一種用于搜索雷達(dá)的交互多模型跟蹤濾波算法
2019-11-18 05:18:54藺紅明魏兵卓周夢龍
無線電工程 2019年12期
關(guān)鍵詞:模型
藺紅明,魏兵卓,曹 政,王 磊,周夢龍
(上海機(jī)電工程研究所,上海 201109)
0 引言
隨著導(dǎo)彈技術(shù)的發(fā)展,新型反艦導(dǎo)彈層出不窮,防空導(dǎo)彈武器系統(tǒng)面臨更加嚴(yán)峻的挑戰(zhàn)。新型反艦導(dǎo)彈普遍具備超強(qiáng)的機(jī)動能力,可在飛行末端做出多種機(jī)動動作,如水平蛇形機(jī)動[1-4]、圓周機(jī)動和躍起后的俯沖機(jī)動[5]等,以此完成對防空導(dǎo)彈武器系統(tǒng)的突防[6],對防空系統(tǒng)構(gòu)成了巨大威脅。因此,攔截這類目標(biāo)是現(xiàn)代防空導(dǎo)彈系統(tǒng)的重要使命,這就要求雷達(dá)系統(tǒng)對機(jī)動目標(biāo)具備更強(qiáng)的跟蹤能力和目標(biāo)運動軌跡的預(yù)測能力[7]。
國內(nèi)外搜索雷達(dá)數(shù)據(jù)處理大多采用卡爾曼濾波[8]、α-β濾波[9-13]、α-β-γ濾波[14-15]、自適應(yīng)卡爾曼濾波以及交互多模濾波算法等,在濾波過程中使用勻速模型(CV模型)、勻加速模型(CA模型)等勻速直線運動、勻加速直線運動模型。在目標(biāo)非機(jī)動或機(jī)動較弱的情況下,跟蹤精度較好,但在目標(biāo)大機(jī)動運動時,往往存在跟蹤數(shù)據(jù)滯后、跟蹤精度大幅下降甚至導(dǎo)致目標(biāo)跟蹤丟失,嚴(yán)重影響防空導(dǎo)彈武器系統(tǒng)的性能發(fā)揮。
由于目標(biāo)機(jī)動性能與運動特性不可知,單一模型濾波算法難以滿足精度要求,可靠性差。本文針對上述問題,提出了一種用于搜索雷達(dá)的新交互多模型跟蹤濾波算法。該算法將系統(tǒng)的運動模式映射為模型集,基于每個模型的濾波器并行工作,利用各濾波器輸出的殘差信息及先驗信息,選擇最優(yōu)濾波器輸出當(dāng)前目標(biāo)運動信息,實現(xiàn)對機(jī)動目標(biāo)運動信息的估計。與傳統(tǒng)濾波算法相比,本文方法通過實時對目標(biāo)的運動狀態(tài)估計,基于目標(biāo)的運動狀態(tài)選擇合適的濾波器輸出目標(biāo)預(yù)測信息,提高了對機(jī)動目標(biāo)的跟蹤和預(yù)測能力。
1 考慮蛇形機(jī)動的交互多模型濾波算法
1.1 目標(biāo)運動模型描述
采用基于CV模型和CA模型的交互多模型濾波算法(IMM)。IMM算法是基于運動模型集的并行濾波算法,目標(biāo)模型是濾波算法的基礎(chǔ),濾波結(jié)果的準(zhǔn)確性與模型保真度息息相關(guān)。本文主要采用以下2種目標(biāo)運動模型。
