汽車發動機電子節氣門總體結構及其智能控制系統設計
2019-10-23 03:20:28張黎黎
微型電腦應用 2019年10期
張黎黎
(煙臺汽車工程職業學院 汽車工程系, 煙臺 265500)
0 引言
隨著人們對汽車功能及性能需求的逐漸提升,以及汽車電子技術的快速發展,對汽車發動機性能的要求也隨之提高,現代汽車控制技術以降低加減速響應時間、及提升汽車舒適性等為目標,然而在提高加減速快速響應性能的同時會加劇整車加減速瞬時震蕩程度,如何有效解決這一矛盾問題具有較大的現實意義及研究價值。作為汽車發動機的核心組成部分,電子節氣門需對汽車發動機的空氣進入做到精確控制,汽車發動的變速調節受到其控制性能優劣的影響[1]。
1 汽車發動機電子節氣門控制系統設計
控制效果取決于控制程序的結構及算法的設計,在控制過程需提高采樣頻率、加快運算速度以提高響應性;確保采樣信號的準確可靠并降低干擾以提高穩定性;通過閉環控制及控制結果的反饋以提高控制的精確性。系統總體結構如圖1 所示。
節氣門開度信息由節氣門位置傳感器負責采集,智能控制器對采集到的信息進行運算處理,完成節氣門開度狀態的判斷并據此作出控制決策,執行機構的驅動則根據其發出控制指令完成。加速踏板的位置信號代表駕駛員對發動機的轉矩需求,需將其轉換為電壓信號后輸入電控單元,以加速踏板位置及其改變速度為依據,同時結合底盤電子控制信號及其它傳感器信號(如進氣量、轉速、節氣門轉角等),ECU通過計算后確定節氣門的開度,并發出指令實現電機輸出力矩的控制,節氣門在電機輸出與復位彈簧二者間力矩平衡時穩定在目標開度,驅動信號占空比增大時,節氣門開度增加;當占空比減小時,節氣門開度減小。位置傳感器將節氣門位置信息反饋給ECU從而實現閉環控制[2]。

圖1 電子節氣門智能控制系統結構
1.1 控制單元的硬件設計
由直流電機控制電子節氣門,需精確控制直流電機以實現節氣門閥片開度的精確控制,作為控制系統的核心單片機主要負責采集、轉換和處理信號,計算控制量并輸出控制信號,實現與計算機的通信,電子節氣門閉環控制系統,由目標開度通過加速踏板模塊輸入,實際開度則由節氣門位置傳感器做出反饋,這兩個過程輸入的是模擬量,為將其轉換為數字量,本文電子節氣門控制系統采用單片機PIC18F458(MICROCHIP公司生產)作為控制單元處理器芯片,TLE6209R(Infineon公司生產)作為直流電機驅動單元的 