基于三軸加速度傳感器的機械故障監測系統的設計與研究*
2019-11-28 03:10:14張子毅駱東松
艦船電子工程 2019年11期
張子毅 裴 陽 駱東松
(1.甘肅工大舞臺技術工程有限公司 蘭州 730050)(2.蘭州理工大學 蘭州 730050)
1 引言
工業生產中機械故障時有發生,人們采用監測機械振動信號的方式來預測機械故障。傳統的機械故障檢測系統采用單軸傳感器作為信號采集單元[1],這樣的采集單元只能檢測到某一位置的單一方向振動信號,對于復雜機械的檢測系統來說單一方向的振動信號是遠遠不夠的[2]。為解決這一問題,本文采用先進的三軸加速度傳感器ADXL372作為機械故障監測系統的信號采集器件;完整的監測過程要求系統具有數據分析能力,文獻[3]基于WinCE操作系統設計了一種振動分析儀,本文將精簡的uC/OS-II系統引入到該檢測系統中,并在系統中運行針對三軸數據的處理算法,文獻[4]中利用DFT變換分析單軸信號,文獻[5]利用EMD方法分析單軸信號,由以上兩種方法可知,振動監測系統的數據分析算法大多以單軸算法為主,并由傳統的時頻分析方法逐漸向較復雜的頻譜分解方法過渡,文獻[6]以三維頻譜的方式呈現機械的振動信號,引出了三軸數據分析的例子。基于以上分析,本文將提出基于三軸加速度傳感器的三軸數據處理算法MEMD方法,該算法可以有效地處理振動信號,并從中篩選出故障信息。
2 系統硬件基礎
本章將著重介紹系統的硬件部分的兩個主要器件:三軸加速度傳感器ADXL273和STM32F103C8T6單片機。結合實際需求,通過分析器件的性能,得出器件選型的結果。最后就這些器件設計監測系統的硬件結構圖并繪制電路圖。
2.1 ADXL273與STM 32F103C8T6介紹
ADI公司于2017年推出三軸加速度傳感器ADXL273,采用先進的MEMS技術,該技術將機械結構與電子電路有機的結合在一起,做到了最大程度的集成和精簡,其結構如圖1所示。

圖1 ADXL內部結構
ADXL372最小測量精度為±4g,測量范圍為±200g,帶寬為3.2kHz,可見相比于其他同類產品,ADXL372有著優越的性能,非常適合應用在振動監測系統之中。另外,其輸出類型是數字量,并配有SPI通信接口,可以與單片機直接通信;一般情況下,機械振動的頻率范圍在十幾赫茲到幾十千赫茲不等,有時甚至會在兩千到三千赫茲之間,許多振動傳感器的采樣帶寬都不符合這一要求,就會導致采集的數據失真,嚴重影響分析結果;ADXL273的工作模式有休眠模式(工作電流為100μA)和連續采樣模式(工作電流為1mA)兩種,并且具有喚醒功能,當振動幅值在一定閾值范圍內,傳感器將進入休眠模式,超過閾值,傳感器將被喚醒,進入連續采樣模式。因此,ADXL372滿足低功耗的需求。
STM32F103C8T6是一款基于ARM Cortex-M內核的32位的微控制器,精簡的48腳分裝,具備兩組SPI通信端口,通信速率為72MHz。STM32F103C8T6作為硬件設備的MCU,可以通過SPI1接口將數據從ADXL372讀取出來,并通過SPI2將數據存儲到MR25H40磁阻存儲器中,該磁阻存儲器具備寫保護功能,可防止數據意外丟失[2]。
2.2 系統硬件構成及電路設計
通過以上介紹得出系統的硬件結構如圖2所示,其他外部硬件包括液晶顯示屏、按鍵等;單片機的預留的總線端口提供與計算機通信的通信功能,數據就可以在計算機中存儲,進行更進一步的分析。

