基于加速度傳感器的豬舍刮糞板運行狀態(tài)監(jiān)測裝置設(shè)計與仿真
2019-11-01 02:28:47胡振楠孫紅敏李曉明
農(nóng)業(yè)與技術(shù) 2019年17期
胡振楠 孫紅敏 李曉明
摘 要:豬舍刮糞板在運行過程中可能存在清理不徹底、糞道內(nèi)異物阻礙刮糞板運行、刮糞板損毀等工作人員難以監(jiān)測的問題,因此設(shè)計一種基于加速度傳感器的刮糞板運行狀態(tài)監(jiān)測裝置,并通過MATLAB進行仿真。通過MPU6050傳感器獲得當前狀態(tài)下刮糞板的姿態(tài)角,采集正常狀態(tài)下運行數(shù)據(jù)并運用中值濾波算法消除異常角度波動,由此確定閾值,根據(jù)不同角度閾值將刮糞板狀態(tài)不同故障類型和等級,通過判斷運行時刮糞板各與其對應(yīng)閾值的關(guān)系完成對故障的識別和警報。依據(jù)預定義的刮糞板運行狀態(tài)進行MATLAB仿真測試,獲得了96.1%的平均準確率。仿真實驗表明本裝置可用于實際作業(yè)狀態(tài)下對豬舍刮糞板狀態(tài)的監(jiān)測。
關(guān)鍵詞:豬舍刮糞板運行狀態(tài);MPU6050傳感器;故障檢測;中值濾波;MATLAB仿真
引言
隨著養(yǎng)豬產(chǎn)業(yè)化的興起,規(guī)模化養(yǎng)豬場越來越多,也越來越大,隨之帶來的是污糞的清理問題,當前,豬場常用的清糞方式包括水沖式清糞、水泡糞清糞、干清糞[1]。其中干清糞為主流清糞方式,干清糞模式是將動物的糞便和尿液在清理過程中進行分離,然后再進行集中堆放和轉(zhuǎn)運處理,通常有人工方式和機械方式2種,現(xiàn)代化豬場采用機械式刮糞板清糞系統(tǒng),其與其他清糞模式相比更有利于節(jié)省資源和保護環(huán)境[2]。然而,當前刮糞板式清糞仍存在一些不可忽視的問題,刮板在刮除糞污過程中可能存在運行異常,如刮板左右傾角過大而導致清理不徹底、糞道內(nèi)異物影響刮板前進等情況,異常運行狀態(tài)下會導致清理不徹底,嚴重時可能導致設(shè)備損毀,這是影響刮糞設(shè)備使用壽命的重要因素。本文旨在設(shè)計一種豬舍刮糞板狀態(tài)監(jiān)測裝置,可在工人無法觀測到的情況下準確識別故障,在刮糞設(shè)備運行過程中實時監(jiān)控設(shè)備是否處于正常工作狀態(tài),并可在故障發(fā)生時及時將信息反饋給工作人員,達到及時發(fā)現(xiàn)及時處理,能在工作人員觀察不到的地方發(fā)現(xiàn)故障并預警,排除潛在故障的可能、提高污糞清理設(shè)備的可靠性以及使用壽命。
1 材料與方法
1.1 實驗材料與硬件連接
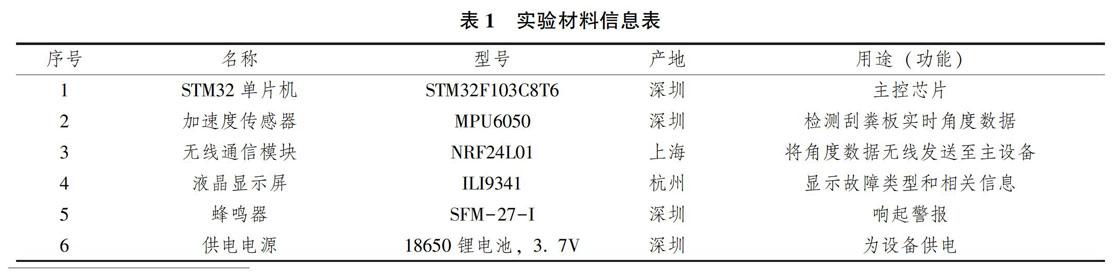
