無人艇防空機動模型及仿真分析
2019-12-10 05:54:36楊羅章胡生亮羅亞松
指揮控制與仿真 2019年6期
楊羅章,胡生亮,羅亞松
(海軍工程大學兵器工程學院,湖北 武漢 430033)
水面無人艇具有體積小,環境適應性強,隱蔽性好,機動靈活,無人員傷亡等優點,成為現代無人作戰系統中一個重要分支。其使命任務也不僅局限于巡邏警戒、監視偵查等任務,在水面無人艇上搭載武器系統,配合大型艦艇執行反艦、防空反導、反潛、對岸火力支援等硬殺傷任務,拓展豐富海上作戰樣式,也成為其重要發展趨勢[1-3]。其中,無人艇搭載防空導彈前出水面艦艇攔截反艦導彈,增加水面艦艇的有效反導遠界,是提高大型艦艇抗飽和攻擊能力、提高攔截和抗擊反艦導彈成功概率的有效方式。與有人艦艇執行防空反導任務相比,無人艇防空反導應最大限度減少人在回路的控制,一方面可以提高其執行作戰任務的實效性,另一方面可以滿足其智能化和自動化的控制要求。因此,根據無人艇典型結構和防空反導需求構建機動模型,使其全自動執行作戰流程是無人艇防空反導的一項重要研究內容。本文以搭載防空導彈的水面無人艇為研究對象,以無人艇執行防空反導任務時攔截概率最大化為目標,對無人艇防空機動進行研究。
1 無人艇機動
無人艇機動,即無人艇為達成戰術目的,相對于目標所進行的變換位置或保持位置的運動,目的是搶占和保持有利陣位,充分發揮己方武器的威力,阻礙敵方武器的使用或降低其效果。無人艇的機動樣式,主要包括定向定速機動、定舷角運動、混合機動和曲折機動[4-5]。
1)定向定速機動,亦稱直航向機動,機動過程中航向航速不變,是最基本的機動樣式。雙方定向定速機動時,要采取最佳的航向、航速和相應的機動時間,以使陣位要素的變化對己方有利。
2)定舷角機動,是在機動過程中或一段時間內,保持本艇舷角不變的機動。
3)混合機動,是一方做定向定速機動,另一方做定舷角機動。
4)曲折機動,亦稱“之”字運動,是采取有規律或按預定方案無規律變向(有時也變速)的機動,對于阻礙、規避敵方使用炸彈的攻擊和降低敵方艦炮射擊效果有良好作用。
無人艇防空作戰時,由于無人艇速度相對于空中來襲導彈目標的速度很慢,基本可以忽略不計,因此,無人艇的防空運動可看作是混合機動,即無人艇做轉向機動,目標做定向定速運動或曲線運動。
2 無人艇防空導彈跟蹤區及射界分析
無人艇上使用旋轉發射架的防空導彈,安裝在艇艏時,其物理模型如圖1所示。假設無人艇防空導彈的最大射程為R,高度值為h的點M為導彈最遠射擊距離上一點。以無人艇為原點,建立如圖2坐標系,Y軸為無人艇的初始航向Cw方向,X軸在水平面內垂直于Y軸,指向無人艇右舷,H軸垂直水平面向上。

圖1 無人艇物理模型圖
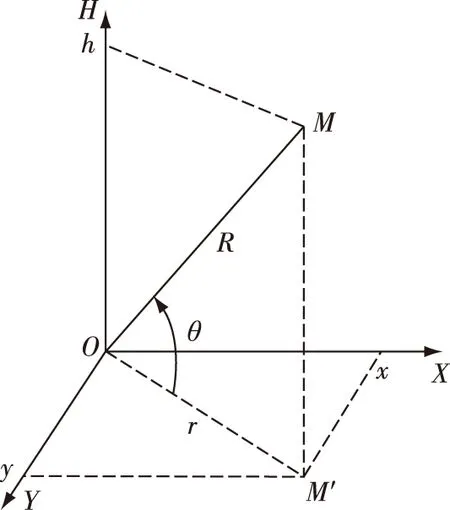
圖2 無人艇防空導彈跟蹤區及射界坐標系
無人艇的結構特點制約著其防空導彈的可跟蹤俯仰角和舷角,從而使防空導彈存在部分跟蹤死區[6]。防空導彈的最小可跟蹤俯仰角與可跟蹤舷角關系如圖3所示。
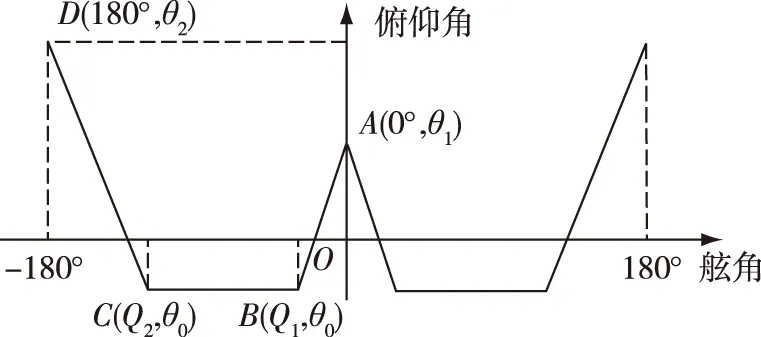
圖3 最小可跟蹤俯仰角與可跟蹤舷角關系圖
在導彈發射時,為保證無人艇自身的安全,取發射安全角為ΔQ,為滿足防空導彈的導引頭對目標捕獲跟蹤,又滿足導彈的可發射舷角[7-8],則無人艇的最小發射舷角Qmin、最大發射舷角Qmax、最大水平射距r與目標高度h的關系為
(1)
3 無人艇防空作戰機動模型
3.1 無人艇機動最優解分析
若無人艇位于點O,航向為Cw=0;目標位于T點,方位為Cm,斜距為Rm,高度為h,目標相對于無人艇的速度為Vm,敵舷角Q=Cm-Cw,假設目標做勻速直線運動,通過目標與目標相對速度方向一致的射線為目標航路。以無人艇為原點,建立如圖4所示水平坐標系,Y軸為無人艇的初始航向Cw方向,X軸在水平面內垂直于Y軸,指向無人艇右舷。

