利用自制杠桿平衡儀探究杠桿的平衡條件
2019-10-30 08:02:20劉信生邢海根
物理實驗 2019年10期
劉信生,邢海根
(1.龍橋鎮初級中學,安徽 廬江 231555;2.廬江第四中學,安徽 廬江 231500)
在探究杠桿平衡條件實驗中,調節杠桿在水平位置平衡,得出實驗結論是杠桿平衡中的最簡單的最常見的特例,教材只安排這一最簡單的探究,目的是降低探究的難度,讓學生在分組實驗中更容易操作,更容易得出結論. 但這種做法沒有考慮到學生可能得出特殊結論,如“動力乘以支點到動力作用點的距離等于阻力乘以支點到阻力作用點的距離”. 另外,往往使學生形成思維誤區,如杠桿必須在水平位置平衡. 所以教學中教師不能停留在只探究杠桿在水平位置平衡的層面,應該讓學生探究非水平位置以及力與杠桿不垂直等情況下的杠桿平衡條件,做到探究與再探究,甚至是多個力作用下的杠桿平衡.
1 杠桿的重心在經過支點的豎直線,對實驗沒有影響
組裝好杠桿,調節杠桿兩端的平衡螺母使杠桿在水平位置平衡,杠桿處于靜止狀態,根據二力平衡原理得出杠桿的支持力和其自身的重力在同一條豎直線上,因此杠桿的重心一定在支點所在的豎直線上,如圖1所示. 這時杠桿自重的力臂為0,可以避免杠桿的自重對實驗的影響. 若采用兩邊掛鉤碼,使杠桿仍在水平位置平衡,這時動力與阻力的力臂都落在杠桿上,可方便測力臂.
杠桿在與水平線任意角度的位置靜止,這時杠桿仍受平衡力的作用,杠桿的重心必定在支點的正下方,如圖2所示,其力臂仍然為0. 所以,杠桿自重對實驗仍無影響. 但此時,若采用兩邊掛鉤碼,使杠桿仍在原來位置平衡,這時動力與阻力的力臂都不在杠桿上,不方便測力臂.
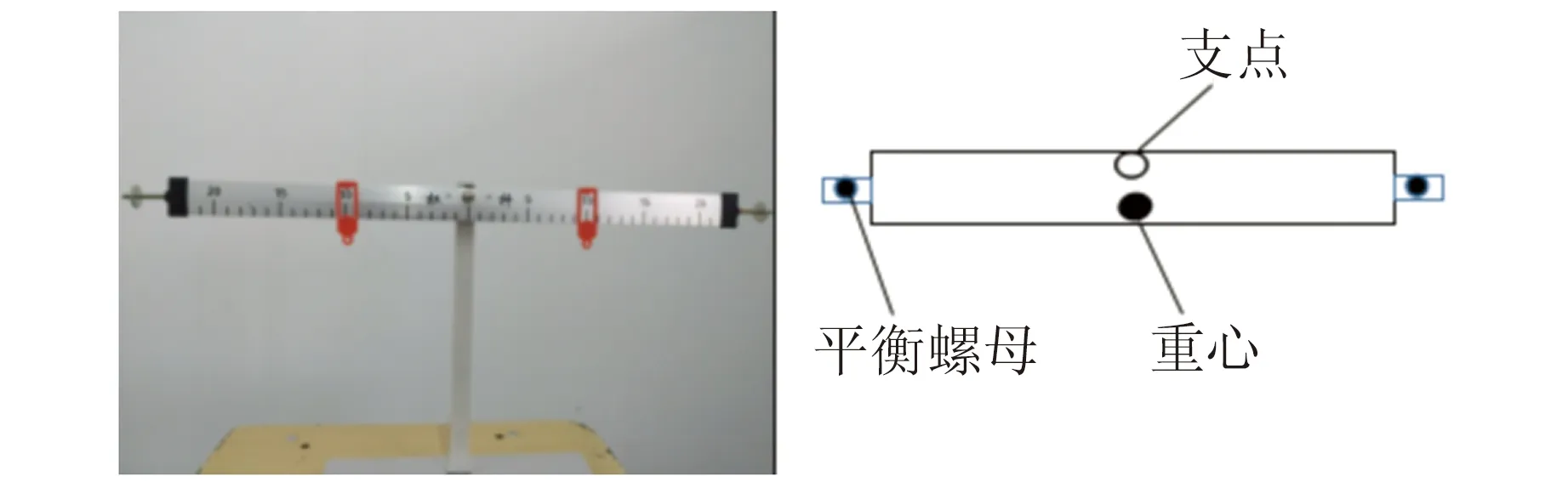
圖1 杠桿水平平衡
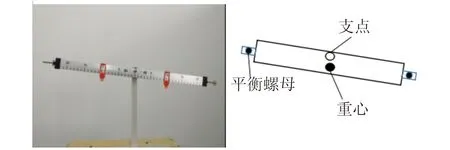
圖2 杠桿傾斜平衡
針對以上問題制作了力臂測量儀,探究了杠桿的平衡.
