一種地下空洞三維激光掃描儀的設計與應用
2019-11-22 08:48:36樓加丁楊新明
陜西水利 2019年10期
丁 朋,樓加丁,楊新明
(中國電建集團貴陽勘測設計研究院有限公司,貴州 貴陽 550081)
0 引言
溶洞、采空區等地下空洞會對水利水電、市政、交通等工程的建設造成威脅,因此對地下空洞的精確探測也更加迫切。地下空洞探測對于填充工程施工中遇到的地下溶洞、消除地下采空區安全隱患、分析地質構造等具有重要意義。
常見的地質探測手段包括電法、瞬變電磁、探地雷達、地震反射探測、地質鉆探、鉆孔電視等[1],這些常規探測手段能夠找到地下空洞的大致位置,但是無法或者很難確定地下空洞的大小、形狀和走向。由于地下空洞普遍存在高溫、高濕、空間狹小、可視性差、通訊信號差、危險性大等情況,人員根本無法進入或者由于安全原因不宜進入,無法實施人工接觸測量,因此也就無法確定地下空洞的大小、形狀和走向。
三維激光掃描技術克服了傳統測量的局限性,具有快速、無接觸、精度高、主動性強及全數字特征等優點[2~5]。地下空洞三維激光掃描系統能夠對地下空洞的內部結構實施精確測量,但是技術實現較為復雜,目前,國內外能夠對地下空洞的內部結構進行三維精確掃描且效果良好的裝置,僅有Optech公司的CMS系列空區三維激光掃描系統和MDL公司的C-ALS地下洞穴三維激光掃描系統[1]。上述系統由于價格昂貴,技術壁壘嚴重,很難在國內普及應用。本文設計了一種簡易的探測地下空洞三維結構的激光掃描裝置——LS-1地下空洞三維激光掃描儀,該裝置結構簡單、操作方便、性能穩定,實現了對溶洞、采空區等地下空洞的自動化掃描,利用采集到的點云數據,可以較為準確地計算出地下空洞的幾何形態,為工程設計、施工和評價提供可靠的基礎資料。
1 實現原理
1.1 激光的特點
激光具有普通光所完全不具備的四大特性[6]:
(1)定向發光。普通光源向四面八方發光,而激光的發光方向可以限制在0.001弧度立體角內,接近水平。
(2)亮度極高。激光是當代最亮的光源,盡管激光的總能量并不一定很大,但能量高度集中,激光的亮度與陽光之間的比值是百萬級的,而且它是人類創造的。
(3)單色性好。光首先是一種電磁波,光的顏色取決于它的波長。普通光源發出的光通常包含著各種波長,是各種顏色光的混合,而激光的波長只集中在十分窄的光譜波段或頻率范圍內。
(4)相干性好。干涉是波動現象的一種屬性,基于激光具有高方向性和高單色性的特性,相干性極好。
1.2 實現原理
地下空洞三維激光掃描技術的核心是掃描位置驅動、距離測量和方位測量。在進行實際測量作業時,三維激光掃描儀對地下空洞的某一處洞壁發射窄束激光脈沖,之后計算激光脈沖從發出到經被測洞壁表面反射回儀器所用的飛行時間,再計算出待測距離(見圖1),同時輔助以電子羅盤、陀螺儀或傾角傳感器等方位測量模塊,實時記錄、計算發射出去的窄束激光脈沖在水平與垂直方向上的角度值,以獲得某一點的三維相對坐標。在電機的驅動下自動掃描空洞的內壁,最終獲取整個空洞的三維點云數據[1~3,5~7]。
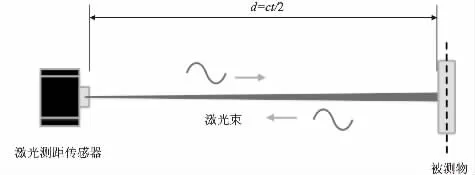
圖1 激光測距原理示意圖
2 設計思路
LS-1地下空洞三維激光掃描儀總體設計框架見圖2。
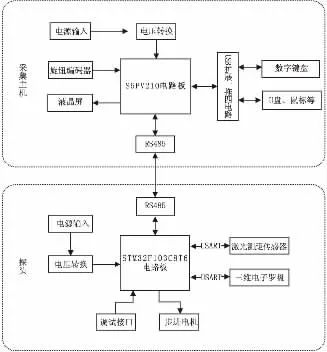
圖2 系統總體設計框架
系統主要分為井上采集主機和井下探頭兩部分,采集主機電路使用基于ARM CortexTM-A8內核的S5PV210處理器,采集軟件基于WinCE6.0下的MFC框架設計,主要由人機交互、通信、數據采集與顯示、文件讀寫、數據處理五大功能模塊組成。探頭主要由STM32控制板、集電環、步進電機、激光測距傳感器、三維電子羅盤、不銹鋼金屬外殼等組成,其中激光測距傳感器用來測量激光束發射點到洞壁之間的距離,最大探測距離30 m以上;三維電子羅盤與激光測距傳感器固定在一起,用來定位激光束的發射方向;步進電機用來驅動激光測距傳感器與三維電子羅盤一起水平360°旋轉。絞車主要由手柄、傳動裝置、停止器和電纜線等組成。采集主機和探頭之間采用RS485數字通信方式。
3 系統簡介
LS-1地下空洞三維激光掃描儀是一套鉆孔式地下空洞三維激光掃描系統,克服了傳統測量技術的局限性,采用非接觸主動測量方式來直接獲取高精度的三維數據,能夠對空洞內壁進行從上到下(或者從下到上)逐層水平360°自動化掃描,具有精度高、實時性強、安全性高等特點,系統結構簡單、使用便捷,實現了對工程勘察、施工過程中遇到的地下空洞的幾何形態的無接觸式精確測量。系統主要由地面采集主機、探頭、絞車、孔口滑輪、連接線(連接絞車和采集主機)等組成,實物見圖3。