1.1.1 CV模型
勻速運動目標(biāo)的運動狀態(tài)可用CV模型表示,即:
(1)

設(shè)采樣時間為T,將式(1)進(jìn)行離散化處理后可得狀態(tài)方程的離散化形式為:
(2)
1.1.2 CA模型
勻加速運動目標(biāo)的運動狀態(tài)可用CA模型表示,即:
(3)

(4)
CV模型和CA模型是最常用的目標(biāo)跟蹤模型,幾乎每一種物體的運動方式都會包含這2種模式,但在實際情況中,目標(biāo)一直做勻速直線運動的時候很少,目標(biāo)機(jī)動較弱時采用勻加速模型對其進(jìn)行跟蹤,但不適用于強(qiáng)機(jī)動的目標(biāo)跟蹤,如反艦導(dǎo)彈超低空突防時的蛇形機(jī)動、躍起俯沖機(jī)動等強(qiáng)機(jī)動場景。本文基于強(qiáng)機(jī)動時的目標(biāo)運動特性,構(gòu)造CV模型和CA模型對應(yīng)的濾波器(α-β濾波和α-β-γ濾波),α-β-γ濾波通過刻畫目標(biāo)運動的加速度的變化,并結(jié)合雷達(dá)探測精度,實時補(bǔ)償目標(biāo)的速度濾波值,降低目標(biāo)強(qiáng)機(jī)動時的濾波延遲,使濾波輸出更加貼近目標(biāo)真實運動情況,跟蹤精度更高。
1.2 坐標(biāo)轉(zhuǎn)換
本文的濾波算法為直角坐標(biāo)系下的濾波處理,需將雷達(dá)探測的球坐標(biāo)下的目標(biāo)數(shù)據(jù)轉(zhuǎn)化為直角坐標(biāo)形式。記目標(biāo)球坐標(biāo)的3個坐標(biāo)分量為距離、方位角、仰角(R,β,ε),目標(biāo)直角坐標(biāo)的3個坐標(biāo)分量為(X,Y,Z)。球坐標(biāo)轉(zhuǎn)直角坐標(biāo)由式(5)~式(7)表示:
X=R·cosε·cosβ,
(5)
Y=R·sinε,
(6)
Z=R·cosε·sinβ。
(7)
1.3 直角坐標(biāo)系下的α-β濾波算法
α-β濾波器的主要工作原理構(gòu)成為:
當(dāng)n=1時:
(8)
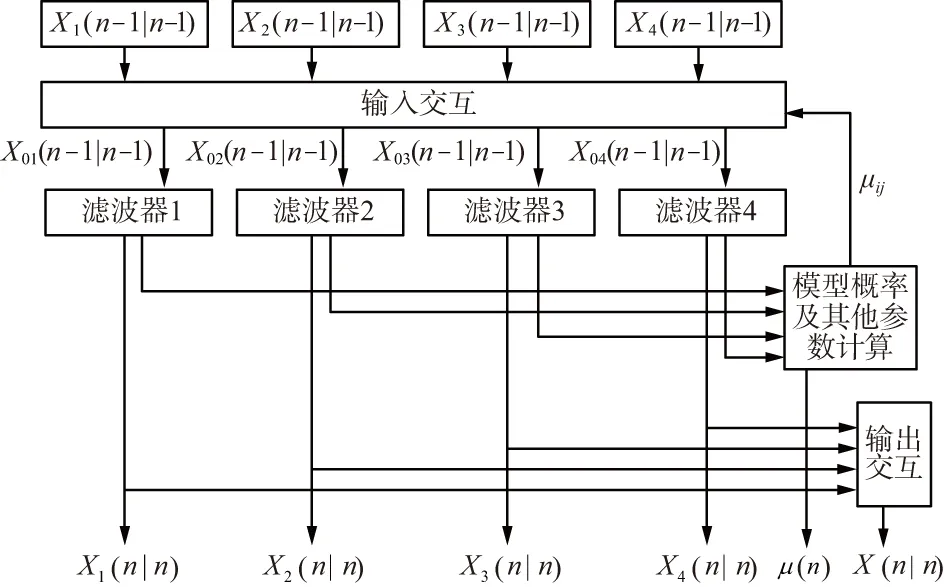
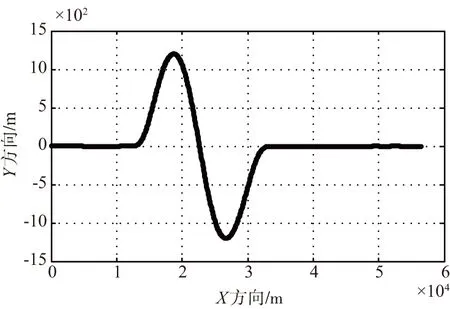
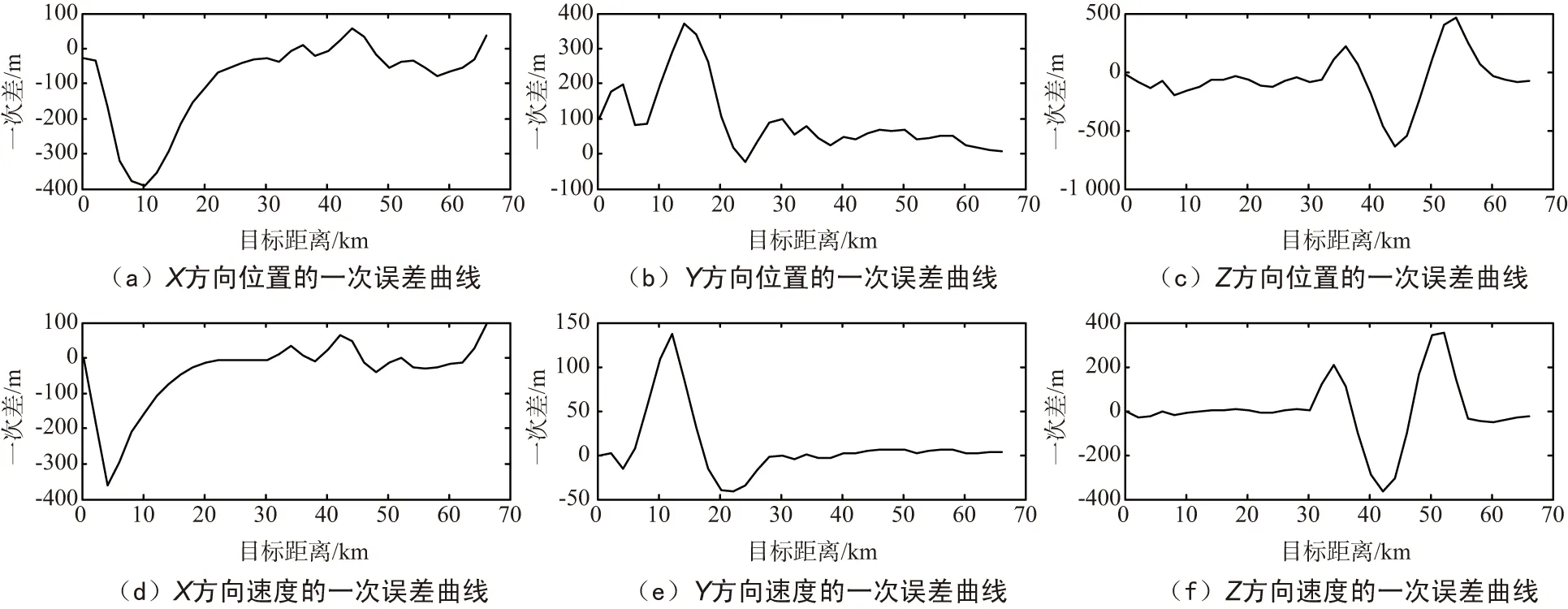
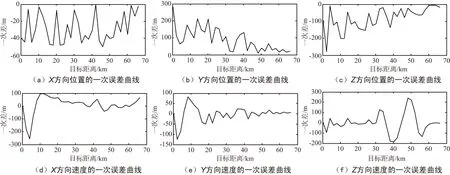
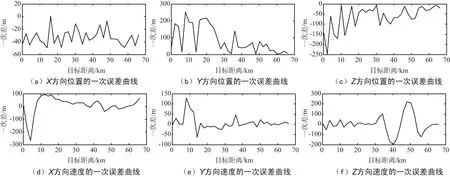
