一種基于WebSocket協議的車聯網監控系統設計
2019-11-08 06:01:33狄振華
粘接 2019年9期
狄振華


摘要:目前,汽車保有量在不斷的提高,以此導致的交通道路車輛管理問題在不斷的提高,比如交通事故、偷車盜車及停車困難等。文章實現了基于WebSocket協議的車聯網監控系統,此系統為車聯網的分支研究方面,是集合現代通訊技術、衛星定位技術、地理信息技術及總線技術,并且將互聯網作為基礎的系統,能夠實現車輛狀態信息通過數據包到監控中心中傳輸,實現車輛監控。
關鍵詞:WebSocket協議;車聯網;監控系統
中圖分類號:TP311文獻標識碼:A 文章編號:1001-5922(2019)09-0113-04
汽車保有量不斷增加,汽車安全問題變得越來越重要,對于汽車主動安全監控方面的研究開始備受重視。隨著人工智能與工業技術的飛速發展,為解決車聯網及汽車主動安全監控等問題打下了良好基礎,促進了車聯網技術及主動安全監控技術的進一步發展。車聯網屬于物聯網應用到汽車領域的內容,指的是將獨立車輛作為基礎初始信息來源,通過車聯網及車載移動互聯網作為支撐,根據事先的選定的通信協議及數據交換標準,在車輛和車輛、道路及互聯網之間實現無線方式通訊及信息交換,以此實現交通及車輛等管理的控制,從而實現動態信息及服務的網絡化、一體化及智能化。以此表示,車聯網技術發展會使交通控制、汽車行駛等朝著智能化、網絡化及現代化的方向發展。所以,對車聯網監控系統的設計和分析具有重要的現實意義。
1車聯網監控系統的設計方案
文章基于WebSocket協議實現車聯網監控系統的設計,創建車聯網檢測系統。圖1為系統的結構,主要包括車載系統及監測系統兩方面。車載系統主要包括通信系統、顯示及操作系統及車載定位系統,主檢測系統主要包括監測及操作系統、通信系統。
車載系統通過車載GPS及北斗定位接收系統獲得車輛位置信息,并且將車輛位置信息和其他的信息利用無線通信網絡到監控臺中傳輸,監控臺實現全部車載系統在某時間中信息的整合,展現主檢測系統地圖調用界面,并且使部分信息到車聯網范圍中界面進行展現。此系統能夠使全部車輛預警信息及位置信息的共享在同個車聯網車載系統中。利用LabVIEW對檢測及顯示軟件進行編寫,從而有效實現車輛運行情況的實時共享及監控。
2車聯網監控系統的設計
2.1車載終端的設計
車載終端屬于分布式車載智能安防終端,主要目的就是實現運輸物流企業主動的安全監控。此儀器主要是分布在汽車上的各種傳感器、油箱主控機、貨箱探測器、方向盤探測器和遙控器構成。能夠利用無線、有線兩種方式實現數據傳輸,此儀器主要目的就是全車主動防盜警示、非正常駕駛預警、雙向主動限速、重大交通事故自動報警及救援和車輛運輸安全監管。儀器主要原理為:根據儀器中的GPS模塊、GPRS模塊、傳感器組及無線電模塊、嵌入式微處理器等,對得到的傳感信息及空間數據實現動態分析和計算,并且以儀器自身的算法實現安全狀態的自主判斷,以此能夠實現車輛主動安全防護及架空。儀器中的GPRS模塊能夠實現上位機無線數據通信聯系,最終利用GSM網絡以短信息的方式和指定手機相互練習,從而實現主動安全報警及監控。
2.2感知層的設計
感知層屬于數據源收集模塊結構,在感知層中能夠有效實現工程車輛數據收集,此數據主要包括工程車地理位置和速度,主要包括數據庫所收集的故障報警、現場數據等,在感知層安裝指定數據庫和儀表,將各種參數信息進行展現,數據主要指的是車輛運維記錄、保養維護及故障數據記錄等數據。在感知層模塊中添加滿足VPDN網絡傳輸的模塊,本文在前端系統控制設計過程中使用具備雙核處理器主從式雙處理器架構,此種架構模式在實現硬件設計過程中利用獨立構造模型。主處理器使用數據收集和無線遠程收集,通過處理器能夠保證抽取數據存儲、人機交互功能。其次,對于不同廠家及公司設計工程車,利用功能模塊獨立化之后,對處理器和通信協議的完整性進行保證,方便后期系統升級及維護。
在感知層設計過程中,通過DSP芯片實現主處理器,DSP芯片的數據運算能力比較高,在數據存儲過程中具有良好的性能。其中ADSO-BF548芯片的外設接口便于系統升級及擴展,此種芯片的性能比較高,而且在后期系統升級過程中還能夠將編碼新能充分展現出來。系統使用ARM實現從處理器工作,此芯片能夠實現高效編程及實時調試功能,能夠在工業系統控制中收集不同傳感器數據。處理器工作具備外圍電路支撐,此電路主要包括數據存儲、總線接口及電源支撐。ADSP能夠為外部數據來源提供擴展數據存儲空間,通過EBIU實現統一管理,芯片還使用信號線獨占方式實現DDR存儲管理。
