消防機器人用中空兩相混合式步進(jìn)電動機設(shè)計
2019-11-25 07:46:22劉濤
微特電機 2019年11期
劉 濤
(中國電子科技集團(tuán)公司第二十一研究所,上海 200233)
0 引 言
消防機器人是一種特種機器人,隨著社會經(jīng)濟(jì)的不斷發(fā)展,其需求越來越明顯。目前,它主要用于危險化學(xué)品和易燃易爆物品以及倉儲和辦公樓宇。消防機器人的出現(xiàn)可以幫助消防員及時獲取火災(zāi)現(xiàn)場實時信息,甚至在無人狀態(tài)實現(xiàn)自動滅火,它在消防救援中發(fā)揮了非常重要的作用[1]。
現(xiàn)今,大多數(shù)發(fā)達(dá)國家正不斷推進(jìn)消防機器人的升級進(jìn)程,開始由低智能被動消防向高智能主動型機器人轉(zhuǎn)變的研究工作[2]。國際上對消防機器人的研究大致可分為三個階段,第一代是采用傳統(tǒng)程序控制消防機器人,機器人本體只能通過固定程序進(jìn)行消防工作;第二代消防機器人具有一定感覺功能,例如對煙霧與溫度感應(yīng);第三代為智能化消防機器人,可以提前對現(xiàn)場進(jìn)行檢測及預(yù)判,主動實施消防工作[3]。目前,市面上常見的室內(nèi)消防噴頭主要采用溫度或煙霧檢測并大范圍噴灑進(jìn)行滅火,很難對著火點進(jìn)行精確定位并實施噴淋。本文介紹一種新型智能消防機器人,可以通過紅外監(jiān)測著火點的溫度及圖像,同時實施精確定位,并對著火點進(jìn)行小范圍噴淋,達(dá)到快速精確滅火的效果。
本文介紹的混合式步進(jìn)電動機主要用于消防機器人中的關(guān)節(jié)轉(zhuǎn)向系統(tǒng),是系統(tǒng)中的主要驅(qū)動動力元件。同時,此電動機具有體積緊湊、可靠性好、位置精度高等特點,同時在各種關(guān)節(jié)傳動系統(tǒng)中有廣泛的應(yīng)用價值。
1 基本結(jié)構(gòu)和原理
本文首先針對智能消防機器人使用環(huán)境的要求,通過分析不同轉(zhuǎn)向關(guān)節(jié)的運行特性及安裝結(jié)構(gòu)的要求,采用分析軟件對混合式步進(jìn)電動機本體進(jìn)行了電磁性能優(yōu)化設(shè)計,設(shè)計出具有體積小、保持轉(zhuǎn)矩高等特點的兩相混合式步進(jìn)電動機,并且采用了4倍細(xì)分的驅(qū)動控制方式,實現(xiàn)電動機裝置的定位精度要求。
1.1 混合式步進(jìn)電動機基本結(jié)構(gòu)
電動機主要結(jié)構(gòu)形式如圖1所示。
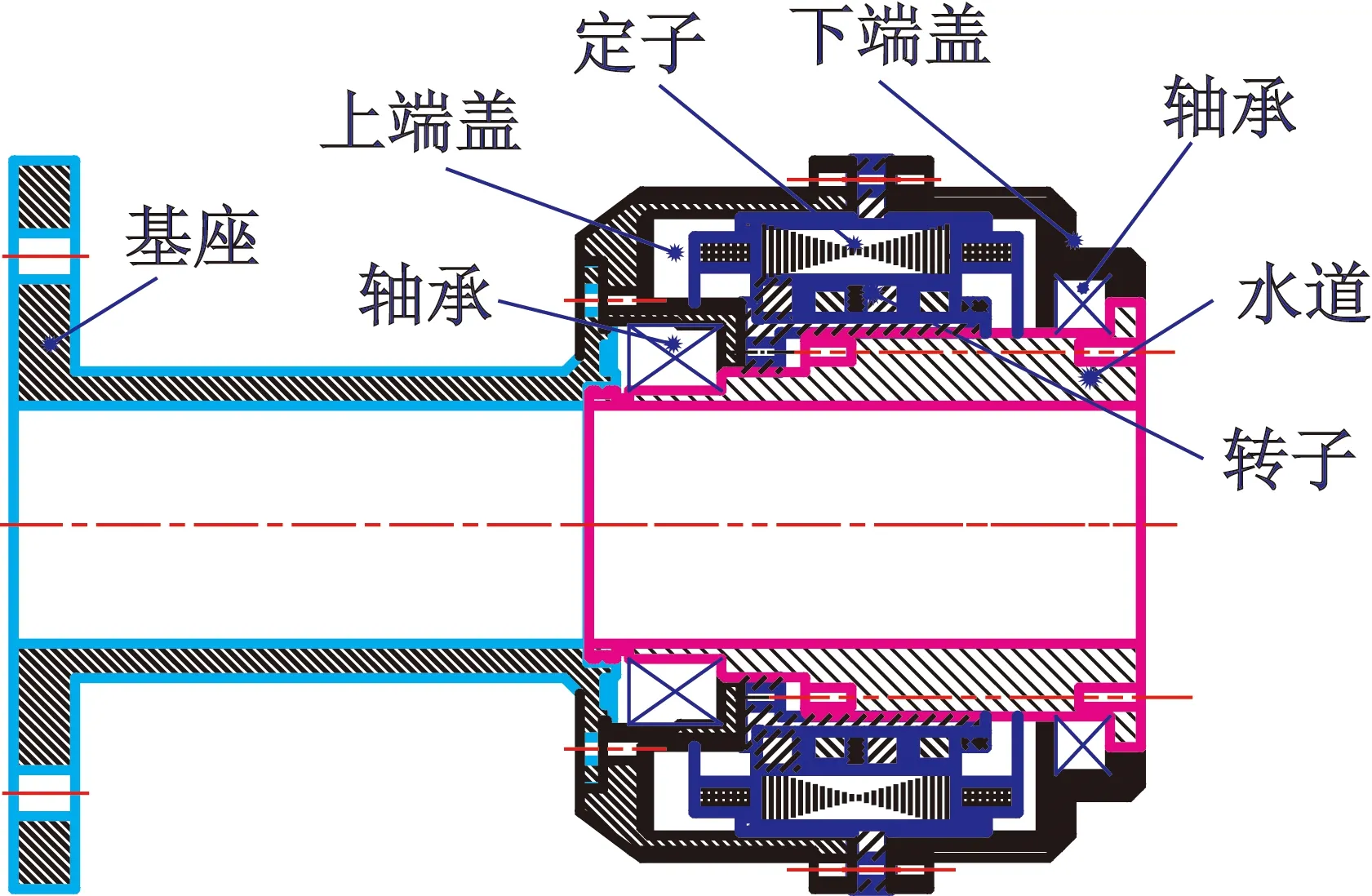
圖1 混合式步進(jìn)電動結(jié)構(gòu)形式
電動機為組裝式結(jié)構(gòu),采用扁平盤式結(jié)構(gòu)的徑向磁路,轉(zhuǎn)子軸為中空結(jié)構(gòu),轉(zhuǎn)軸內(nèi)部有水流通過,定子通過熱輻射傳導(dǎo)熱量,轉(zhuǎn)子通過水道中的水流進(jìn)行熱量傳遞,確保整個電動機溫度平衡。