當(dāng)1 預(yù)測值計算: (9) 新息計算: ν(n)=X(n)-X(n|n-1)。 (10) 濾波值計算: (11) 式中, (12) X(n),V(n)為探測數(shù)據(jù)輸入值;X(n|n-1)為位置預(yù)測值;X(n|n)為位置濾波值;V(n|n-1)為速度預(yù)測值;V(n|n)為速度濾波值;Δt為前后兩點數(shù)據(jù)對應(yīng)時刻的時間差;Nw為觀察區(qū)間的點數(shù)(即滑窗點數(shù))。 當(dāng)n>Nw時,取n=Nw。 α-β-γ濾波器的主要工作原理構(gòu)成為: 當(dāng)n=1時: (13) 當(dāng)1 預(yù)測值計算: (14) 新息計算: ν(n)=X(n)-X(n|n-1)。 (15) 濾波值計算: (16) 當(dāng)n≥2時,對濾波速度做如下處理: (17) 當(dāng)|ΔV′(n|n)|<|ΔV′(n-1|n-1)|,且V(n|n)≥0,且ΔV(n|n)≥0: V2(n|n)=V1(n|n)-ΔV(n|n)。 (18) 當(dāng)|ΔV′(n|n)|<|ΔV′(n-1|n-1)|,且V(n|n)≥0,且ΔV(n|n)<0: V2(n|n)=V1(n|n)+ΔV(n|n)。 (19) 當(dāng)|ΔV′(n|n)|<|ΔV′(n-1|n-1)|,且V(n|n)<0,且ΔV(n|n)≥0: V2(n|n)=V1(n|n)-ΔV(n|n)。 (20) 當(dāng)|ΔV′(n|n)|<|ΔV′(n-1|n-1)|,且V(n|n)<0,且ΔV(n|n)<0: V2(n|n)=V1(n|n)+ΔV(n|n)。 (21) 當(dāng)|ΔV′(n|n)|≥|ΔV′(n-1|n-1)|: V2(n|n)=V1(n|n), (22) V3(n|n)=V2(n|n)。 (23) 當(dāng)(V2(n|n)>V3(n-1|n-1),且V3(n-1|n-1)>V3(n-2|n-2),且V3(n-2|n-2)>V3(n-3|n-3)且|ΔV(n|n)|>σ,且|ΔV(n-1|n-1)|>σ,且|ΔV(n-2|n-2)|>σ)時, V3(n|n)=0.3×V2(n|n)-0.7×V3(n-1|n-1), (24) 式中, (25) X(n)為輸入值;X(n|n-1)為位置預(yù)測值;X(n|n)為位置濾波值;V(n|n-1)為速度預(yù)測值;V(n|n)為速度濾波值;V3(n|n)為最終速度濾波值;a(n|n-1)為加速度預(yù)測值;a(n|n)為加速度濾波值;Δt為前后兩點數(shù)據(jù)對應(yīng)時刻的時間差;Nw為觀察區(qū)間的點數(shù)(即滑窗點數(shù))。 當(dāng)n>Nw時,取n=Nw。 本文使用4套濾波器進(jìn)行交互濾波,2個α-β濾波器、2個α-β-γ濾波器,每個濾波器并行工作,利用各濾波器輸出的殘差信息及先驗信息,對目標(biāo)運動狀態(tài)做出判斷切換濾波器來實現(xiàn)對目標(biāo)的全航路跟蹤。