基于ROS的服務機器人關鍵技術研究與實現
2019-12-19 02:07:13孫弋張松
軟件
2019年11期
孫弋 張松
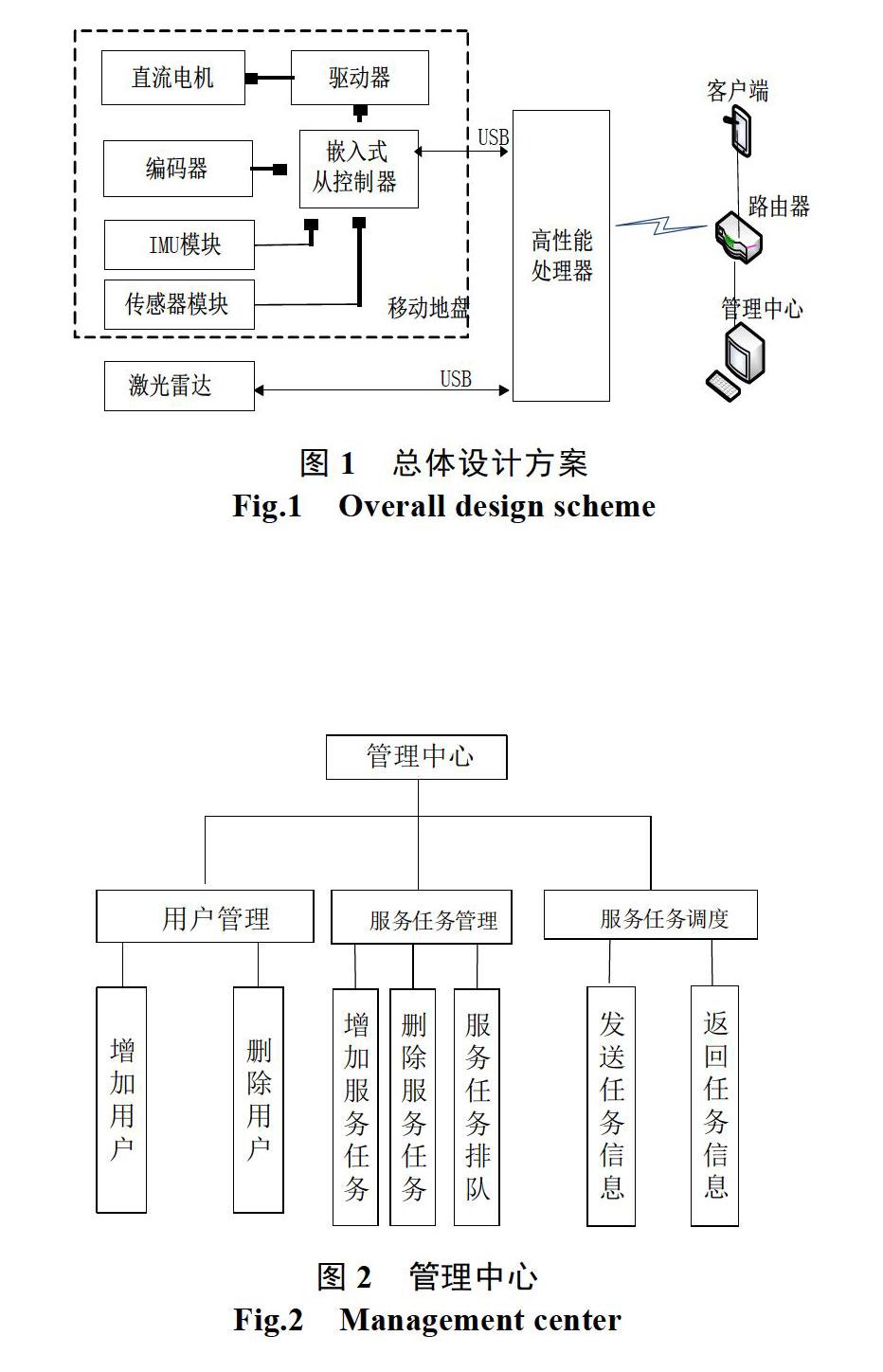
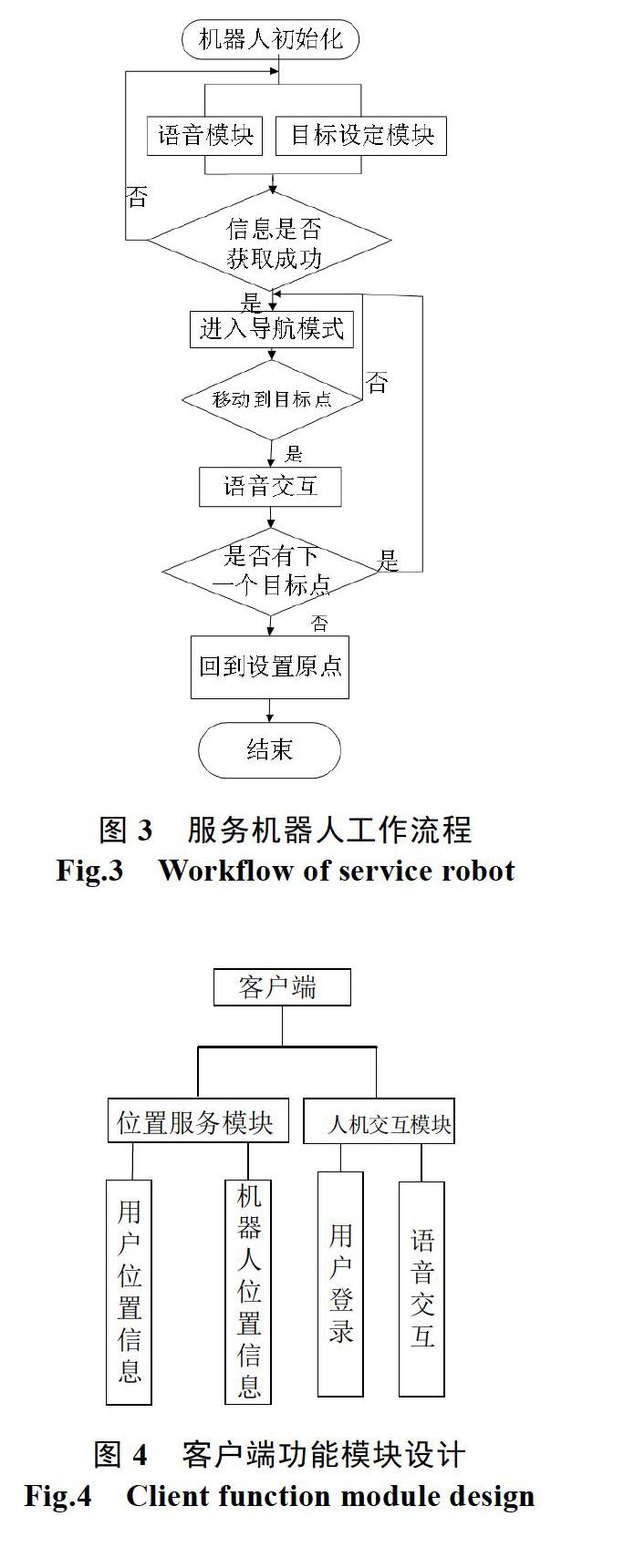
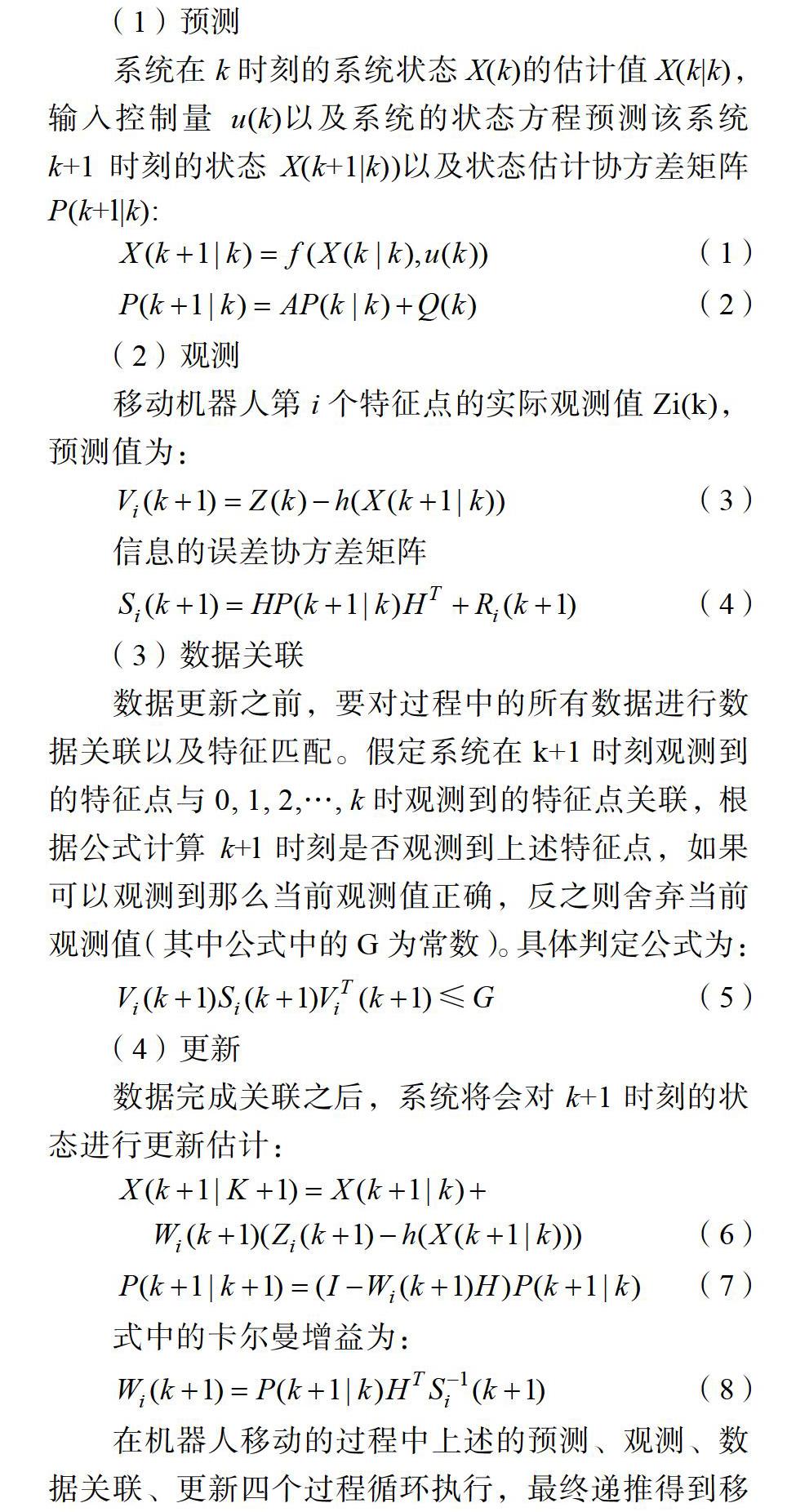
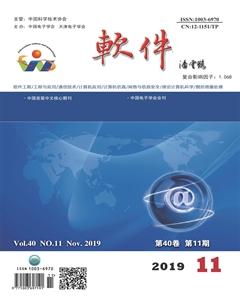
摘? 要: 針對服務機器人服務業務的無監督實現問題,設計并實現了一種基于ROS(機器人操作系統)的智能服務機器人系統。該系統包括管理中心、機器人本體和客戶端,采用基于ROS系統的node節點分布式架構。管理中心由服務器組成,管理中心是任務管理與執行調度的核心組成部分,負責對系統內各種資源進行管理和調度,機器人本體使用高性能核心處理器搭載環境傳感器,通過基于EKF(擴展卡爾曼濾波)的SLAM算法解決移動機器人導航問題,客戶端與機器人本體的信息交互采用基于rosbridge的節點通信技術。機器人系統通過語音交互技術實現了語音自主導航。本設計在實驗室環境采用Turtlebot機器人進行實際測試,測試結果表明本方案可以初步實現機器人基礎服務場景中的自主定位與導航及語音控制功能。
關鍵詞: ROS;自主導航;服務機器人;人機交互