圖2 系統硬件構成
3 嵌入式系統及程序設計
本章將介紹系統的軟件設計,包括uC/OS-II操作系統的剪裁與移植以及系統內程序的架構與思路。
3.1 uC/OS-II操作系統
uC/OS-II操作系統作為一種高效的嵌入式操作系統,具有可移植性好、穩定性高和可靈活剪裁等特點,其軟硬件結構如圖3所示。
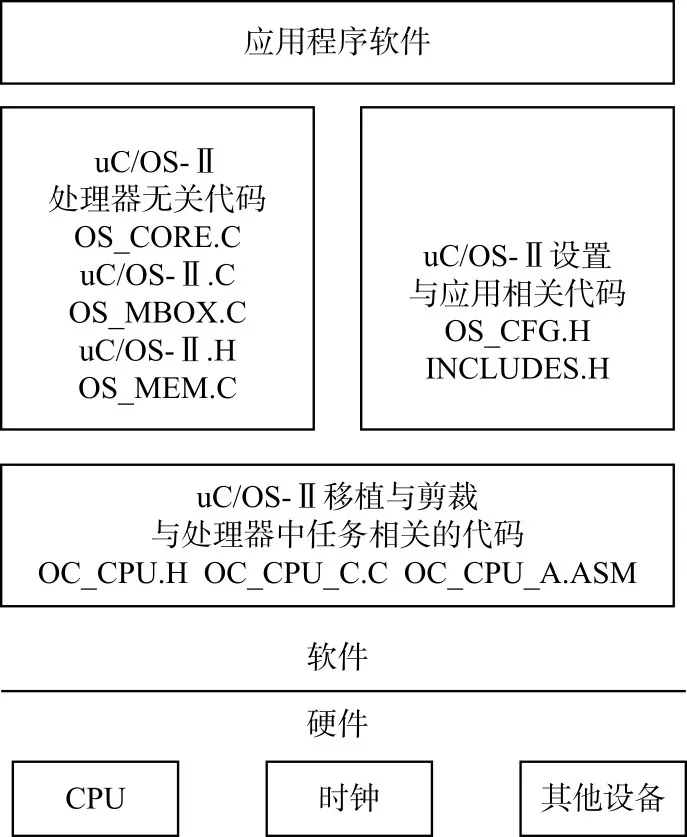
圖3 嵌入式系統構成
根據前文介紹,本系統選擇KeilμVision4作為軟件開發環境,在此軟件上,移植方法包括以下步驟。
首先,在KeilμVision4上新建一個工程,并添加啟動代碼。其次,在Micrium官網下載μC/OS-II的軟件工程包,將這些工程包中的代碼選擇性的添加到工程文件夾下,這也是系統可剪裁的體現。最后,通過修改os_cpu.h、os_cpu_a.asm、os_cpu_c.c著三個文件夾下的內容,就可將μC/OS-II移植到嵌入式處理器STM32F103C8T6中。
3.2 程序設計
操作系統移植成功之后,將在此基礎上編寫代碼,控制外設相互配合協調工作。其軟件流程如圖4所示。

圖4 軟件流程圖
這里著重介紹對ADXL372的初始化,初始化程序分為以下幾步:
第一步,在器件的ID寄存器中讀取,判斷SPI初始化是否成功,其寄存器地址為0xAD。
第二步,設置采集頻率,其寄存器地址為0x3E的最后三位,帶寬從200Hz~3200Hz可選。
第三步,設置ADXL372為自動睡眠模式,該模式下傳感器在沒有監測到振動時自動進入睡眠模式;振動超過閾值,則進入工作模式,寄存器地址是0x3E的第6位。
設置完以上寄存器,DAXL372開始正常工作。讀取ADXL372的數據程序如下所示
xAccDataH = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_XDATA_H_REG)<<4;
yAccDataH = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_YDATA_H_REG)<<4;
zAccDataH = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_ZDATA_H_REG)<<4;
xAccDataL = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_XDATA_L_REG)<<4;
yAccDataL = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_YDATA_L_REG)<<4;
zAccDataL = Stratos_EM.adxl372zdevice.read(Stratos_EM.ADXL372Z_ZDATA_L_REG)<<4;
4 振動分析算法
一個完整的振動分析系統離不開算法的支持,本章將在介紹傳統時頻算法的基礎上,以EMD方法為基本方法,研究專門針對三軸數據的MEMD方法。
4.1 時頻分析算法
如今的振動分析儀大多都配有簡單的時頻分析算法,常見的機械故障信號都可以用時頻算法從中提取故障信號,如文獻[7]中利用FFT變換以及IIP濾波器對振動信號進行分析,其中快速傅里葉變化(FFT)利用如式(1)所示的離散傅里葉變化(DFT)中的WNnk的復共軛對稱性和WNnk對n和k的周期性進行簡化,如式(2)、(3)所示。