系統(tǒng)硬件設(shè)備分別由STM32單片機、加速度傳感器、無線通信模塊、液晶顯示屏、警報器、供電電源組成,其材料具體信息如表1所示。
主控芯片采用STM32F103,該芯片屬于中低端的32位ARM微控制器,是意法半導體(ST)公司出品,其內(nèi)核是Cortex—M3。芯片集成定時器,CAN,ADC,SPI,I2C,USB,UART,等多種功能[3]。
數(shù)據(jù)收發(fā)模塊為NEF24L01,NRF24L01是由 NORDIC 生產(chǎn)的工作在 2.4~2.5GHz 的 ISM頻段的單片無線收發(fā)器芯片, NRF24L01 采用 SPI 通信,可以實現(xiàn)點對點或是1對多的無線傳輸,通信速度最高可達到2Mbps。輸出功率頻道的選擇和協(xié)議的設(shè)置可以通過 SPI 接口設(shè)置,可以連接到大多數(shù)的單片機芯片,并完成無線數(shù)據(jù)傳送工作[4]。
加速度傳感器采用MPU6050型號, MPU6050加速度傳感器模塊集成了三軸陀螺儀傳感器和三軸加速度傳感器,分別用了3個 16 位的ADC[5],并有1個可擴展的數(shù)字處理器(DMP),可將其檢測到的模擬量轉(zhuǎn)化為數(shù)字量,MPU6050傳感器模塊可控制測量范圍,提取不同速度的運動參數(shù)。通過得到的加速度和角速度能計算出歐拉角,且STM32可通過IIC總線獲取傳感器的數(shù)據(jù)值,誤差小,精度高[6]。
液晶顯示屏采用帶有ILI9341芯片控制的液晶屏,故障發(fā)生時通過液晶屏顯示出故障類型和相關(guān)信息,該芯片核心部分是位于中間的 GRAM(Graphics RAM),即顯存[7]。GRAM 中每個存儲單元對應(yīng)液晶面板中的1個像素點,由自身其他模塊共同把 GRAM 存儲單元的數(shù)據(jù)轉(zhuǎn)化成液晶面板的控制信號,最終顯示程序設(shè)定的信息。
報警模塊通過簡單的蜂鳴器實現(xiàn),當單片機收檢測都存在故障時,控制 PNP 型三極管導通[8],使蜂鳴器發(fā)聲報警。
供電電源選擇為鋰電池供電方式,電源模塊為2組2節(jié)串聯(lián)的鋰電池,分別為主從設(shè)備供電,2節(jié)鋰電池串聯(lián)提供7.4V電源經(jīng)L298N升壓到12V,再經(jīng)其轉(zhuǎn)換輸出電壓為3.3V為設(shè)備中各模塊供電。
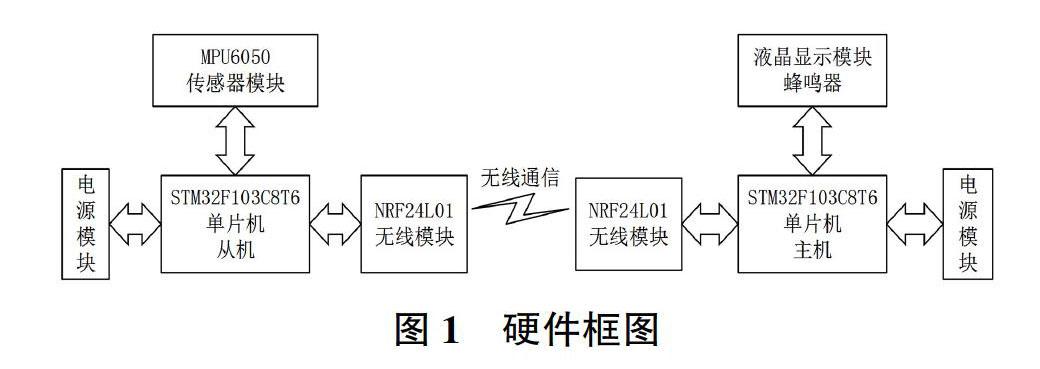
豬舍刮糞板狀態(tài)監(jiān)測裝置硬件框圖如圖1所示。
1.2 實驗設(shè)計
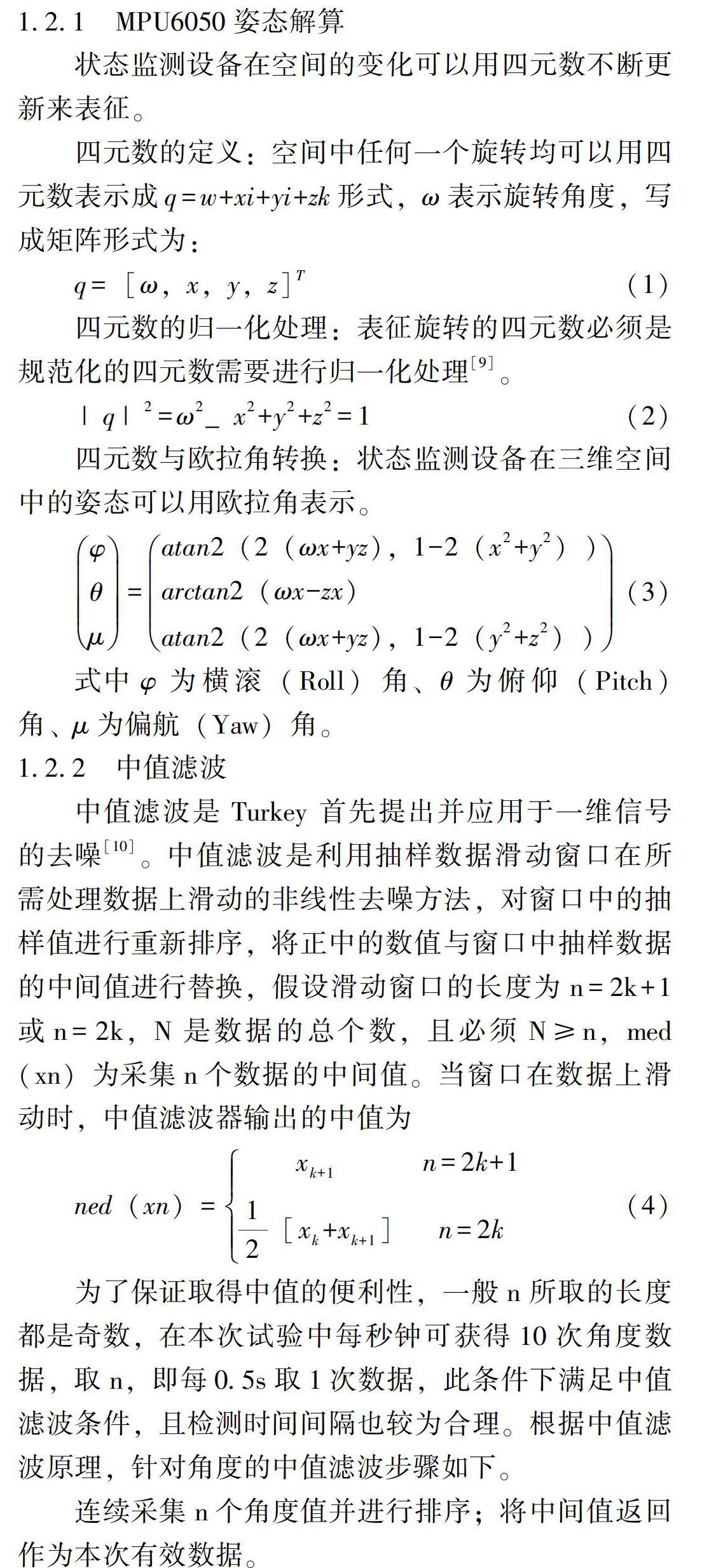
