基于超聲波測距的模擬自動跟車系統設計
2019-10-31 07:00:03李亞蘭
電腦知識與技術 2019年22期
李亞蘭
摘要:隨著ADAS技術研究的深入,自動跟車系統的設計成為研究的重點,而跟車過程中,跟車距離的實時調整性成為技術的難點。本文采用超聲波測距和程序PWM調整的方法實現跟車行進中的實時性。系統通過超聲波傳感器測量距離,L298N為電機驅動模塊,以單片機為控制器,實現跟車的速度和距離的精確控制,同時用LCD1602顯示當前的距離值。
關鍵詞:ADAS;自動跟車;超聲波測距
中圖分類號:TP311? ? ? 文獻標識碼:A
文章編號:1009-3044(2019)22-0244-02
開放科學(資源服務)標識碼(OSID):
隨著交通運輸業的發展,交通安全問題日益嚴重,將智能控制技術引入車載系統成為降低交通事故的一種重要手段,因此,汽車先進輔助駕駛系統[1]成為全球汽車電子研究的熱點,自動跟車技術則為該輔助駕駛系統的主要部分,由于超聲測距是一種非接觸檢測技術,不受光線、霧霾以及被測對象顏色等因素的影響,在較惡劣的環境下具有很強的適應能力,因此文中的自動跟車設計采用超聲波傳感器測距,再通過所測距離自動調整與前車的距離和跟車的速度,形成一種閉環式的自動控制系統,達到不撞車、不丟車的跟車狀態。
1系統方案框圖
系統總體框圖如圖1所示,系統由MCU、L298N電機驅動、HC-SR04超聲波傳感器、LCD1602顯示屏、電源電路組成。超聲波傳感檢測本車與前車的實時距離,本文采用兩個超聲波模塊,分別放在小車的左前方和右前方;MCU發出測距指令、接受距離數據并進行數據處理,將測量結果轉換為PWM值輸出給電機驅動單元電路L298N,通過控制電動機的轉速達到控制小車加速、減速、轉向,并保持與前車的適當距離。LCD1602用于顯示小車的行進狀態參數。
2 超聲波測距算法
