主動懸架多時滯補償的一般方法
2019-11-27 05:23:18張進秋劉義樂
裝甲兵工程學院學報 2019年3期
張進秋, 姚 軍, 劉義樂
(陸軍裝甲兵學院車輛工程系, 北京 100072)
與1/4懸架模型和1/2懸架模型相比,整車懸架模型與真實車輛懸架系統更為接近,其中7自由度懸架模型為最簡單的整車懸架模型[1]。7自由度懸架系統包括車體垂直振動、俯仰振動和側傾振動,基本考慮了真實車輛的運動狀態。為了盡可能保持車輛的穩定性,受控懸架系統得到廣泛研究[2-4],其中:BREZAS等[5]利用LQG控制器對整車進行控制;MORADI等[6]設計了一種自適應PID滑模容錯控制,并與傳統滑模進行了對比,結果表明此控制器控制效果很好;SHIN等[7]利用H∞控制器對火車進行了整車控制。在車輛姿態控制方面,PARIDA等[8]通過引入伺服作動器,用于改變車輛左右的高度,從而保持車輛的穩定性;ANUBI等[9]通過改變懸架連接點的位置實現變剛度,結果證明這一方法相比傳統控制方法能降低50%側翻幾率;HU等[10]和KANCHWALA等[11]將主動懸架和主動轉向系統結合起來以保持車輛的穩定性。
整車懸架控制目標增加,同時控制約束也更少,體現在可以進行預測控制,即利用前輪或安裝在車體前面的傳感器采集路面信息,對后懸架進行預測控制。GOHRLE等[12]利用攝像頭對車前路面信息采集處理后,對全車進行控制,能有效解決延時的問題,YOU等[13]雖然采用了簡單的“on-off”控制,但由于增加了預測技術,因而控制器性能得以大幅提高;MICHAEL等[14]利用預測控制,將半主動控制做成類似主動控制的效果,對于低頻的激勵具有明顯的抑制作用;RIOFRIO等[15]利用Kalman濾波預估了路面信息;WANG等[16]采用了魯棒預測控制。與普通的控制算法相比,預測控制的效果更為理想。
盡管上述研究取得了大量成果,能明顯改善車體行駛平順性,尤其是預測技術可以更進一步提高控制效果。然而,對于多輪車輛[17-19],每一個懸架的延時是不相等的。預測技術不能解決不相等延時這一問題。此外,預測技術本身也存在不準確的問題,如傳感器采集數據不準確,或采用前輪采集路面信息意味著前輪的時滯沒有解決,前懸架沒有處于預測控制下。針對這一問題,筆者試圖解決多輪車輛每個受控懸架時滯不相等這一問題,以進一步提高車輛穩定性。
1 多輪整車主動懸架數學模型
圖1為多輪整車主動懸架模型。

圖1 多輪車輛主動懸架模型
圖中:
1) 車身質量和載客質量等效為懸置質量M,縱向轉動慣量為Ip,橫向轉動慣量為Iy,且質量和轉動慣量均隨著M的不同在小范圍內變化,具有上下界;左/右側的車輪質量、剎車系統及其他連接質量分別等效為非懸置質量mli、mri(i=1,2,…,n)。
2) 懸置質量與非懸置質量通過彈簧和減振器連接,其左、右側作用力分別為Fsli、Fdli(i=1,2,…,n)和Fsri、Fdri(i=1,2,…,n);非懸置質量支撐在地面上的左、右側等效力分別為Ftli、Fbli(i=1,2,…,n)和Ftri、Fbri(i=1,2,…,n)。
3) 主動懸架中,左、右側作動器產生主動控制力分別為uli(t-τli)、uri(t-τri)(i=1,2,…,n),可用于改善乘坐舒適性,其中t為時間,τri為延時時間。
4) 每個懸架中心到懸置質量質心的縱向距離為ai(i=1,2,…,n),橫向距離為c。
5)z、zli和zri分別為車體和左右車輪的垂直位移;φ和ψ分別為車體的俯仰位移和側傾位移。
根據牛頓第二定律,多輪整車主動懸架模型的動態方程為
(1)
式中:
Ftli(t)=kuli(zli(t)-qli(t)),i=1,2,…,n;
Ftri(t)=kuri(zri(t)-qri(t)),i=1,2,…,n;
其中:qli和qri分別為左、右地面起伏位移,cli和cri分別為左、右懸架阻尼;kli和kri分別為左、右懸架剛度,culi和curi分別為左、右車輪等效阻尼,kuli、kuri分別為左、右車輪等效剛度。
(2)
式中:θ1=1/M,θ2=1/Ip和θ3=1/Iy均為可變參數,可隨M發生變化,滿足
θp∈νi={θ:θpmin≤θp≤θpmax},p=1,2,3。
(3)
1.1 實時控制器設計
定義跟蹤誤差為eh=xh-xhr(h=1,3,5),其中xhr(h=1,3,5)為參考信號,連續可導,則有
(4)
選擇xh+1(h=1,3,5)為式(4)的虛擬控制輸入,其理想函數為x(h+1)o,則定義跟蹤誤差
eh=xh-xho,h=2,4,6。
(5)
將式(5)代入式(4),可得
(6)
對式(5)求導,可得
(7)
選擇理想函數
(8)
式中:kh(h=1,3,5)為一正常數。
定義
(9)

