
智能無人車縱向運動控制方法研究
2019-11-30 03:47:06高琳琳唐風敏夏海鵬
汽車電器 2019年11期
高琳琳, 戎 輝, 唐風敏, 郭 篷,何 佳, 夏海鵬
(1.天津大學,天津 300072;2.中汽研 (天津)汽車工程研究院有限公司,天津 300300;3.中國汽車技術研究中心有限公司,天津 300300)
智能無人車是智能交通系統的重要組成部分,也是目前整個汽車行業的研發焦點。運動控制是自動駕駛技術的3大核心問題之一,其可以進一步劃分為縱向運動控制與橫向運動控制[1]。縱向運動控制是無人車運動控制的基礎,其主要控制目標是對期望車速的跟蹤,實現汽車加速、制動、車速保持等功能。
縱向運動控制方法是縱向運動控制的核心,其不僅決定了無人車對期望車速的跟蹤精度,也決定了整車的舒適性,縱向穩定性。針對智能無人車縱向運動控制方法的研究,近年來已取得了不少研究成果。就現有研究成果而言,PID控制在縱向運動控制領域有著相當廣泛的應用。如,卡梅隆大學智能車團隊的Boss智能車即設計了兩個PID控制器分別對加速、制動執行機構進行控制,完成對期望車速的跟蹤[2]。與Boss智能車相同,北京工業大學的BJUT-IV[3]、南京理工大學的“巡洋艦”[4]以及中國科學院的“北極星”[5]也都采用了相同的控制策略及PID控制器實現對期望車速的跟蹤。
基于此,本文綜合考慮智能無人車驅動、制動執行系統特點,分別設計了驅動、制動控制器以及兩者間的切換邏輯,實現對期望車速跟蹤的同時,保證驅動、制動系統的平穩過渡。最后,通過Carsim/Simulink聯合仿真驗證設計的縱向運動控制系統的有效性。
1 縱向運動控制系統結構
考慮到一般情況下智能無人車采用集中式驅動系統 (發動機或電機),其控制量為節氣門開度 (或電機驅動信號);制動系統一般采用液壓制動,其控制量為制動踏板力或制動總缸壓力。為此,文中設計的縱向運動控制系統結構如圖1所示。該結構包括驅動控制器、制動控制器以及兩者間的切換邏輯3個部分組成。驅動控制器選擇單神經元PSD控制器,以此提高控制精度;制動控制器選擇增量式PID控制器,并在輸出端添加一個慣性環節,以此保證系統輸出控制量的平穩過渡,防止出現較大沖擊。切換邏輯以期望車速與實際車速間的差值作為判斷依據,切換驅動、制動控制器的工作,保證車輛正常行駛。

圖1 縱向控制系統結構
2 縱向運動控制系統設計
2.1 驅動控制器設計
針對智能無人車的驅動控制問題,文中設計了一個單神經元PSD驅動控制器。單神經元PSD控制方法是一種以PID控制為基礎,可實現控制參數自適應的智能控制方法。設計的單神經元PSD驅動控制器以期望車速Vdes與實際車速Vx間的差值ev作為控制器輸入,以節氣門開度ud作為控制器輸出,其具體控制律可以描述為:

式中:g1、g2、g3——單神經元PSD控制器的權值;K——控制器增益系數。
單神經元PSD控制最大的特點是其可以依據當前時刻控制誤差進行權值的自學習、自調整,以此實現整個控制器參數的自適應,其權值調整學習算法可以描述為:
式中:dI、dP、dD——權值的學習速率;z(k)——教師信號,且有z(k)=ev(k)。
2.2 制動控制器設計
對于制動系統而言,其控制量應該盡量避免較大沖擊,由于單神經元PSD控制器較為依賴權值的調整,因此,文中制動控制器選用增量式PID控制器。該控制器同樣以期望車速Vdes與實際車速Vx間的差值ev作為控制器輸入,以制動踏板力ub作為控制器輸出,其控制律描述如下:
式中:kb_p——制動控制比例系數;kb_i——制動控制積分系數;kb_d——制動控制微分系數。
對于制動控制,為保證系統平穩,降低超調進而避免頻繁啟動,因此在系統中加入一個慣性環節,即制動系統輸出改進為:

2.3 切換邏輯
汽車在實際行駛過程中,驅動、制動系統不會同時工作,也不會頻繁切換,為此,需在驅動、制動控制系統的基礎上設計一定的切換邏輯,保證兩個系統的順利工作。目前,針對切換邏輯部分,文中采用一種基于車速誤差閾值的切換邏輯,如圖2所示,其具體原理如下。
1)判斷車速誤差ev與設定的切換閾值ev_th間的大小關系。
2)若ev<ev_th,則關閉驅動系統,開啟制動系統。
3)若ev_th≤ev≤0,則驅動系統,制動系統同時關閉。
4)若ev>0,則開啟驅動系統,關閉制動系統。

圖2 切換邏輯原理
3 仿真試驗分析
為驗證分析設計的縱向運動控制系統,文中采用Carsim/Simulink聯合仿真的形式對其進行測試。具體測試工況為:智能無人車以0km/h起步,在10s內勻加速至20km/h(加速度約0.55m/s2),保持均速5s后,在15s內勻加速至80km/h (加速度約1.1m/s2),保持均速5s后,在25s內減速至停車 (減速度約0.88m/s2)。
測試結果如圖3所示。其中,圖3a為期望車速與實際車速對比曲線,圖3b為期望車速的跟蹤誤差,圖3c為節氣門開度變化曲線,圖3d為制動踏板力變化曲線。通過圖3a和圖3b可以看出,無論是驅動控制器還是制動控制器,都能較好地跟蹤期望車速,并將車速誤差保持在較小范圍 (最大誤差約1.18km/h);通過圖3c和圖3d可以看出,驅動系統與制動系統并未出現頻繁切換的問題,只在車速處于0~6km/h范圍出現兩次切換,這是由于車輛的怠速特性所致。
4 結論
本文在綜合考慮了一般智能無人車驅動、制動執行系統特點的基礎上,采用單神經元PSD控制策略設計了驅動控制器,采用增量式PID控制策略設計了制動控制器,同時設計了兩者的切換邏輯,保證驅動、制動系統的正常工作。最后,文中通過Carsim/Simulink聯合仿真對設計的縱向運動控制系統進行測試,結果表明,設計的縱向運動控制系統能夠有效跟蹤期望車速,且不會出現驅、制動系統的頻繁切換。
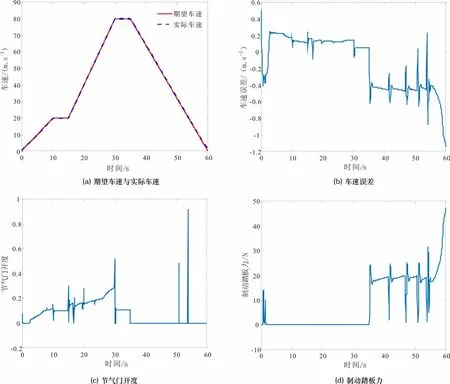
圖3 縱向運動控制系統測試結果
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