2.3數據收集設計
此系統中車輛參數收集過程主要是利用OBD II標準協議實現開發,其主要的硬件核心為TL718芯片。此標準協議實現數據讀取的過程較為簡單,首先對TL718芯片實現換行格式、回顯格式等簡單幀格式的初始化設置,大部分都是利用默認值。在實現初始化之后,根據ISO文檔中的描述服務模式及參數號實現Request命令得到相應的Answer數據。針對不同Answer數據幀計算處理方式各不相同。
在獲得數據過程中,OBD II標準協議獲得數據的時候一切都具有完整規定文檔,其主要包括所有參數相應的數據字節數、數據字節計算折合方法和最終數值單位,從而使開發難度得到降低。圖2為數據收集流程。
2.4監控服務端通信
監控服務端通信主要包括SMS及GRPS兩部分的通信,其中的GPRS通信指的是利用socket套接字實現的,SMS通信指的是利用串口實現的。應用程序一般通過SOCkte對網絡發送數據請求,或者實現數據接受請求的相應。
Socket技術能夠為網絡程序進程并發通信問題的解決提供了良好途徑,套接字利用遠程端口及本地端口創建連接并且相互通信,所以此信息是socket網絡通信基礎。圖3為socket原理的結構。首先,服務端實現端口偵聽的開啟,如果偵聽到外界連接請求,從而能夠和發起請求客戶端創建連接。服務端在得到客戶端連接以后就能夠與客戶端實現數據傳輸。
在服務端開始實現端口偵聽的時候,首先通過客戶端實現TcpClient類型創建,然后能夠在tcpListener實例中實現AccepTCPCIient()方法得到和客戶端連接,其返回對象屬于client值。主要代碼為:
2.5車聯網安全監控系統互聯
根據車聯網構成元素實現的功能,劃分成為三個層次網絡互聯結構,信息感知層為最底層,實現數據收集和融合處理,網絡傳輸層為中間層,實現分布式終端信息利用互聯網的有向傳輸,應用層為最高層,也就是車聯網上位機系統,實現終端數據處理功能。
GPRS和Internet連接的設計模型:GPRS網絡結構構成指的是GSM基站中的GPRS網絡互聯,此設計系統的數據要利用移動通信調試解調器通過撥號方式,和當地GPRS業務節點實現無線通信的創建,并且進人到GPRS網絡中,之后利用GPRS網關和Inter-net相互連接,從而實現數據的交互。
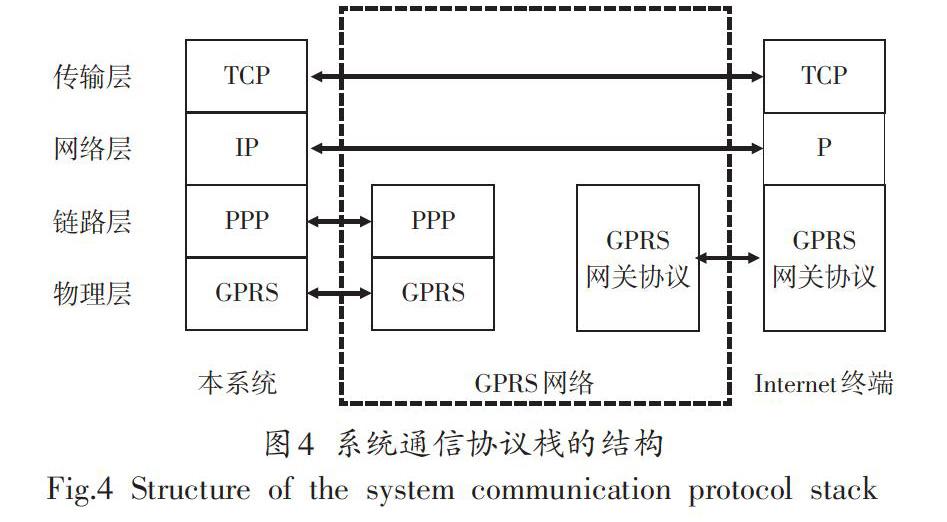
系統通信協議棧:此系統使用四層次通信協議棧結構,第一層為物理層,使用GPRS協議,ARM嵌人式微處理器通過AT指令,利用GPRS撥號方式創建系統中GPRS網絡和GPRSModem網絡物理通信,也就是GPRS信道。第二層為鏈路層,使用PPP協議。系統遠程登錄到Internet,并且得出GPRS網關所分配的IP地址,利用PPP協議使原始GPRS物理層連接改造成為無差錯數據鏈路。第三層為網絡層,利用IP協議方式,使接人Intemet中的終端相互聯系,此終端的IP地址不同,利用IP路由進行選擇和辨別,就能夠使系統和接人Internet中的每個IP終端數據流轉。第四層為傳輸層,也就是使用TCP協議方式為數據傳輸提高功能可靠及面向連接的服務。圖4為系統通信協議棧的結構。
2.6系統測試
在實現系統設計之后對系統進行測試,系統功能最終實現邊調試邊修改和完善的過程。在實驗測試的過程中主要包括SIM卡、車載終端、PC機、車載電源。在測試過程中,在三輛車中安裝系統,開啟監控客戶端軟件實現監控。通過測試,監控界面中能夠將其實時位置和車輛參數展現出來,在三輛車運行的過程中,圖標也會隨車移動。通過長時間測試表示,系統運行穩定,滿足實際需求。
3結語
設計基于webSocket協議的車聯網監控系統能夠感知車輛運行情況,對于網絡區域中的貨運車輛進行監控及管理,還能夠實現遠程車輛指揮、跟蹤定位、安全防盜及事故救援等。通過次系統,能夠降低交通事故、財產損失的幾率,使管理效率得到提高。以上的創新設計能夠在多種車輛中使用。