定義自適應率
(10)
式中:
對于主動控制力,滿足
A3×2nu2n×1=B3×1,
(11)
式中:
B3×1=
方程(11)存在2n-3個解。不失一般性,不妨設其通解為
(12)
式中:kh(h=2,4,6)為一正常數。
考慮備選Lyapunov函數
(13)
對式(13)求導,并代入式(5)-(8)、(10)、(12),可得
(14)
整個無時滯補償控制器(multi Backstepping Adaptive Controller,mBAC)的結構如圖2所示。
1.2 多時滯補償控制器的設計
對于多輪車輛,每個懸架的作動器延時不相等。預測控制技術并未考慮作動器本身的延時,更未考慮每個作動器的延時不相等。由此,需要對上述的實時控制器進行改進。
對誤差e2、e4、e6進行補償,則有

(15)

選擇Lyapunov備選函數

(16)
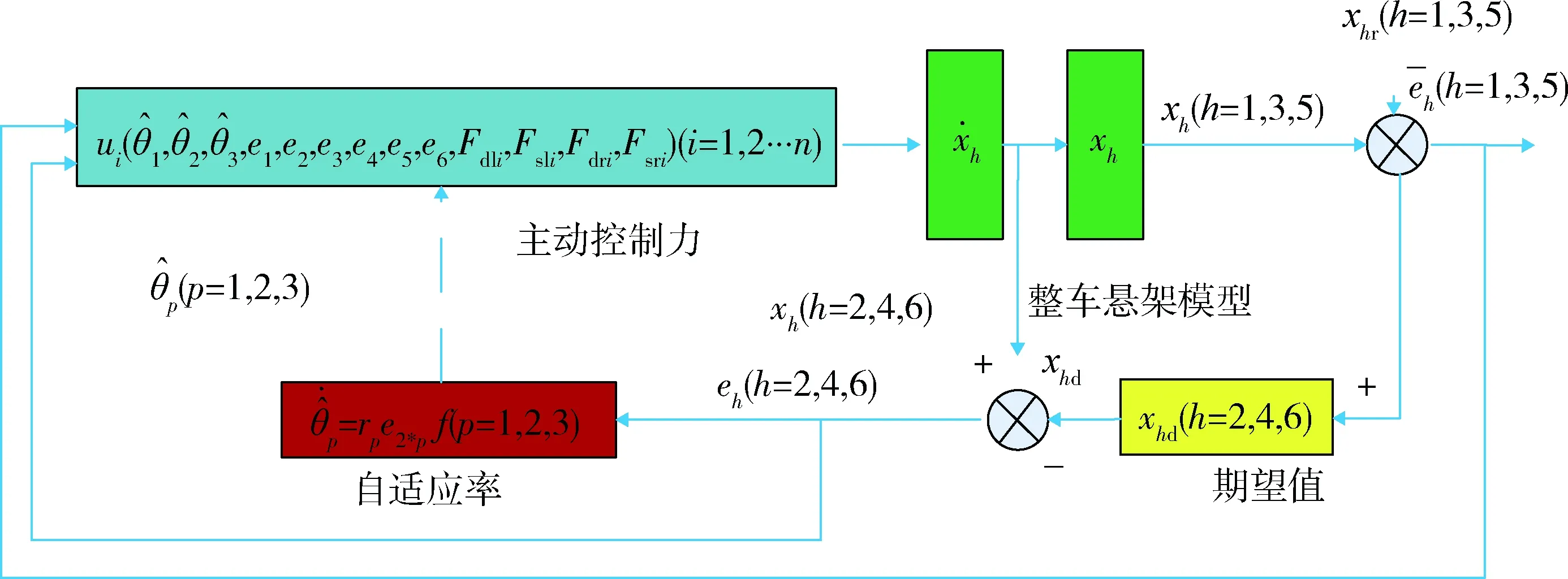
圖2 無時滯補償控制器
根據不等式性質,可得
(17)
對式(16)求導,可得

(18)

具有時滯補償控制器(multi-Backstepping Adap-tive Controller with Compensator,mBAC-C)結構如圖3所示。