1.2 主要工作原理
本電動機為徑向磁路混合式步進(jìn)電動機,電機定子鐵心采用繞組鑲嵌在定子槽中,兩相繞組間隔一個槽距,轉(zhuǎn)子采用稀土永磁材料作為永磁體。當(dāng)定子繞組通電時,通電線圈產(chǎn)生一矢量磁場。該矢量磁場與轉(zhuǎn)子磁極相互作用,電磁力帶動電機轉(zhuǎn)子旋轉(zhuǎn)一個固定角度。每輸入一個電脈沖,電機轉(zhuǎn)子隨著前進(jìn)一步。電動機轉(zhuǎn)子輸出的角度與驅(qū)動器端輸入的脈沖數(shù)成正比,電動機轉(zhuǎn)速與輸入脈沖的頻率成正比。通過調(diào)節(jié)驅(qū)動器可以控制脈沖數(shù)量、頻率及各相繞組的通電順序,來控制步進(jìn)電動機的運行。
2 設(shè)計內(nèi)容
針對智能消防機器人關(guān)節(jié)轉(zhuǎn)向系統(tǒng)對混合式步進(jìn)電動機的要求,本文的主要研制內(nèi)容如下。
2.1 電磁設(shè)計
根據(jù)用戶的使用需求,在智能消防機器人關(guān)節(jié)轉(zhuǎn)向系統(tǒng)運行時需要保證1°的位置定位精度,在定位完成后電動機需要輸出大于1 N·m的保持轉(zhuǎn)矩,以確保在大流量水流噴出時產(chǎn)生的反作用力下整個系統(tǒng)定位的穩(wěn)定性。
針對用戶的技術(shù)要求,本電動機設(shè)計轉(zhuǎn)子齒數(shù)為100,每個齒距為3.6°,當(dāng)電動機按兩相雙四拍運行時,步距角為3.6°/4=0.9°。
電動機的電磁轉(zhuǎn)矩Te:
pImMsr(-iAsinθ+iBcosθ)
(1)
式中:p為電動機轉(zhuǎn)子部分的細(xì)分齒數(shù);Im為等效的永磁體勵磁電流;L2為定子繞組自感基波分量;Msr為定轉(zhuǎn)子之間互感的等效系數(shù)[4-5]。
二相激磁時,保持轉(zhuǎn)矩計算:
(2)
2.2 一體化的結(jié)構(gòu)設(shè)計
為了進(jìn)一步減小智能消防機器人的體積,本電動機采用了電動機與消防水道嵌入式的結(jié)構(gòu)形式,即電動機的轉(zhuǎn)軸采用中空設(shè)計,消防水道與電機的轉(zhuǎn)軸緊密結(jié)合在一起,定子部分采用環(huán)氧澆注。這種結(jié)構(gòu)形式具有如下優(yōu)點:
1) 采用嵌入式結(jié)構(gòu),消防噴水的水道與電機整體設(shè)計在一起,可以極大地減小電機整體空間,利用電機轉(zhuǎn)子直接驅(qū)動噴水水道,控制噴水口的方位及旋轉(zhuǎn)角度,達(dá)到精確控制噴灑區(qū)域的位置,確保噴灑的精準(zhǔn)度。