而運動狀態(tài)的變化即濾波器的切換用Markov鏈表示。該算法是一種遞歸算法,算法包括以下幾個步驟:輸入交互、濾波、模型判斷和輸出交互,如圖1所示。 圖1 交互多模型濾波算法 1.5.1 輸入交互 首先根據(jù)上一時刻每個分模型的濾波信息Xi(n-1|n-1)以及上一時刻的模型切換概率P0j(n-1|n-1),計算當(dāng)前時刻每個模型的狀態(tài)輸入信息: μij(n-1|n-1), (26) [Xi(n-1|n-1)-X0j(n-1|n-1)]T}μij(n-1|n-1)。 (27) 式中,假設(shè)X0j(n-1|n-1),P0j(n-1|n-1)分別為模型j在經(jīng)過數(shù)據(jù)交互作用后的狀態(tài)估計和狀態(tài)協(xié)方差陣;μij(n-1|n-1)為模型的混合概率: (28) 各個模型間的轉(zhuǎn)移概率服從馬爾科夫過程,轉(zhuǎn)移概率矩陣為: (29) 式中,pij為從模型i到模型j的轉(zhuǎn)移概率,i,j=1,2,…,r。 1.5.2 濾波 根據(jù)輸入交互后得到的每個分系統(tǒng)模型的狀態(tài)信息X0j(n-1|n-1)和協(xié)方差矩陣P0j(n-1|n-1),結(jié)合系統(tǒng)的測量信息,基于各個分系統(tǒng)模型,進(jìn)行并行的狀態(tài)濾波,最終得到每個分系統(tǒng)模型狀態(tài)估計結(jié)果:Xj(n|n)及協(xié)方差矩陣Pj(n|n)。 1.5.3 模型概率更新 似然函數(shù): Λj(n)=N(rj(n),Sj(n))= (30) 概率更新: (31) 式中,c為歸一化常數(shù); (32) 1.5.4 輸出交互 (33) [Xj(n|n)-X(n|n)]T}μj(n)。 (34) 設(shè)雷達(dá)在水平面上的投影點為坐標(biāo)原點O,以正東方向為X軸,以正北方向為Y軸,鉛垂方向向上為Z(H)軸,目標(biāo)航向角為目標(biāo)航向與正北的夾角(順時針)。目標(biāo)超低空飛行,全速度大約為800 m/s,由正東方向進(jìn)入,臨近坐標(biāo)原點時做蛇形機(jī)動進(jìn)行突防,目標(biāo)的機(jī)動過載大約在10~20 g。 對雷達(dá)量測距離、角度分別加入相應(yīng)的白噪聲誤差,采樣頻率為0.5 Hz,作為仿真試驗數(shù)據(jù),分別采用α-β濾波、α-β-γ濾波和交互多模型濾波方法濾波跟蹤,加入不同大小的白噪聲誤差進(jìn)行多組仿真試驗。目標(biāo)位置水平投影如圖2所示。 