圖4 坐標系示意圖

(2)

圖5 可靠射擊區示意圖

當目標航路捷徑d>0時,由于d和導彈的最遠水平射距r是已知的,則

(3)
因此,角度δ和距離L1的值變為已知,由于L=L1+L2,則當L2值取最大時,L也得到最大值。而L2=d×tanγ,因此,求解L的最大長度問題可轉化為求解角度γ的最大值問題,而
γ=Q2-Q1-δ-dQ,dQ≥0
(4)
圖6 無人艇機動目標示意圖
3.2 無人艇機動方案
無人艇的機動方案為:轉向機動,保持對目標的射擊點P的舷角在導彈射界范圍內,且可靠射擊區長度最大。定義轉向角ψ以無人艇航向為基準,順時針方向為正,即ψ>0時,無人艇向右轉向;ψ<0時,無人艇向左轉向,其取值范圍為[-π,π]。
ψ的值確定與兩個條件有關:一是射擊點P的舷角大小;二是無人艇相對于目標的方位φ。
ψ的值分為以下幾種情況:
1)φ=0時,即目標航路捷徑d=0時,轉向角ψ為

(5)

(6)


(7)
4 機動模型仿真驗證
假設無人艇初始航向Cw=0,以無人艇為原點O建立水平坐標系,Y軸方向為無人艇初始航向,即正北方向;X軸在水平面內垂直于Y軸,指向無人艇右舷。
T=0時刻,發現敵目標位于點Μ(20 km,15 km,0.5 km),水平相對速度Vm=50 m/s,初速相對速度方向α=-135°(以正北,即Y軸為基準,順時針為正,逆時針為負)。
假設防空導彈的最遠射擊斜距R=4 km,無人艇的平均轉向角速度ω=0.05 rad/s,艇艏部分形成遮擋的最大仰角θ1=15°,水平舷角Q1=15°,上層建筑遮擋的最大仰角θ2=60°,水平舷角Q2=145°。取最低發射俯仰角θ0=0°,發射安全角ΔQ=10°,由目標高度h=0.5 km,根據式(1)可得無人艇防空導彈的射界范圍為
(8)
假設目標做勻速曲線運動,目標航向以0.005 rad/s的修正速率向無人艇機動,則其運動方程為
(9)
目標運動軌跡仿真如圖7所示。
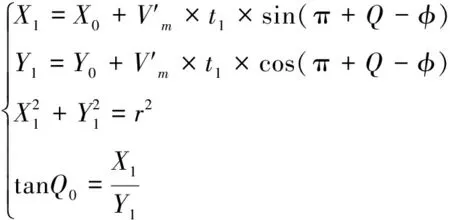
可由式(2)得T時刻防空導彈射擊點P的坐標(Xp,Yp)為

(10)
則射擊點P的方位角Qp為
(11)
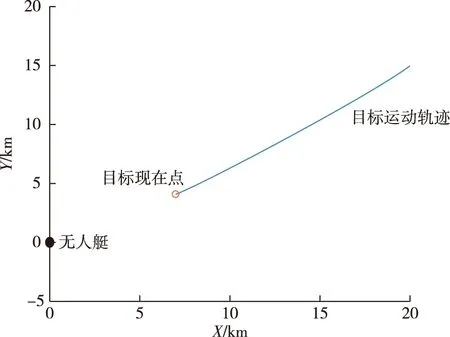
圖7 目標運動軌跡圖
則目標方位,射擊點P的方位及無人艇航向隨時間變化關系如圖8所示,由圖8可知:

圖8 各角度變化曲線
1)無人艇初始航向為0,做曲線運動;
2)在A點之前,目標處于防空導彈射界之外,求解的射擊點P(即目標航路延長線與導彈射距的交點)的方位逐漸減小;
4)A點以后,無人艇轉向機動始終保持射擊點P相對于無人艇舷角不變,即在曲線中間段,保持射擊點P的方位與無人艇航向之差恒定,為最佳射擊舷角Qmin;
5)目標進入導彈的射界后,即對應B點以后,導彈以目標現在點為射擊點。此時,導彈具備發射條件。
5 結束語
水面無人艇搭載防空導彈執行防空反導任務時,通過無人艇防空導彈跟蹤區及射界計算,可明確無人艇機動的約束條件。以攔截導彈概率最大化目標,可求解出不同航路捷徑條件下無人艇機動的最優解。針對不同戰場態勢,即可確定無人艇機動方案。仿真結果表明,所提出的無人艇防空機動模型及機動方案合理有效,為水面無人艇執行防空反導任務實際運用提供了有價值的參考。