2 自制杠桿平衡儀,測任意角度力的力臂
自制的杠桿平衡儀如圖3所示,主體結構為不銹鋼毫米刻度尺6把(量程30 cm)、演示杠桿、測力計(0~5 N)、免漆板、重垂線等. 輔助結構為激光十字儀、光具座、充電寶、伸縮天線桿,如圖4所示.
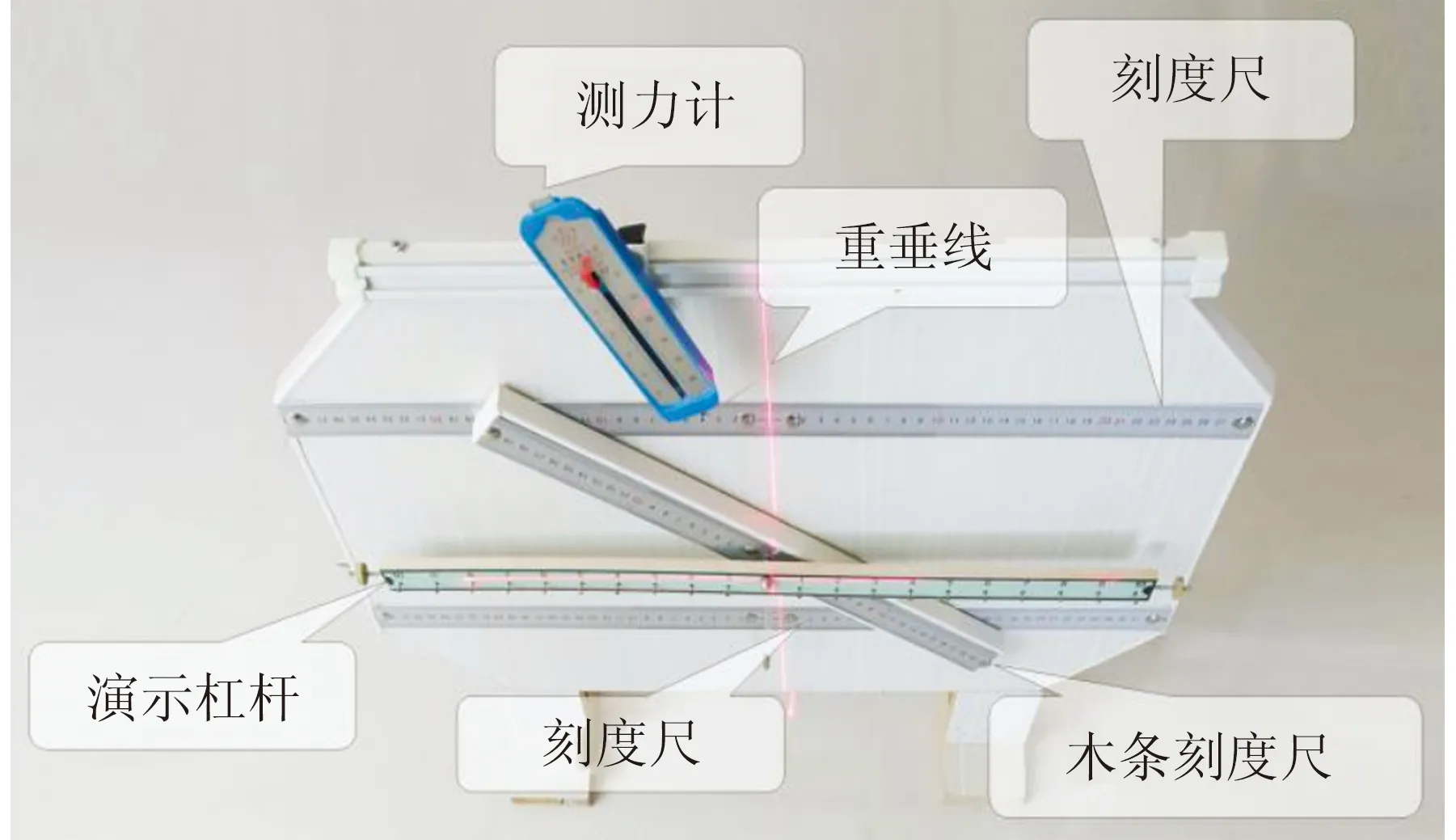
