基于openmv的電磁炮智能控制系統
2019-11-13 01:33:45蘇瑞于浩周沛澤蘭揚
科技視界 2019年30期
蘇瑞 于浩 周沛澤 蘭揚

【摘 要】本文根據電磁曲射炮的工作原理,結合當前嵌入式系統設計方法實現了以STM32F103為核心的電磁炮智能發射控制系統,該系統由發射裝置和控制裝置兩部分組成,本文選擇基于 OpenMV 機器視覺模塊,通過調焦攝像頭識別標識物,實現對發射裝置方向的控制。通過對實驗數據的分析,得出最終控制算法,從而提高了電磁炮射擊落點的準確度。
【關鍵詞】電磁;升壓電路;OPENMV;角速度控制
中圖分類號: TJ866文獻標識碼: A 文章編號: 2095-2457(2019)30-0047-001
DOI:10.19694/j.cnki.issn2095-2457.2019.30.021
0 引言
電磁炮可以利用電磁能推動物體運動,其威力遠大于傳統的火炮,從而引起了國內外的廣泛關注。而OpenMV相較于其他視覺模塊,體積小、功能多且易于安裝,從而選擇OpenMV為基礎模塊,實現電磁炮的智能控制系統。
1 系統與方案
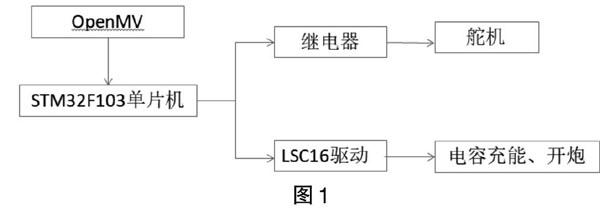
系統包括STM32F103單片機、升壓模塊、直流舵機、OpenMV、線圈,由OpenMV視覺模塊進行目標定位[1],進而由單片機控制電機來控制炮管的方向與速度,由電源控制線圈發射,達到精確命中目標的目的[2],框圖如下圖1:
圖1
電路方案選擇根據電容充放電原理,自行搭建電路。電容充電時間短,且放電的瞬間可以產生巨大電能,通過升壓模塊[3],將電壓儲存在電容中,可以有效控制鋼珠的發射。單片機方案選擇STM32F103單片機。STM32具有豐富的硬件資源,拓展性強,接口多且相對簡單,因為它本身帶有功能,工作速度快,高性能、低成本、低電壓、節能,外圍接口豐富,適用于要求功能多的裝置上。
單片機方案選擇STM32F103單片機。STM32具有豐富的硬件資源,拓展性強,接口多且相對簡單,因為它本身帶有功能,工作速度快,高性能、低成本、低電壓、節能,外圍接口豐富,適用于要求功能多的裝置上。
2 理論分析與計算
2.1 電磁炮參數計算與彈道分析
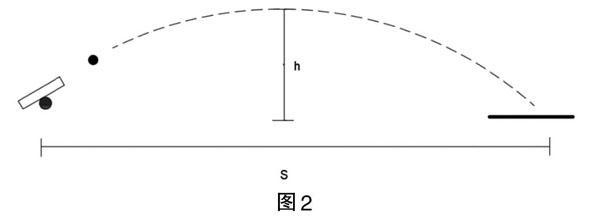
彈丸的出口速度可以由一對間距為10cm的對射廣電進行測量,可等效為炮口初速度vY=vsin?鄣,再由公式vy=2gh可以求出上升的最大高度。同時根據h=■gt■,vx=vcos?鄣,s=t■程序即可快速計算出射程。
圖2
2.2 電路參數
本電路采用逆變器將24V直流電升高至230V接入電路,且使用一個450V 1000μF電容作為整體的儲能元件,并在電容的正極連結整流二極管以防止電容在充電同時放電,且在電容電極輸入端接入4個功率電阻共計600Ω以限制充電電流在1A以下。在電路中接入可控硅來控制電容的放電過程,可控硅的控制端連接限流電阻接入24V電壓,在導通時使電容對線圈放電以發射鋼珠。
3 執行機構控制
執行機構選用云臺控制,以實現水平和豎直方向的精確旋轉,以達到精確控制的目的;通過STM32單片機與OPENMV的串口通信[4],OPENMV向STM32發送標識的坐標[5],單片機控制云臺瞄準,再控制繼電器控制充電時間和開火。同時也可以通過按鍵輸入坐標進行控制。
4 數據與分析
炮筒位置與炮筒仰角45度不變,改變供電時間,記錄其射程。
將以上兩組數據對比,經過MATLAB數據建模,得出充電時間與發射距離為非線性關系,充電時間越長曲線越平緩。
5 結論
本文采用的基于openmv的電磁炮智能發射系統是由發射裝置和控制裝置兩部分組成,發射裝置實現電能到磁場能量再到動能的能量轉換,從而推動被彈射物體獲得沖量向外運動。控制裝置主要通過控制舵機實現發射裝置水平角度的控制,通過兩部分的智能連接,實現了電磁炮的智能發射。
【參考文獻】
[1]馮曉暉.電磁炮物理模型構建與系統實現研究[J].黑龍江科學,2018(5):134-135.
[2]唐勇,費付聰,周延.自制演示型電磁炮及其相關研究[J].2015,36(1):47-48.
[3]邱關源.電路(第五版).北京:高等教育出版社,2006.126-129.
[4]張彥超.運動目標跟蹤技術的研究[D].北京:北京交通大學,2014.
[5]張毅,高進可,王琪,等.視覺導引智能車的自適應路徑識別及控制研究[J].測控技術,2017,36(11):23.