基于STM32的車輛智能避障控制系統設計
2019-12-02 02:31:23張微楊博云王韻琪
科技視界 2019年32期
張微 楊博云 王韻琪
【摘 要】本系統以STM32F103ZET6單片機為核心,輔以圖像識別模塊、wifi模塊、紅外傳感模塊、數據采集模塊等組成。設計一個由主站控制從站的車輛智能避障控制系統。利用移動終端與上位機實現數據的傳輸與控制,保證系統的穩定運行。
【關鍵字】STM32;智能小車;避障系統
中圖分類號: TP23文獻標識碼: A 文章編號: 2095-2457(2019)32-0024-002
DOI:10.19694/j.cnki.issn2095-2457.2019.32.010
Design of Intelligent Vehicle Obstacle Avoidance System Based on STM32
ZHANG Wei YANG Bo-yun WANG Yun-qi
(College of Electornic & Information Engineering
【Abstract】This system based on STM32F103ZET6 MCU, is composed of image recognition module、wifi module、infrared sensor module、data acquisition module and so on. It realizes an intelligent vehicle obstacle avoidance control systen whose slave station is controlled by master station.lt use mobile terminal and computer to realize transmission and control, ensure the stable operation of system.
【Key words】STM32; Intelligent Vehicle; Obstacle Avoidance System
0 引言
車輛智能避障控制系統是一種集規劃決策、通信導航、自動行駛、環境感知等功能于一體的綜合系統,集中運用到機械、電氣、傳感器技術、自動控制、汽車電子、計算機、模式識別等多個學科,是典型的高新技術綜合體,能起到縮短作業時間、降低能源和材料的消耗、改善操作條件、提高產品質量以及改善經營管理、加強企業管理等多方面的作用,具有重要的軍用及民用價值。
迄今,關于車輛智能避障系統的研究還不多見,本文用STM32F103ZET6單片機作為主控芯片,采用模塊化的設計方案,設計一套車輛智能避障控制系統,經測試可應用于智能交通和包裹分揀等場合[1]。
1 方案設計
STM32F103系列單片機具有強大、高效的指令系統、高性能的模擬技術及豐富的外圍模塊。方便高效的開發環境使操作更加簡便,低功耗是其他類單片機難以比擬的。
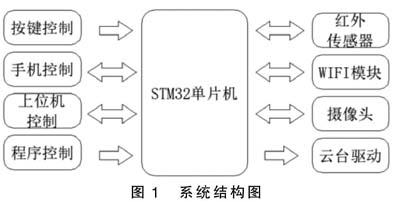
以STM32F103為核心,設計一套車輛智能避障系統。如圖1所示,該系統集避障模塊、云臺模塊、紅外傳感模塊、循跡模塊、攝像頭模塊、電機驅動等硬件裝置于一體,利用軟件算法處理信號驅動小車運動,同時實現實時畫面顯示、循跡、避障功能[2]。
圖1 系統結構圖
2 功能實現
2.1 循跡功能
單片機通過判斷三路循跡模塊的狀態來控制小車運動。當三路都檢測到信號時,小車直線運動;當左路無信號時,小車左轉;當右路無信號時,小車右轉。
2.2 避障功能
單片機獲取兩個紅外避障模塊的狀態,當左路檢測到信號時,小車后退并右轉;當右路檢測到信號時,小車后退并左轉;當兩邊都檢測到時,小車后退并右轉;當無信號檢測到時,小車直線行駛。
2.3 上位機與移動終端控制功能
單片機整合舵機模塊、攝像頭模塊、電機模塊、WIFI模塊的功能,通過移動終端APP與上位機,實現對小車的控制,小車攝像頭畫面通過WIFI反饋給移動終端與上位機。
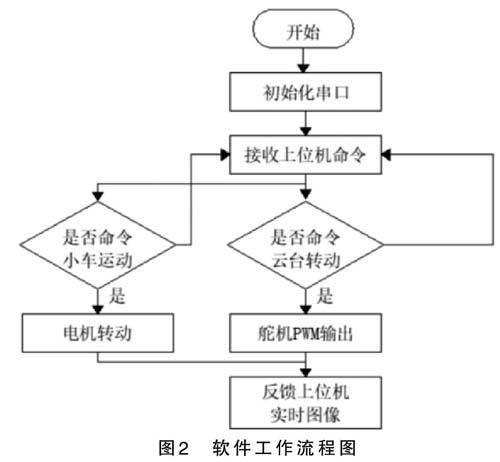
圖2 軟件工作流程圖
2.4 紅外控制功能
當單片機接收到紅外信號時,紅外接收頭解碼輸出信號直接提供給單片機,單片機根據信號的類型實現小車不同的功能[3]。
3 軟件系統設計
軟件部分結構圖如圖2,首先進行程序初始化,判斷是否收到小車運行、云臺轉動的命令。如果檢測到低電平,則電機驅動模塊發出運轉信號,舵機驅動模塊發出PWM信號,同時反饋檢測到的圖像信號,如果沒有接收到命令,則繼續等待。
4 結束語
本文主要講述了基于STM32單片機,利用WIFI模塊和低功耗圖像處理模塊搭建智能化的避障系統,其驅動原件由度云臺和抗干擾TT馬達。在實驗室環境下該系統可以實現實時圖像傳輸、上位機與移動終端WIFI控制、循跡避障等功能,系統穩態誤差較小,響應迅速、動態性能快,抗干擾性和穩定性強。
【參考文獻】
[1]衛靜婷,陳利偉.基于STM32的語音控制和自動避障智能小車的設計[J].電子測試,2018.08.
[2]馬德希.基于循跡避障控制系統的智能小車遙控設計[J].計算機產品與流通,2019.09.
[3]王鑫鑫.定時測距避障智能小車[J].計算機產品與流通, 2019.09.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