圖2 目標(biāo)位置水平投影 通過數(shù)值仿真試驗的方法驗證交互多模型濾波算法的有效性,對比α-β濾波、α-β-γ濾波和交互多模型濾波算法的對相同目標(biāo)數(shù)據(jù)濾波后的誤差,主要包括:X,Y,Z,VX,VY,VZ與仿真試驗真值的系統(tǒng)誤差、起伏誤差及均方根誤差,Matlab仿真結(jié)果如圖3~圖5所示,均方根誤差的統(tǒng)計值如表1所示。 圖3 α-β濾波的誤差統(tǒng)計值 圖4 α-β-γ濾波的誤差統(tǒng)計值 圖5 交互多模型濾波的精度統(tǒng)計值 其中,圖3~圖5中的mean為系統(tǒng)誤差;var為起伏誤差;total為均方根誤差。 通過數(shù)值仿真試驗,從表1不同濾波算法的均方根誤差統(tǒng)計值可以看出,交互多模型濾波方法相比較α-β濾波和α-β-γ濾波,濾波精度有了很大提高。在目標(biāo)全航路既有非機(jī)動段,又有蛇形機(jī)動段,α-β濾波和α-β-γ濾波均不能很好地描述目標(biāo)的實際運動狀態(tài);而交互多模型濾波通過描述不同運動狀態(tài)的濾波器并行處理,根據(jù)濾波的殘差和先驗知識,選擇適合目標(biāo)當(dāng)前運動狀態(tài)的濾波器輸出濾波值,在跟蹤機(jī)動能力強(qiáng)的目標(biāo)時具備較好的跟蹤精度。 表1 不同濾波算法的均方根誤差統(tǒng)計值 濾波算法XYZVXVYVZα-β濾波151.213135.398228.341104.47638.080146.195α-β-γ濾波33.022105.337105.07070.50137.20394.593交互多模濾波17.56646.96765.95516.53715.00892.127 針對蛇形機(jī)動突防目標(biāo)的精確跟蹤問題,采用多模型交互濾波的方法,提出了適用于跟蹤機(jī)動目標(biāo)的α-β-γ濾波算法,再結(jié)合適用于跟蹤非機(jī)動目標(biāo)的α-β濾波算法,多個濾波器并行工作,實時計算每個濾波器的殘差,根據(jù)濾波的殘差和先驗知識選擇適應(yīng)目標(biāo)當(dāng)前運動狀態(tài)的濾波器輸出目標(biāo)預(yù)測信息。仿真結(jié)果表明,相比傳統(tǒng)濾波算法,該算法對蛇形機(jī)動目標(biāo)的跟蹤精度有了較大提升。解決了搜索雷達(dá)在跟蹤機(jī)動能力強(qiáng)的目標(biāo)時,跟蹤誤差大、濾波滯后的問題,有效地提升了搜索雷達(dá)對機(jī)動目標(biāo)的跟蹤能力。1.4 直角坐標(biāo)系下的α-β-γ濾波算法
1.5 交互多模型濾波算法

2 數(shù)值仿真試驗
2.1 航跡坐標(biāo)數(shù)據(jù)生成
2.2 交互多模型濾波算法仿真試驗

3 結(jié)束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24光學(xué)精密工程(2016年6期)2016-11-07 09:07:19