液體及氣體)、機械、控制、電磁等工程系統提供一個較完善的綜合仿真環境及靈活的解決方案[1]。
本文利用AMEsim搭建熱軋帶鋼液壓活套系統模型,由simulink建立控制系統模型,通過AMEsim/simulink聯合仿真對帶鋼張力控制進行了仿真分析。為進一步提高帶鋼張力控制提供了一種有效的研究方法。
1? 模型建立
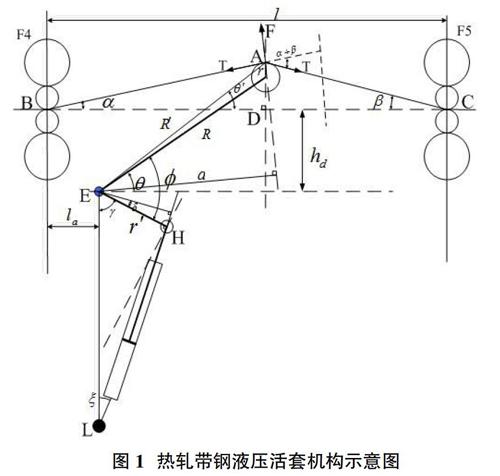
在每個精軋機機架之間都裝有一個活套,目的是為了確保帶鋼在兩機架之間有一個特定的張力。液壓活套機構示意圖如圖1所示。
圖1中各點定義如下:E-活套臂支撐點;L-液壓缸支撐點;AE -活套的工作臂(長度為R);EH-活套的動力臂(長度為r′);?茲-活套的角度;?準-動力臂與工作臂夾角(已知定值);?孜-液壓缸與垂直向夾角;?啄-活套動力臂切線與液壓力夾角;L,E是固定的,AE和EH的長度以及?準角是已知且不變的[2]。
1.1 液壓缸壓力與帶鋼張力間的關系
在實際軋制過程中,由于外界的干擾,負載張力會不斷的發生變化,并且所要控制的帶鋼張力不等于液壓缸的輸出壓力,而是存在某種非線性關系。下面我們將通過理論推導,得出液壓缸輸出壓力與帶鋼設定張力之間的關系式。
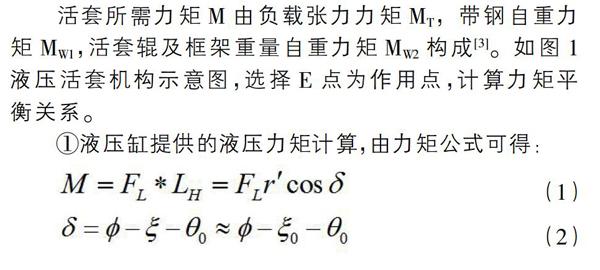
活套所需力矩M由負載張力力矩MT,帶鋼自重力矩MW1,活套輥及框架重量自重力矩MW2構成[3]。如圖1液壓活套機構示意圖,選擇E點為作用點,計算力矩平衡關系。
①液壓缸提供的液壓力矩計算,由力矩公式可得:
其中FL為液壓缸輸出力,LH為力臂;?茲0為活套工作角度最低值;?孜0是指?茲=?茲0時,液壓缸與豎直向的角度;考慮到在活套運動過程中,?孜變化量非常小,一般為計算方便可將其看作常數?孜0。
②張力力矩MT與活套角高度的關系。
張力力矩MT計算,由力矩=力*力臂以及三角函數積化和差公示,可以求得:
式中,MT為張力力矩;FT為合成張力;a為張力力臂。
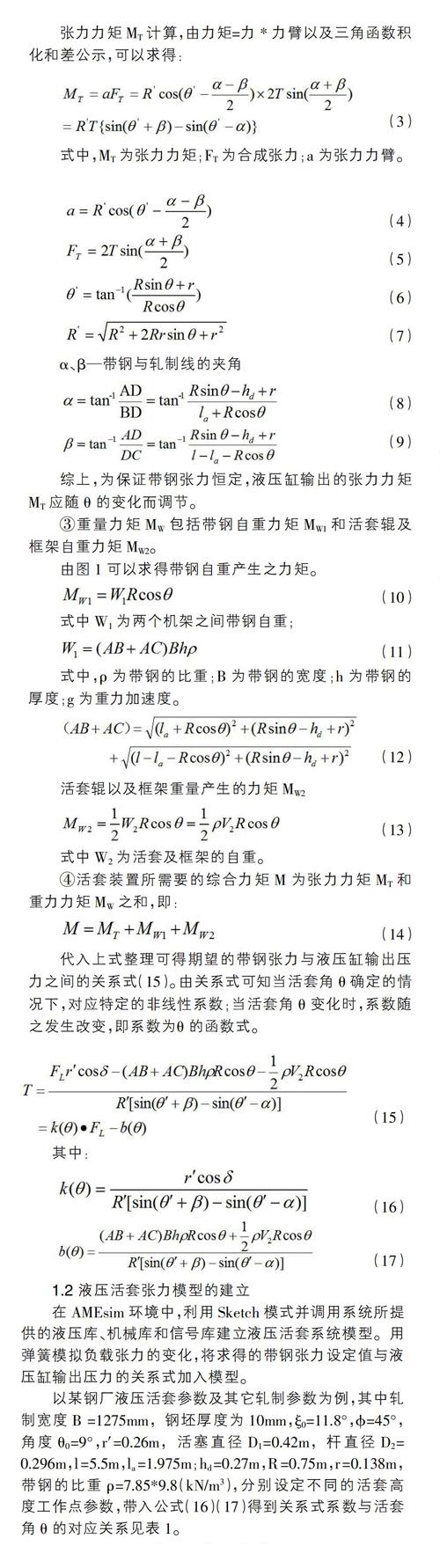
—帶鋼與軋制線的夾角
綜上,為保證帶鋼張力恒定,液壓缸輸出的張力力矩MT應隨?茲的變化而調節。
③重量力矩MW包括帶鋼自重力矩MW1和活套輥及框架自重力矩MW2。
由圖1可以求得帶鋼自重產生之力矩。
式中W1為兩個機架之間帶鋼自重;
式中,為帶鋼的比重;B為帶鋼的寬度;h為帶鋼的厚度;g為重力加速度。
活套輥以及框架重量產生的力矩MW2
式中W2為活套及框架的自重。
④活套裝置所需要的綜合力矩M為張力力矩MT和重力力矩MW之和,即:
代入上式整理可得期望的帶鋼張力與液壓缸輸出壓力之間的關系式(15)。由關系式可知當活套角?茲確定的情況下,對應特定的非線性系數;當活套角?茲變化時,系數隨之發生改變,即系數為?茲的函數式。
其中:
1.2 液壓活套張力模型的建立
在AMEsim環境中,利用Sketch模式并調用系統所提供的液壓庫、機械庫和信號庫建立液壓活套系統模型。用彈簧模擬負載張力的變化,將求得的帶鋼張力設定值與液壓缸輸出壓力的關系式加入模型。
以某鋼廠液壓活套參數及其它軋制參數為例,其中軋制寬度B =1275mm,鋼坯厚度為10mm,?孜0=11.8°,?準=45°,角度?茲0=9°,r′=0.26m,活塞直徑D1=0.42m,桿直徑D2=0.296m,l=5.5m,la=1.975m;hd=0.27m,R=0.75m,r=0.138m,帶鋼的比重?籽=7.85*9.8(kN/m3),分別設定不同的活套高度工作點參數,帶入公式(16)(17)得到關系式系數與活套角?茲的對應關系見表1。