其他的時頻算法如幅值譜、功率譜、對數譜和倒譜都以譜布圖中的特征判斷故障原因[8],以上時頻算法在數據處理上雖然有著操作簡單,易于執行等優點,但對于夾雜有諸多非線性時變成分的振動信號總有著分析結果不全面等缺點。
4.2 EMD方法
經驗模態分解分解方法(Empirical Mode Decomposition,EMD)于1998年由黃鍔提出,是一種非常適合處理非線性非平穩信號的方法。該方法依照數據自身的時間尺度特征來分解信號,故具有自適應性。EMD方法的分解過程主要包括以下三個方面:首先,找出原始信號X(t)的極大值、極小值并通過三次樣條插值函數擬合出信號的上下包絡線。然后,根據上下包絡線求出均值函數,記為m1。最后,將均值函數從原始數據中減去,得到新的數據序列h1如式(4)所示:

如果新的數據序列h1還存在負的局部極大值和正的局部極小值,說明這還不是一個本征模函數,還需要繼續迭代篩選,直至出現滿足條件的本征模函數(Intrinsic Mode Function,IMF),如式(5)所示:

此時記h1k(t)=c1(t),稱c1(t)為原始信號X(t)的第一階IMF。
通過以上工作得出了第一階IMF,然后將其從原始信號中分離出來,得到下一個待篩選信號即:

對r1(t)重復上述工作,直至信號被分解成多個IMF分量和的形式[9],即:

4.3 MEMD方法
根據上一節介紹,EMD方法將原始數據分解成若干個IMF分量和的形式,每個IMF分量處于不同的頻帶。但是對于三軸傳感器傳回的數據,每軸的數據都具有不同的信號成分,在數據分析是會產生模態對其等問題[10],這就需要某種方法可以解決這一問題,達到多軸數據有機融合的目的。
MEMD方法將多維包絡的概念引入進來,多維包絡將多元信號延空間中不同方向投影,得出了投影信號之后就可以使用算數平均的方法來擬合局部均值函數。以上過程中的空間方向向量決定了局部均值函數的精確程度,方向向量在空間球面中分布越均勻,精確程度越高;反之,精確程度越低。因此,如何確定投影的方向向量就成了MEMD分解的首要問題。
文獻[11]對比了均勻角度采樣法和基于準蒙特卡洛方法的低差異序列采樣法兩種方法確定球面上的點集,并得出的出后者優于前者的結論,本文也將利用基于準蒙特卡洛方法的低差異序列采樣法確定單位球面上均勻分布的點集。
通過以上討論,現陳述針對三維信號的MEMD算法思路如下:
第一步,利用基于準蒙特卡洛方法的低差異序列采樣法得到一組分布均勻的方向向量X。
第二步,將信號組 v(t)延第 k個方向向量Xk投影,得到投影函數p(kt),其中k=1,2,3,…,l,l表示方向向量的總數。
第三步,找到投影函數的極大值、極小值所對應的時刻tik,其中i=1,2,3,…,n,n表示極值點的數量。
第五步,將以上步驟所得到的對應于l個方向向量的所有多元包絡函數求取近似均值函數:

第六步,提取出固有模態函數h(t)=V(t)-M(t),并執行類似EMD方法中的篩選過程,直至找到符合條件的多元IMF分量。
最后重復上述步驟,將原始三維信號分解完備,可表示為

以上是MEMD分解過程,該方法不僅繼承了傳統EMD的自適應性,而且可以實現三通道的信號分解,非常適合與三軸加速度傳感器配合處理數據。
5 結語
本文首先在介紹振動監測系統軟硬件結構的基礎上對比分析了加速傳感器、主控MCU的選型以及嵌入式操作系統的選型和剪裁,其次設計了以三軸加速度傳感器ADXL372為采集器件,以STM32F103C8T6為控制核心的系統電路圖,并編寫嵌入式軟件。最后為了更好地分析三軸數據,對比研究了以EMD方法為基礎的三軸數據算法MEMD,此算法可將三軸數據有機的融合,有助于數據的綜合診斷和分析。
隨著計算機科學的發展與完善,如今的振動監測系統將會朝著高精度、大數據的方向發展,這就要求振動分析儀可以與PC數據通信,PC的數據處理就可以基于云平臺等大數據分析手段實現數據共享和遠程診斷[12]。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