圖3 自制杠桿平衡儀
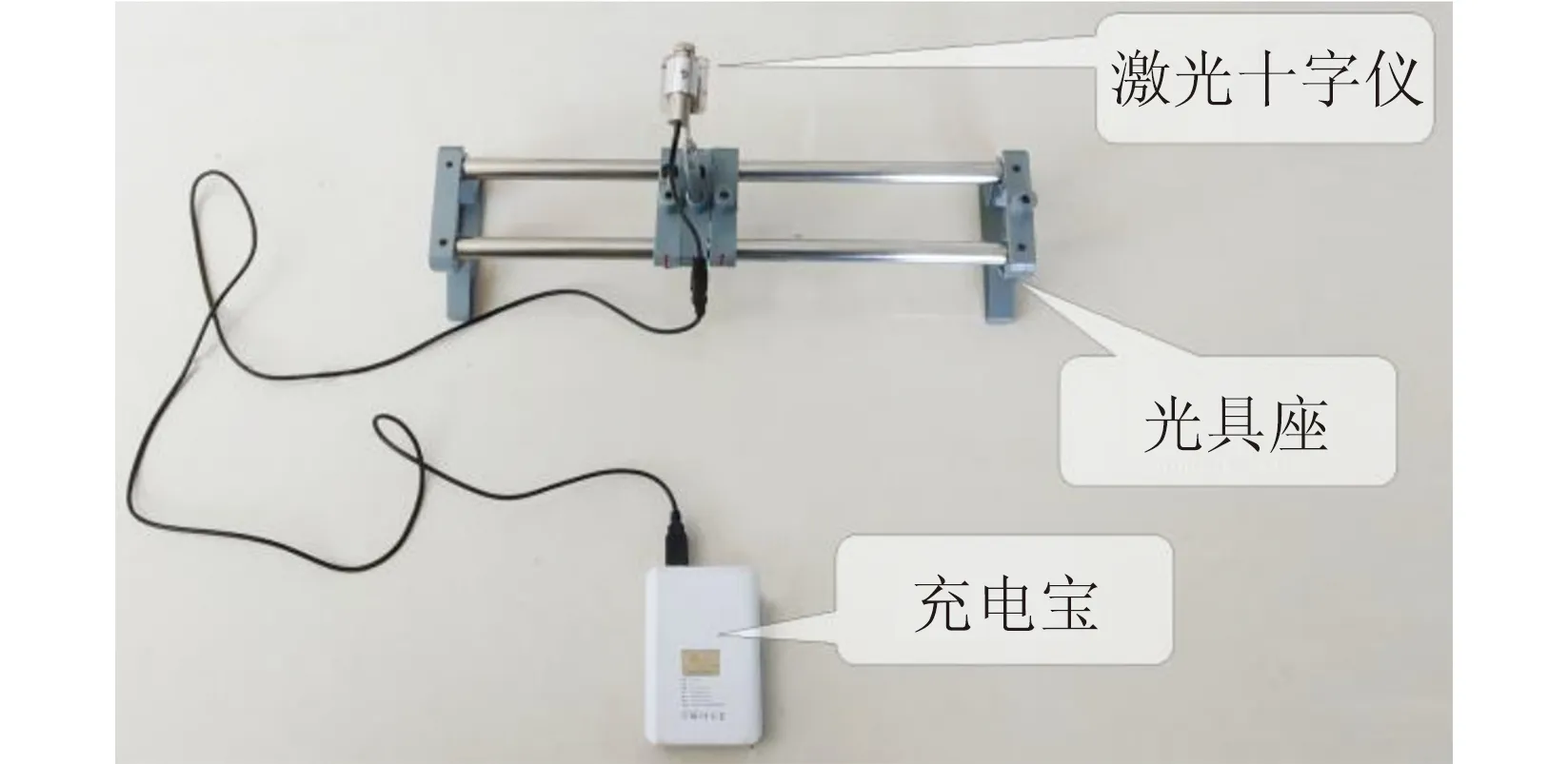
圖4 輔助結構
器材組裝:
1)在免漆木工板的中心固定軸上安裝長木條,表面嵌有2把不銹鋼刻度尺,使2把尺子的零刻度線與轉軸位置重合.