圖3 LS-1地下空洞三維激光掃描儀
(1)探頭:在采集主機的指令控制下,實現對水平斷面輪廓的360°全周掃描,并將掃描生成的點云數據傳回至采集主機。
(2)采集主機:用于數據采集、斷面輪廓顯示、數據管理等。采集主機工作界面見圖4。

圖4 采集主機工作界面
(3)絞車:用于收放探頭,并與連接線一起實現采集主機與探頭之間的通信連接。
(4)附屬設施:包括井口滑輪、連接線等。
4 使用方法
系統工作示意圖見圖5。

圖5 系統工作示意圖
系統采用非接觸式激光測距方式,從上到下(或者從下到上)按照設定的角度間隔逐層水平360°掃描一圈獲取空洞的輪廓點云,每個掃描斷面最多可采集3600個點云數據,以保證輪廓的還原精度,同時軟件支持單點復合采集,即一周采集完之后,用戶可以通過采集軟件的輪廓預覽功能模塊判斷某些采集值是否異常,如果有異常,經過簡單的設置,系統可以通過旋轉電機將激光測距傳感器和三維電子羅盤定位到這些采集點重新進行測量,待整個空洞掃描完畢之后,再利用室內三維建模處理軟件生成三維模型,計算出空洞的大小、形狀和走向。
采集時系統工作流程見圖6,采集過程主要遵循以下八個步驟:
第1步:參數設置;
第2步:放置探頭到某個位置;
第3步:根據情況修改參數;
第4步:根據情況對儀器校準;
第5步:數據采集;
第6步:對部分數據復核重采;
第7步:數據存盤;
第8步:循環執行上述步驟2~7,直至地下空洞內部結構掃描完畢為止。
注意采集過程中,務必保持探頭不動。

圖6 系統工作流程圖
5 工程應用
某水電站為Ⅱ等大(2)型工程,工程樞紐由碾壓混凝土重力壩、壩身溢流表孔、左岸引水系統、左岸地下廠房及右岸預留通航建筑物等組成。電站裝機容量558 MW(3×180 MW+1×18 MW),保證出力97 MW,多年平均發電量15.61億kWh。水庫正常蓄水位585 m,死水位580 m,正常蓄水位以下庫容1.365億m3,調節庫容0.307億m3,水庫具有日調節性能。
電站在進行右岸上層帷幕幕墻灌漿施工過程中,鉆孔SCWM-ZK-9在鉆孔施工過程中發現巖溶(鉆孔過程當中發生落鉆5m現象),為研究落鉆區域巖溶特征,采用了LS-1地下空洞三維激光掃描儀進行探測,根據以鉆孔為中心的可測試范圍內掃描采集數據繪制了可測區域巖溶走向(圖7),確定溶洞走向為近東西向,且東小西大,東高西低。根據數據體模擬可測區域外邊界推算巖溶體積,三維立體顯示溶洞呈“胃”狀,估算體積約150 m3(圖8)。為電站帷幕提供了設計依據。
電站根據探測成果結合巖溶危害性,決定從中層灌漿廊道延長帷幕線揭露巖溶區,后經開挖揭露落鉆區域巖溶高度4 m~6 m,寬度 4 m~7 m,長度 6 m~8 m,體積約為 150 m3,延伸方向近東西向,形體、走向與探測成果一致,三維激光掃描儀探測的溶洞精度完全滿足要求。

圖7 巖溶走向圖

圖8 巖溶區局部三維視圖
6 結語
針對地下空洞三維結構探測的需求及工作中遇到的大量地下空洞(主要是溶洞)的特點,提出了一種簡易鉆孔式三維激光掃描儀的設計方案,并自主研發了LS-1地下空洞三維激光掃描儀,為驗證整個系統的實際探測能力及工作效果,對某水電站右岸頂層巖溶區進行現場試驗,試驗結果表明采用該系統能夠準確地探明溶洞的大小、形態和走向,為溶洞的后續施工處理提供了可靠的基礎資料。
目前,系統還存在一些缺陷,如:無法實時觀察洞內情況和只適用于非填充型地下空洞內部形態的探測等。下一步將嘗試通過添加紅外攝像功能、超聲波測距功能等技術手段,使其更加完善,應用范圍更加廣泛。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