現取?茲=24°,在大范圍內選擇PID參數,最終得到最佳的?茲PID參數。可得當P=85,I=34,D=0.02時,得到的仿真曲線如圖2所示。
在不改變PID參數的情況下,研究不同活套角?茲時,帶鋼張力的響應曲線。在模型中改變k,b系數,得到不同活套角度時,相同PID參數下的進行仿真,通過曲線可得出結論:常規的PID控制器,由于PID參數是固定的,在帶鋼張力出現波動時,即活套角度變化時,很難得到滿意的控制效果,故需要采用先進的智能控制策略。
2? AMEsim/matlab聯合仿真
考慮到AMEsim在控制運算方面的缺陷,本文采用聯合仿真模型設計,既發揮了AMEsim突出的流體機械的仿真效能,又能借助MATLAB/simulink強大的數值處理能力,取長補短,取得更好的控制仿真效果。
AMEsim/simulink聯合仿真是利用AMEsim對simulink的接口技術,在AMEsim中的界面菜單下創建接口模塊,與simulink中的S函數實現連接[4]。具體實現過程是在AMEsim中經過系統編譯、參數設置等生成供simulink使用的S函數,在simulink環境中,創建一個S函數模塊,將該函數名字命名為AMEsim模型名稱加“_”的形式,這樣就實現了帶鋼張力仿真平臺和Simulink算法模型的連接。AMEsim模型被當作一個普通的S函數,通過AMEsim/simulink Interface進行數據交換,從而實現聯合建模與仿真。在AMEsim中搭建液壓活套聯合仿真模型,在simulink中編寫S函數設計專家PID控制器模塊[5]。專家PID是指將專家系統理論和技術同普通PID控制理論技術相結合,模擬專家的控制智能,在未知情況下,提高系統的智能控制性能。聯合仿真模型模型如圖3所示。
運行仿真,得到仿真曲線如圖4所示,分析曲線可知,在?茲=24°時采用專家PID控制器對張力的控制效果與普通PID控制相比,在響應時間、控制精度、及超調量等方面都取得了很好的控制效果。當?茲改變時,也能得到很好的跟蹤和快速響應。
由此可知:專家PID控制相對于普通PID控制具有更好的動態和穩態性能,即采用專家PID控制具有更好的自適應性和魯棒性。
3? 結論
①液壓活套是個復雜的非線性系統,鑒于AMEsim在控制運算方面的缺陷,本文采用聯合仿真,在matlab中搭建控制模型,設計智能控制器,得到了較好的控制效果。②AMEsim/matlab聯合仿真具有模型與實際情況更加逼真,仿真計算速度和精度高,模型算法設計修改靈活,對于機電液壓系統的準確仿真及優化設計具有良好的指導意義。
參考文獻:
[1]付永領.祁曉野.AMEsim系統建模與仿真[M].北京航空航天大學出版社,2006.
[2]R Stücher,M Tuschhoff,S Brombach.Hydraulic Looper Simulations and Measurements for MAGIC Benchmark Tests [C]// IAR-ICD/ FATIS/MAGIC? Workshop, 2003. Germany, 2003:107-112.
[3]童朝南,武延坤,宗勝悅,王浩然.熱連軋中液壓活套系統數學模型的研究系統[J].仿真學報,2008,20(6).
[4]李謹,鄧衛華.AMEsim與MATLAB/simulink聯合仿真技術及應用[J].情報指揮控制系統與仿真技術,2004,10(5):61-64.
[5]劉金瑤.先進PID控制MATLAB仿真[M].電子工業出版社,2006.