本文采用時間差測距法,即超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。
假設超聲波在空氣中的傳播速度為340m/s,定時器記錄的時間為T,發射點距障礙物的距離為S,則:
在設計中,采用兩個超聲波傳感器分別放在小車的左前方和右前方,若兩個超聲波檢測的距離一樣,即兩個超聲波的差值為0,就代表前面的小車是在直線行駛,若兩個超聲波的差值不為0,就代表前面的小車在進行轉彎,根據兩個超聲波之間檢測距離較小的值為依據,可以判斷前方小車的轉彎方向。
3 系統硬件設計
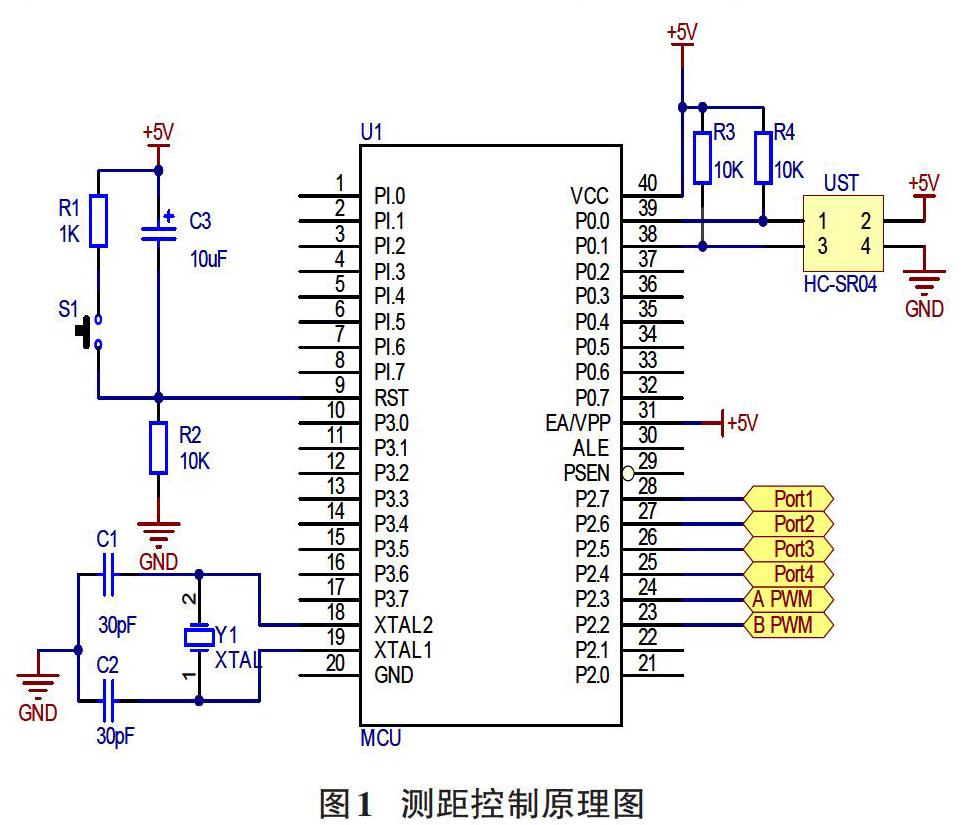
3.1測距單元電路設計
HC-SR04超聲波傳感器測距范圍為2cm-400cm,測距精度3mm。該傳感器共四個引腳,分別為,電源、地、TRIG、ECHO;給TRIG端10us的高電平信號,模塊自動發送頻率為40KHZ的8個脈沖,傳感器自動檢測是否有信號返回,通過ECHO端產生輸出指示信號,如果有收到返回信號則可輸出一個高電平給單片機,高電平持續的時間就是超聲波發射到返回的時間。
上圖中,R1,C3,R2構成單片機高電平復位電路,C1,C2,Y1構成單片機時鐘電路,HC-SR04第一腳為超聲波傳感器的TRIG信號,第三腳為超聲波傳感器的ECHO信號,在小車行進中,MCU通過P0.0輸出10微秒的高電平,HC-SR04發出8個脈沖,當傳感器收到返回的超聲波時,P0.1為高電平,通過定時器得到高電平對應的時間便可計算出所測距離值。
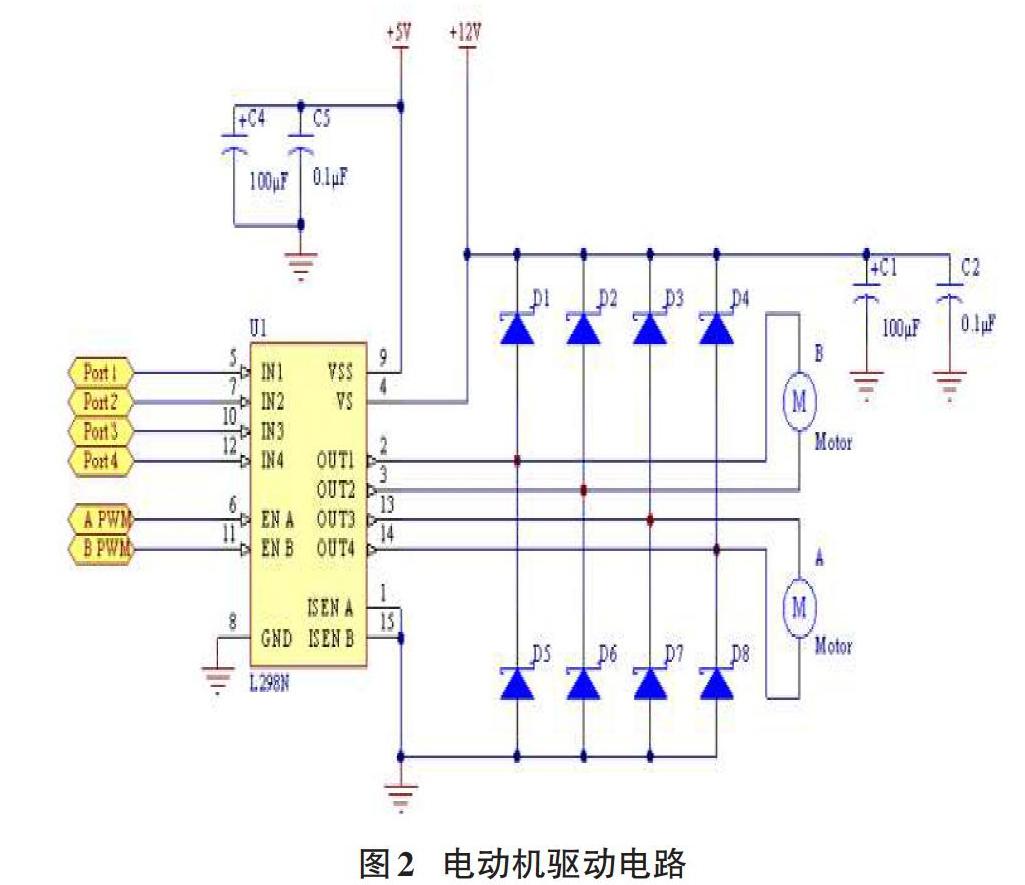
3.2驅動電路子系統電路設計
文中采用了兩個L298N芯片,分別控制小車兩邊的車輪電動機的驅動。L298N為雙H橋驅動芯片,驅動電流最大2A,提供最大功率20W,提供4路輸入信號,兩個使能端支持PWM調速,可以方便地控制直流電機速度和方向。
