SVM提取地物方法中的參數研究
2019-11-12 04:21:16胡澄宇
科技資訊 2019年22期

摘? 要:使用SVM對LiDAR數據中進行分類,在進行分類的過程中,采用了樣本交叉驗證和LIBSVM中的網格法兩種方法對SVM的參數進行了討論。首先,先對LiDAR數據進行預處理;其次,通過兩種方法進行SVM分類參數的獲取;最后,通過精度的比較及分類結果的目視對比,分析參數選取方法,選取適宜的參數選取方法。
關鍵詞:LiDAR? SVM? 樣本交叉驗證? LIBSVM? 格網法? SVM分類參數? 分類提取
中圖分類號:TP181 ? ?文獻標識碼:A 文章編號:1672-3791(2019)08(a)-0045-02
機載激光雷達(LiDAR)作為新型的遙感技術,越來越受到人們的重視與使用;它能快速地采集地面點的空間信息與反射強度信息;利用它所提供的信息數據,我們能夠對地面物體進行分類,并提取出人們感興趣或特殊的地物做進一步的分析與利用。
而在LiDAR數據的眾多分類方法中,支持向量機(SVM)的使用較為廣泛,且分類精度較高。但由于該方法中存在分類參數的設置,使得分類結果十分依賴于參數優劣,可以說參數的選擇對分類結果有著至關重要的作用。所以,針對分類內容,如何選取適宜的SVM分類參數是一個值得研究的問題。
在過去諸多利用SVM進行LiDAR數據分類的研究中,它們有的對SVM的分類參數進行了一些說明,有的并未給出明確的選擇過程。例如,Mingjun Song和Daniel Civco(2004)在使用SVM對道路進行提取時使用了LIBSVM對參數進行選取[1];Zahra Azizi(2014)等人在對森林道路進行提取時對SVM參數未具體說明[2];喬紀綱(2013)等人在對地物的提取中利用LIBSVM進行選取[3]。該文基于前人的研究之上,就SVM參數的選擇進行了進一步研究。
1? SVM參數研究方法
該文使用了SVM對LiDAR數據中的強度信息進行了分類。在進行分類的過程中,采用了樣本交叉驗證和LIBSVM中的網格法兩種方法對SVM的參數進行了討論,通過精度的比較及分類結果的目視對比,對參數選取方法進行分析。技術流程如圖1所示。
1.1 數據預處理
先對LiDAR點云強度信息數據進行直方圖統計,根據直方圖去掉太高或者太低的噪聲。再選取末次回波作為地面觀測信息,進行柵格化。最后使用臨近填充的方法對數據空洞進行填補,得到強度信息圖像[4,5]。
1.2 使用不同參數獲取方法進行分類
利用分類樣本進行分類參數的選取:第一種,將分類樣本隨機分為兩等份,一份用于訓練分類器,一份用于檢驗分類器精度,利用遍歷法,步長為1,尋找分類精度最優的分類參數C(懲罰因子)。第二種,利用LIBSVM中的格網法進行尋找最優參數C。
1.3 對分類結果進行對比
使用樣本交叉驗證和格網法所得到參數C分別對本文強度信息進行分類,得出兩種方法的分類精度及分類圖像,通過精度與圖像的對比,進行對參數選取方法的評價。
2? 實驗與結果分析