基于上述硬件系統(tǒng),通過對MPU6050采集的數(shù)據(jù)進行姿態(tài)解算獲得刮糞板運行的實時角度數(shù)據(jù),利用中值濾波算法進行數(shù)據(jù)處理,獲得較為合理的閾值,在此閾值的基礎(chǔ)上,對故障進行分類劃級,驗證本裝置在應(yīng)用中值濾波算法的基礎(chǔ)上對故障類型識別的可靠性。
為了保證取得中值的便利性,一般n所取的長度都是奇數(shù),在本次試驗中每秒鐘可獲得10次角度數(shù)據(jù),取n,即每0.5s取1次數(shù)據(jù),此條件下滿足中值濾波條件,且檢測時間間隔也較為合理。根據(jù)中值濾波原理,針對角度的中值濾波步驟如下。
連續(xù)采集n個角度值并進行排序;將中間值返回作為本次有效數(shù)據(jù)。
中值濾波的優(yōu)點在于通過中值濾波得到的數(shù)據(jù)總是可以在輸入的原始角度數(shù)據(jù)中找到,不增加新的數(shù)據(jù),保證了數(shù)據(jù)分析的準確性。
角度檢測的過程中存在偶然因素引起的短時間內(nèi)角度巨幅波動,對閾值的選取可能帶來巨大誤差,中值濾波方法能有效排除這種由偶然因素產(chǎn)生的波動,最終使閾值貼近真實數(shù)據(jù)。
下圖為通過中值濾波處理過的數(shù)據(jù)與原始數(shù)據(jù)的對比圖,如圖2所示。
原始數(shù)據(jù)在4.5~5s、5~5.5s、7.5s出現(xiàn)巨幅波動,這種情況由偶然因素引起,濾波后使得角度值更貼近真實值,使用中值濾波的作用在于使得閾值確定更為真實、合理、準確,以免閾值取得過高,在故障發(fā)生時不能有效的予以檢測警報。
1.2.3 確定閾值
閾值的確定是故障檢測的前提,基于MPU6050姿態(tài)解算獲取的實時角度數(shù)據(jù)和中值濾波處理,可以獲取一組正常運行狀態(tài)的橫滾角(R)、俯仰角(P)、偏航角(Y)的波動范圍,正常運行狀態(tài)下R、P、Y均在±5°內(nèi)波動。正常運行狀態(tài)下的3個角度的數(shù)據(jù)20組,取每組R、P、Y波動的最大范圍作為每組的閾值,最后取各角平均閾值作為最終閾值,其中橫滾角的閾值為HR=±4.9°、俯仰角的閾值為HP=±4.7°、偏航角的閾值為HY=±4.9°。
以橫滾角為例,正常與故障狀態(tài)下橫滾角變化的情況如圖3。
在運行過程中,橫滾角在4~5.5s、6.5~7.5s間出現(xiàn)正向傾斜,其傾角超過閾值,在5.5~6.5s角出現(xiàn)反向傾斜,其傾角超過閾值,此種情況應(yīng)發(fā)出警報。
2 系統(tǒng)仿真與結(jié)果
在本次實驗中,研究對象為刮糞板,參數(shù)為該刮糞板運行時的橫滾角(R),俯仰角(P),和偏航角(Y),對于每個角度都對其設(shè)置了相應(yīng)的閾值,分別為HR、HP、HY,超過閾值范圍則處于異常狀態(tài),由此,不同的角度組合出來的故障類型也各不相同,為了在發(fā)出警報時能反饋準確的故障信息,將故障進行分類劃級,詳細如表2。