上圖中,電動機的驅動電壓為直流12V,IN1-IN4接單片機I/O口,高低電平分別對應OUT1-OUT4高低電平; OUT1,OUT2接電動機B,OUT3,OUT4接電動機A,OUT1和OUT2之間有電壓差即一個為高一個為低,電動機才轉動,OUT3,OUT4同理;通過控制IN1、IN2的極性可以實現電動機B的正反轉、停止狀態,從而實現車輪的前進、后退、停止動作;控制IN3、IN4的極性可以實現電動機A相應的狀態。
ENA和ENB分別連接來自MCU的PWM信號,當PWM占空比高時,則L298輸出的平均電壓高,電動機轉速則增高,反之則降低。
4 系統軟件設計
主程序主要完成系統初始化、跟車開始以及跟車過程中各子流程的調用;整個程序包含六個子程序,分別為顯示子程序,超聲波測距子程序,距離計算及前車狀態判斷子程序,跟車距離在設定的范圍內調整子程序,跟車距離在設定的范圍外調整子程序;如果與前車的距離在設定的范圍內則只需要通過PWM調整與前車的跟車方向,如果在范圍外則需要通過時調整與小車的方向和速度,圖中給出了如果距離在跟車范圍內的調整子程序流程。
5 結束語
本文設計并實現了基于超聲波測距的小車跟車系統,在后車與前車方向角度小于30度時能實現15厘米到10米范圍的自動跟車,但在彎道跟車時,如果保持3米/秒的速度,小車最多能實現45度彎度的自動跟車,如果要提高跟車的準確性,不丟車、不撞車,則可以對超聲波收發窗口進行機構的重新設計和處理,如增寬測量角度,或采用超聲波傳感器陣列[3]同時測量,優化軟件前后車方向判斷算法等。文中所設計的模擬自動跟車系統能較好地應用于ADAS系統中。
參考文獻:
[1] 張志強.ADAS的發展歷程及趨勢[J].內燃機配件,2019.
[2] 徐江海.單片機應用技術[M].北京: 機械工業出版社,2011.
[3] 辛喆,鄒若冰,李升波,俞佳瑩,戴一凡,陳海亮.基于超聲波傳感器陣列的車輛周圍目標物識別[J].清華大學學報(自然科學版),2017(12).
【通聯編輯:光文玲】