2)在相同的轉軸上,長木條前方再安裝演示杠桿,使其自由轉動,轉軸下懸掛小重錘.
3)在免漆木工板上方安裝窗簾滑道,滑道內有1塊金屬滑塊,滑塊可以在窗簾滑道左右移動,在滑塊前后方向開1個小孔,插入帶有螺帽的細螺絲釘,螺絲釘的釘帽前段焊接微型萬向轉軸,再在前端用強力膠粘上測力計的后蓋,使測力計整體可以在豎直平面內自由轉動,也可以調節螺絲釘,使其前后移動,使測力計和演示杠桿在同一平面內,保證測力計正確測量.
4)在演示杠桿上、下2行位置均固定相互平行的2把不銹鋼毫米刻度尺,這6把鋼尺的零刻度線在豎直位置均對齊(鋼尺的零刻度線以外的空白部已打磨掉).
5)在光具座支架上固定可收縮天線,在天線桿頂端固定紅外激光十字儀,打開激光十字儀,發出2條相互垂直的激光,從正面照射在免漆木工板上,上下、左右調節光具座上的激光十字儀,使一條光線與力的作用線重合,另一條光線經過杠桿的支點,這時支點到力的作用線之間的激光束的線段長即力臂的長度,轉動鋼尺,使鋼尺的邊緣與激光線平行,即可利用鋼尺測出力臂的大小.
3 杠桿平衡的探究與再探究
3.1 探究動力、阻力與杠桿垂直,杠桿在水平位置平衡的條件
1)上下移動激光十字儀,使十字交點正對杠桿支點,一條光線與重垂線重合,這時另一條光線處于水平位置,調節杠桿兩端的螺母,使杠桿在不掛鉤碼時與水平光線重合,這時杠桿便在水平位置平衡.
2)在杠桿兩端掛上不同數量的鉤碼,移動鉤碼的位置,使杠桿再次在水平位置平衡,如圖5所示. 這時杠桿兩端受到的動力或阻力大小等于所掛鉤碼的重力.
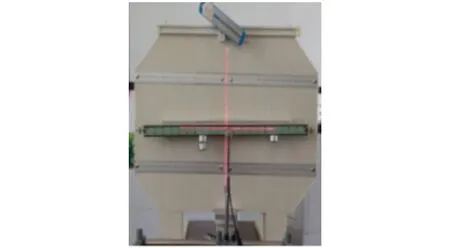
圖5 杠桿水平平衡
3)支點右邊的鉤碼對杠桿的拉力為動力F1,右側懸掛點到支點的距離為動力臂L1;支點左邊的鉤碼對杠桿的拉力為阻力F2,左側懸掛點到支點的距離為阻力臂L2,記錄測量數據.
4)改變力和力臂的大小,再重復實驗.
3.2 探究動力與杠桿不垂直,杠桿在水平位置平衡的條件
1)重復3.1中的第1)步操作.
2)在杠桿支點任意一邊加掛鉤碼,用彈簧測力計豎直或者傾斜施力拉住杠桿使其在水平位置再次平衡,如圖6所示.

圖6 動力與杠桿不垂直時杠桿水平平衡
3)在光具座上左右移動安裝有紅外線激光十字儀的伸縮天線桿,同時將天線桿向下伸縮,同時旋轉紅處激光十字儀,使十字形的激光束分別通過支點與拉力的作用線,找到拉力的力臂位置. 轉動木條刻度尺測出動力臂L1,讀出測力計拉力讀數F1,算出鉤碼的總重F2,讀出對應的力臂L2,記錄數據.