2) 定子采用環(huán)氧整體澆注,可以將定子繞組與電動機內(nèi)的水進(jìn)行隔離,確保電機繞組的絕緣可靠性;同時采用環(huán)氧澆注方式,可以增強定子部分的整體機械強度,保證電動機在整體運行時可以有效地降低對外界沖擊、振動;采用環(huán)氧澆注的方式還可以提高電機的整體散熱效果,環(huán)氧將電動機繞組與殼體有效連接在一起,在確保絕緣要求的前提下采用高導(dǎo)熱系數(shù)的環(huán)氧可以減小電動機的熱阻,降低電動機散熱的溫度梯度,確保定子繞組產(chǎn)生的熱量可以迅速地通過殼體散發(fā)。
2.3 自鎖定設(shè)計
針對智能消防機器人的使用需求,在噴水運行時需要較大的保持轉(zhuǎn)矩施加在電動機轉(zhuǎn)動部件上,否則在大流量水流噴出時產(chǎn)生的反作用力會使轉(zhuǎn)動關(guān)節(jié)偏轉(zhuǎn),這樣電動機的定位精度就會受到很大的影響。針對這樣的使用要求,通常采用的設(shè)計方式是在電動機同軸安裝一個制動器,當(dāng)電動機運行到指定位置時打開制動器,利用制動器產(chǎn)生的制動轉(zhuǎn)矩將轉(zhuǎn)子位置鎖定,但是這樣就需要同軸增加一個制動器,不僅提高了成本,增加了加工難度,同時還降低了可靠性。本文利用步進(jìn)電動機的保持轉(zhuǎn)矩來實現(xiàn)電動機的制動需求。當(dāng)電動機旋轉(zhuǎn)到指定位置時停下,在噴水開關(guān)打開之前給驅(qū)動器發(fā)出指令,給電機繞組通以一個較大的電流,電機產(chǎn)生較大的制動轉(zhuǎn)矩將電機轉(zhuǎn)軸固定,這樣噴水裝置噴淋時產(chǎn)生的反作用力就無法轉(zhuǎn)動電機關(guān)節(jié),達(dá)到精確定位的要求。
3 測試結(jié)果
兩關(guān)節(jié)混合式步進(jìn)電動機樣機如圖2所示,并對混合式步進(jìn)電動機進(jìn)行了測試。
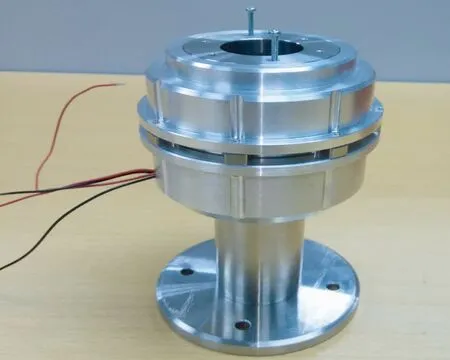
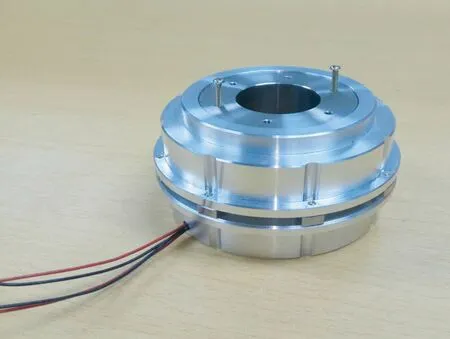
圖2 兩關(guān)節(jié)混合式步進(jìn)電動機樣機
電動機空載運行時輸入電壓28 V,電流0.34 A,轉(zhuǎn)速240 r/min。電動機及控制器與智能消防機器人整體裝配較好,電動機直接驅(qū)動質(zhì)量為10 kg的噴水機構(gòu),接收到位置指令后,兩關(guān)節(jié)步進(jìn)電動機聯(lián)動,驅(qū)動機器人噴水裝置旋轉(zhuǎn)到位后,驅(qū)動器給出制動指令,給電機繞組通電流3 A,產(chǎn)生保持轉(zhuǎn)矩1.3 N·m。噴水時整個系統(tǒng)可以準(zhǔn)確定位,噴灑面積完全覆蓋指定區(qū)域,整個系統(tǒng)運行正常。
4 結(jié) 語
本文采用嵌入式結(jié)構(gòu)設(shè)計,保證系統(tǒng)體積緊湊,降低了消防機器人的質(zhì)量;通過特殊的中空轉(zhuǎn)軸水道結(jié)構(gòu)設(shè)計,確保了系統(tǒng)水流通行;采用兩關(guān)節(jié)聯(lián)動的方式,確保噴水系統(tǒng)對受控區(qū)域的全覆蓋噴淋。