為了更好地突出分類結果,實驗數據要求應簡潔明了,且易于區分,能提供較為明顯的地物作為分類提取的目標物。為了滿足實驗數據的要求,該文選擇了Open Topography Facility在Andrews Experimental Forest和Willamette National Forest地區的LiDAR點云數據。該數據區域面積為0.25km2,其中包含一條明顯的道路,在分類過程中只需將分類目標設置為道路,就能明顯觀察到分類結果的優劣。
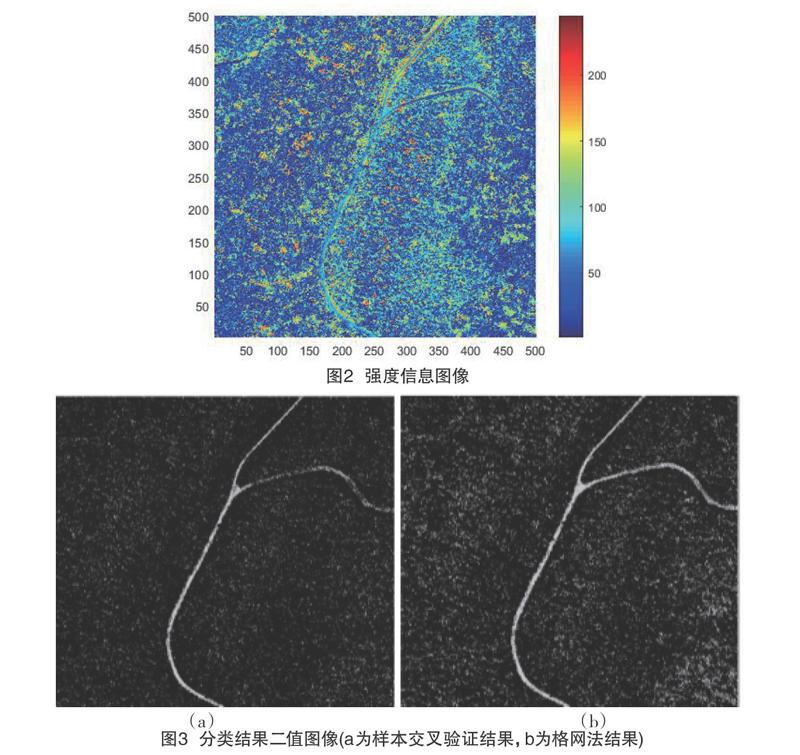
對點云數據進行預處理后,得到強度信息圖像,如圖2所示。
根據強度信息圖像與正射影像圖,選取了40個道路點與1050個非道路點作為分類的樣本信息。先對樣本信息進行樣本交叉驗證運算,得到最優分類參數C為55,分類器先驗精度(道路點被正確提取的精度)為82%,分類結果二值圖如圖3所示。再利用SVM中格網法進行參數C的選取,參數C結果為0.0039,分類精度為96%,分類結果二值圖如圖3所示。
由兩種分類方法的分類精度可知,格網法得出的參數C對樣本分類結果有較高的分類精度,從二值圖像上可以看得出,相比于a,b對道路信息的保留更多。但是b相對于a存在更多的噪聲,且噪聲面積較大,對后期的圖像處理帶來了麻煩。雖然a的道路信息不如b完善,但提取出了道路的大部分信息,體現了道路的主要結構與空間信息,且剩余噪聲多為小面積離散噪聲,方便進行后期處理。
經過試驗證明,在該文對LiDAR點云數據進行SVM分類的過程中,選擇樣本交叉驗證得出的參數C更適合對道路空間結構的提取,而格網法得出的參數C更能體現道路細節信息。在實際應用中,可綜合考慮對分類目的要求,選取適宜的參數獲取方式。
3? 結語
該文在對LiDAR點云數據的分類過程中對SVM參數C的選取進行了研究,利用了樣本交叉驗證與LIBSVM中的格網法兩種方法進行了試驗、比較。試驗表明,樣本交叉驗證得出的參數能較好地剔除非道路點,且能保留較完整的道路信息;格網法對道路點的提取精度高,但對噪聲的剔除能力較差。所以,在實際應用中對SVM參數的選擇,應針對應用要求及分類目標進行綜合考慮,選擇適宜的參數選取方法。同時,該研究仍存在一定的不足:實驗對應的分類類別過少;樣本數據較少,缺少大量對照組。希望后來的研究能豐富數據,更深入地研究分類過程中的參數選取方法。
參考文獻
[1] Song,M.Civco, D.Road extraction using SVM and image segmentation[J].Photogrammetric Engineering & Remote Sensing,2004(70):1365-1371.
[2] Azizi,Z.Najafi,A.Sadeghian,S.Forest Road Detection Using LiDAR Data[J].Journal of Forestry Research,2014(25):975-980.
[3] 喬紀綱,陳明輝,艾彬,等.SVM用于LiDAR數據的地物分類[J].測繪通報,2013(7):35-38,42.
[4] 胡澄宇,汪仁銀,張金花,等.一種基于機載LiDAR點云的林間道路提取方法[J].測繪工程,2017,26(12):60-63,75.
[5] 胡澄宇.基于機載LiDAR的林間道路提取方法研究[D].西南交通大學,2016.