【Abstract】: Aiming at the unsupervised implementation of service robot service business, an intelligent service robot system based on ROS (Robot Operating System) is designed and implemented. The system includes management center, robot ontology and client, and adopts node node distributed architecture based on ROS system. Robot ontology uses high-performance core processor to carry environmental sensors. SLAM algorithm based on EKF (Extended Kalman Filter) is used to solve the navigation problem of mobile robots. Rosbridge-based node communication technology is used for information interaction between client and robot ontology. Robot system realizes speech autonomous navigation through voice interaction technology. The design uses Turtlebot robot to test in the laboratory environment. The test results show that the scheme can initially realize autonomous positioning, navigation and voice control functions in the basic service scenario of the robot.
【Key words】: ROS; Autonomous navigation; Service robot; Human-computer interaction
0? 引言
隨著人工智能和物聯網技術的發展,服務機器人在服務行業開始得到廣泛應用,服務機器人成為節約人力和經濟成本,解決老齡人口護理等方面的一種可行方案[1],服務機器人在特定場景下的應用成為當前機器人應用研究領域的難點和重點,美國卡耐基梅隆大學與Intel公司共同研制出助老助殘的服務機器人,可以完成擺放桌椅、端茶端菜等基本的日常生活服務[2],文獻[3]研制的Care-O-bot4機器人為應對多樣性的環境而采用了模塊化設計,通過自身的攜帶傳感器識別特定人員的手勢或者語音來完成相應的指定任務。……
登錄APP查看全文