圖3 具有時滯補償控制器結構
2 仿真驗證
多輪車輛懸架系統最簡單的模型是當n=2時,多輪車輛簡化為4輪車輛。對于4輪車輛主動懸架的控制,能反映所設計的控制器的性能。整車懸架模型參數如表1所示。控制器參數如表2所示。

表1 整車懸架模型參數

表2 控制器參數
2.1 不等時滯
多輪車輛的每一個主動懸架系統延時往往不同,此處用時滯補償控制器考察不等時滯對整車的影響。對于相等時滯,τli=τri=0.005 s;對于不等時滯,τl1=0.001 s,τr1=0.003 s,τl2=0.007 s,τr2=0.009 s。車體的垂直加速度功率譜密度(PSD)、俯仰角度功率譜密度和側傾角度功率譜密度變化曲線對比如圖4所示。圖中:ED代表相等時滯;uED代表不相等時滯。
由圖4可以看出:主動懸架中,時滯不相等時,車身垂直振動加速度和俯仰角度功率譜密度均更大。這說明,不相等時滯會惡化車身振動。實際車輛主動懸架系統的時滯也必然不相等,可以說明預測控制的作用有限。

圖4 相等時滯與不等時滯時的功率譜密度對比
2.2 時滯補償
為了說明時滯補償的作用,設定整車主動懸架的時滯不相等,即τl1=0.001 s,τr1=0.003 s,τl2=0.007 s,τr2=0.009 s。分別考察主動懸架中無時滯補償控制器(multi-Backsteeping Adaptive Controller,mBAC)和具有時滯補償控制器(mBAC-C)以及被動懸架作用下,車體的垂直加速度、俯仰角度和側傾角度及其功率譜密度變化情況,分別如圖5、6所示。
結合圖5、6可以看出:
1) 與被動懸架(Passive)相比,主動懸架中車身垂直振動加速度、俯仰角和側傾角的幅度和功率譜密度變化均較小。這說明主動懸架可以有效降低車身振動。
2) 與被動懸架相比,對于車體的側傾振動,主動懸架下車身振動幅度更小,但時滯補償的作用不明顯;對于車體的垂直振動和俯仰振動,主動懸架下車身振動幅度更小,時滯補償作用明顯。
上述現象說明,具有時滯補償的控制器性能明顯好于不具有時滯補償的控制器。

圖5 主、被懸架下的控制效果對比
車體振動的均方根值(RMS)如表3所示,可以看出:與被動懸架及無時滯補償控制的主動懸架相比,具有時滯補償控制器的主動懸架車身垂直振動加速度及車身俯仰和側傾角度均更小,說明具有時滯補償的主動懸架控制器性能更優。
2.3 單位距離時滯的影響
考察單位距離時滯對車體振動的影響。1)車體縱向時滯增大:τl1=0.021 s,τr1=0.021 s,τl2=0.012 s,τr2=0.012 s;2)車體橫向時滯增大:τl1=0.021 s,τr1=0.014 s,τl2=0.018 s,τr2=0.012 s;3)普通時滯:τl1=0.014 s,τr1=0.014 s,τl2=0.012 s,τr2=0.012 s。這3種時滯在主動控制器(時滯補償)下對車體振動的影響如圖7所示。
從圖7可以看出:

圖6 主、被動懸架下的功率譜密度對比

懸架垂直振動加速度/(m·s-2)俯仰振動角度/rad側傾振動角度/rad被動懸架0.684 20.043 50.005 2無時滯補償主動控制懸架0.313 70.026 10.000 9有時滯補償主動控制懸架0.130 90.026 30.000 2
1) 與普通時滯時相比,當車體縱向時滯增大時,車體垂直振動和俯仰振動功率譜密度增大;
2) 當橫向時滯增大時,整車振動的功率譜密度變化較小,可以忽略不計;
3) 考慮到車體橫向尺寸小、縱向尺寸大,這說明在單位距離時滯相等的情況下,主動懸架中心與車體質心距離越大,時滯作用越明顯。

圖7 不同時滯下的功率譜密度變化曲線
3 結論
筆者建立了多輪車輛主動懸架模型,設計了無時滯補償的主動控制器。在此基礎上,通過增加時滯補償器,形成解決主動懸架時滯不相等這一問題的一般方法。對設計的控制器進行了仿真,主要結論如下:
1) 與相等時滯相比,每個主動懸架時滯不相等對車體振動影響更大,更加惡化車體垂直和俯仰振動。
2) 所設計的具有時滯補償的控制器能解決時滯不相等這一問題,降低車輛振動。這一方法可以處理多輪車輛多時滯問題,具有一般性。
3) 主動懸架中心與車體質心距離越大時,時滯的影響更明顯。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