不同的角度異常引起的故障也各不相同,嚴重程度也不相同,對此,將故障細分為7種類型3個等級,其中污糞清理不徹底為第3等級,糞道下由異物阻礙刮糞板運行為第2級,出現(xiàn)嚴重故障為第1級別,針對不同等級故障予以不同類型的警報方式。
對應(yīng)上表不同運行狀態(tài)下各角的波動如圖4所示。
根據(jù)上述存在的各類運行狀態(tài),我們?yōu)闄z測設(shè)備設(shè)計故障分類器,輸入當前狀態(tài)下各角度值,經(jīng)分類5所示。
本系統(tǒng)包含主從設(shè)備,其中從設(shè)備負責采集傳感器信息并通過姿態(tài)解算獲得當前狀態(tài)下的角度值,將數(shù)據(jù)發(fā)送至主設(shè)備,主設(shè)備經(jīng)初始化后設(shè)置各角閾值,然后不斷接收數(shù)據(jù),經(jīng)中值濾波器處理獲得較為準確的角度值,再經(jīng)故障分類器進行故障分類,對不同類型故障類型給出不同處理方式,如果是1級故障則立即響起警報,如是其他類型故障則記錄相應(yīng)故障類型和故障位置,待運行結(jié)束后將故障信息通過液晶屏反饋給工作人員,在刮糞板運行過程中,實時角度都會對應(yīng)一個時間t,由此通過設(shè)定電機的轉(zhuǎn)速來確定刮糞板的運行速度v,當故障發(fā)生時,通過s=vt 得知刮糞板出現(xiàn)故障的位置距離s,整個監(jiān)測系統(tǒng)流程圖如圖6所示。
通過實驗模擬表2中的8種刮糞板運行狀態(tài),針對每種運行狀態(tài)采集100組角度數(shù)據(jù),應(yīng)用前文所確定的各角度閾值,利用得到的數(shù)據(jù)進行MATLAB仿真,仿真結(jié)果如表3所示,其中W1~W8對應(yīng)8種狀態(tài)的測試組,W1~W8分別代表正常、故障1至故障7,G1~G8代表8種狀態(tài)的結(jié)果組,G1~G8分別代表正常、故障1至故障7。本次仿真實驗的平均準確率為96.1%。
3 討論與分析
基于仿真結(jié)果,正常狀態(tài)下的測試組檢測為正常的準確率為100%,表明在在實際作業(yè)狀態(tài)下的刮糞板不會將正常狀態(tài)誤報為故障,在W2、W3、W5分別為單個角度故障類型,在此種狀態(tài)下,有96.7%的準確率,有3.3%的概率誤將故障檢測為正常,此種狀態(tài)為3級故障,不影響使用,W4、W6、W7為2級故障狀態(tài)下有94.3%準確率,其1%的概率檢測為正常,4.7%檢測為3級故障,W8狀態(tài)下為99%能檢測到該類故障,其中僅有1%檢測為2級故障,在實際作業(yè)中,該準確率可以滿足作業(yè)要求。但是在此結(jié)果中我們發(fā)現(xiàn),在測試組G4和G6組,在誤報的幾種類型中,誤報為W3類型較少分別各1例,說明在俯仰角相對于橫滾角和偏航角更不易檢測出來,俯仰角對應(yīng)的閾值設(shè)置偏高,為進一步提高準確率,應(yīng)合理降低該角對應(yīng)的閾值。