3.3 探究動力、阻力與杠桿不垂直,杠桿在非水平位置的平衡條件
1)任意旋轉杠桿的平衡螺母,使杠桿不在水平位置靜止,然后轉動杠桿后面的長木條刻度尺使其與杠桿重合(以正視時看不到木條尺為準),確定杠桿不掛鉤碼靜止時的位置.
2)在演示杠桿的一端加掛鉤碼若干個,再用彈簧測力計掛鉤拉住杠桿,在滑道內左右移動測力計的懸掛滑塊,再次讓杠桿與后面的長木條尺重合,如圖7所示,讀出測力計示數F1,算出鉤碼總重F2.

圖7 動力及阻力與杠桿不垂直時杠桿在非水平位置平衡
3)再次移動紅外激光十字儀,并轉動紅外激光十字儀,使其一條光與測力計拉力的細線重合,另一條光線過杠桿的支點,顯示出力臂的位置,轉動長木條尺,使其與力臂位置重合,讀出拉力的力臂L1,再次移動紅外十字激光儀,測出鉤碼對杠桿拉力的力臂L2,記錄數據.
4)整理數據,分析歸納結論.
3.4 數據整理與分析
在不同條件下進行實驗,收集和整理實驗數據如表1所示. 由表1可知在誤差允許的范圍內能很快得出杠桿的平衡條件. 可見無論杠桿在水平位置平衡還是在傾斜位置平衡,動力或阻力垂直于杠桿還是動力或阻力與杠桿不垂直,杠桿的平衡條件都是相同的.
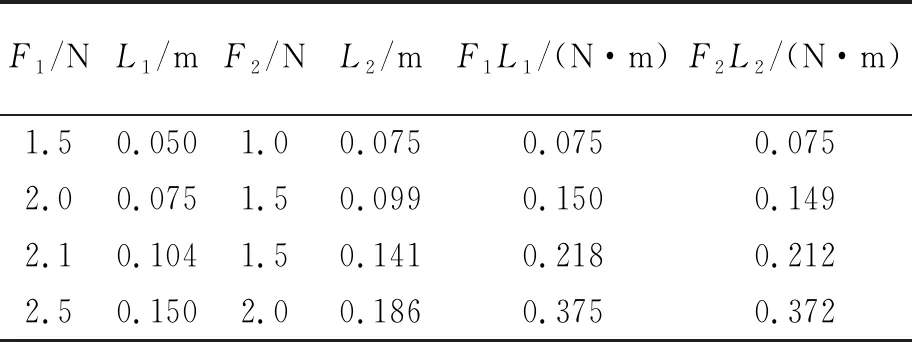
表1 實驗數據的收集和整理
當動力或阻力與杠桿不垂直時,還可直接在演示杠桿上讀出“支點到動力作用點的距離”與“支點到阻力作用點的距離”,將這2個數據代入“動力×支點到動力作用點的距離”及“阻力×支點到阻力作用點的距離”,便可發現兩者不相等. 但動力與阻力都與杠桿垂直時,兩者相等. 說明動力與阻力都與杠桿垂直時,不僅能得出杠桿平衡條件,還能得出以上的特殊結論.
4 結束語
該設計實驗可使學生認識到只要杠杠自身重力的力臂大小為0,杠桿處于任意位置靜止時,都可探究出杠桿平衡條件. 當杠桿自身重力的力臂為0,實驗時將杠桿調到水平位置平衡,避免杠桿自身重力對實驗的影響,便于從杠桿上直接讀出力臂的大小,但杠桿不是必須要在水平位置平衡.
猜你喜歡
中學生數理化·七年級數學人教版(2022年5期)2022-06-05 07:51:48
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
中等數學(2021年11期)2021-02-12 05:11:46
火花(2019年12期)2019-12-26 01:00:28
今日農業(2019年14期)2019-09-18 01:21:42
人大建設(2019年12期)2019-05-21 02:55:32
快樂語文(2018年13期)2018-06-11 01:18:16
中等數學(2018年11期)2018-02-16 07:47:42
學苑創造·A版(2015年11期)2016-01-14 09:03:27
中國中醫藥現代遠程教育(2014年13期)2014-03-01 04:26:39