4 結(jié)論
本文通過對刮板式刮糞板運行狀態(tài)的研究,對不同的故障狀態(tài)和危害程度予以分類劃級,根據(jù)不同角度的閾值設(shè)計出針對不同故障的檢測裝置,獲得了較高的準確率。隨著我國養(yǎng)豬產(chǎn)業(yè)逐步過渡為規(guī)模化養(yǎng)殖,大量的清糞設(shè)備成為豬場的必需,本裝置能對刮糞板的運行進行狀態(tài)監(jiān)測并能對不同故障予以不同程度的警報,對于清糞設(shè)備的維護和使用具有重要意義。本裝置在準確率方面還有提升空間,需要在后續(xù)的研究中設(shè)計更加準確且合理的閾值確定方法。
參考文獻
[1] 吳志娟,李文剛,焦福林,等.規(guī)模化豬場的糞便處理與利用[J].畜禽業(yè),2017,28(6):46-48.
[2] 賈立松,韓華,魏傳祺,等. 刮糞板清糞系統(tǒng)在現(xiàn)代化豬場的應(yīng)用[J].當代畜牧,2017(2):53-55.
[3] 梁龍兵,李楊,顧玲玲,等.基于STM32F103的健身裝置的設(shè)計[J].電子世界,2018(8):167-169.
[4] 張春艷,蔣 鵬.基于STM32F103控制的NRF24L01多路無線通信設(shè)計[J].現(xiàn)代工業(yè)經(jīng)濟和信息化,2017,7(12):97-98.
[5] 王 亮,沈俊杰. 基于兩輪自平衡車的姿態(tài)數(shù)據(jù)處理[J].工業(yè)控制計算機,2018,31(11):11-13.
[6] 陳才,張弘,羅蓉,等.基于MPU6050傳感器的踝足矯形器設(shè)計[J].現(xiàn)代計算機(專業(yè)版),2018(10):65-68.
[7] 張興武,趙慶志,張林華,等.基于STM32F103的嵌入式圖像采集系統(tǒng)[J].山東理工大學學報(自然科學報),2018(5):23-26.
[8] 常浩,王金江,朱亞培,等.基于STM32F103C8T6的多功能盆栽自動澆水裝置的設(shè)計[J].科技經(jīng)濟導刊,2018,26(28):11-13.
[9] 張平,劉祚時.基于慣性傳感器MPU6050的手勢識別方法[J].傳感器與微系統(tǒng),2018,37(01):46-53.
[10] 龔夢龍.中值濾波結(jié)合小波變換在光譜去噪中的應(yīng)用[J].科技與創(chuàng)新,2018(12):152-154.