H 橋驅動芯片,將輸入的模擬信號通過PIC18F458轉化成數字信號,控制信號輸入由加速踏板位置傳感器完成,PIC18F458 將信息綜合處理后完成節氣門最佳開度的計算,并通過電機電子節氣門位置傳感器反饋節氣門位置信號,其硬件電路原理如圖2所示[3]。

圖2 控制系統硬件電路原理圖
1.2 輸入信號處理電路設計
傳入單片機的節氣門位置信號為模擬信號,無法滿足單片機的數字信號的需要,本文通過A/D 轉換電路的設計實現模擬信號到數字信號的轉換,具體的A/D 轉換電路原理如圖3所示, 經過轉換的節氣門位置信號可順利通過單片機的接收和處理[4]如圖3所示。
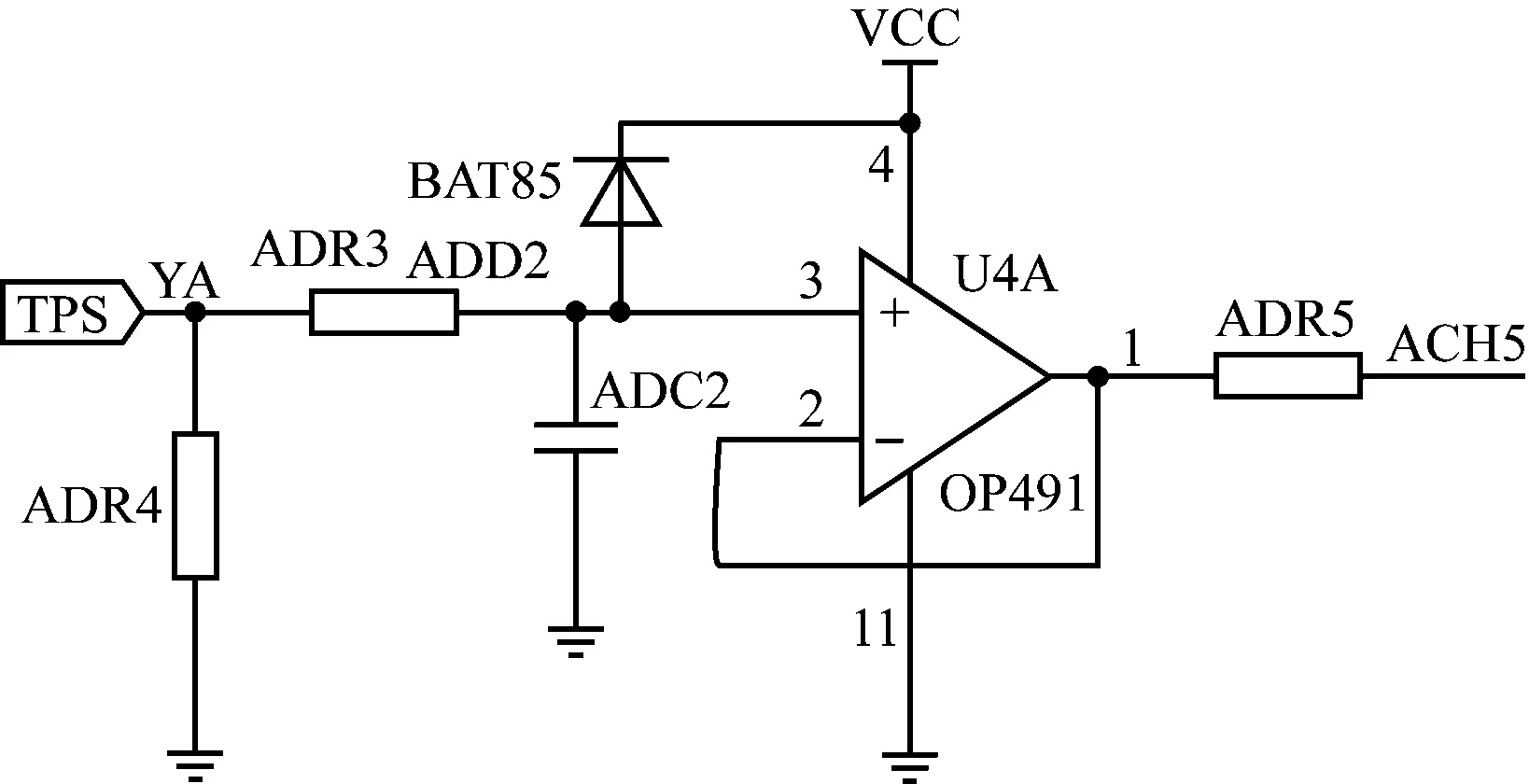
圖3 信號處理電路原理圖
2 控制系統的軟件設計
點火開關在發動機起動前處于關閉狀態,起動發動機時則被置于開始位置,蓄電池的電壓加載到發動機和節氣門控制單元上,將起動標志位置1(起動開始),節氣門閥片將迅速做出往返動作(在0%到100%開度間),從而重新對節氣門閥片的開度作一次標定。系統軟件流程圖如圖4所示[5]。
節氣門控制單元在節氣門位置初始化后,根據讀入冷卻液溫度信號完成對應此溫度的最佳怠速轉速的判斷,轉速傳感器通過對曲軸的轉速進行檢測完成發動機運轉狀態的判斷,節氣門控制單元通過驅動電機完成怠速控制(發動機轉速大于0),或進入循環等待狀態(轉速等于0),直到有發動機轉速信號被檢測到后等待循環中斷,進入到怠速轉速控制程序,調整節氣門閥片至目標怠速位置后,發動機轉速還需通過PID模塊完成閉環調節,以使發動機實際轉速同節氣門控制單元的暖機過程怠速轉速脈譜一致;同時需對加速踏板位置進行檢測,程序在加速踏板位置發生變化時進入發動機瞬態工況的節氣門位置控制程序,以當前車速信號和巡航請求的車速為依據,對節氣門閥片的開度位置進行實時調整,使當前檔位下的發動機轉速同目標車速下的相等,此外系統在巡航模式下還會對檔位、離合器、制動踏板開關等信號進行檢測,一旦檢測出空檔、離合器被切斷或制動踏板被踏下時,控制程序將進入怠速控制模塊;若沒有開啟巡航模式,系統對駕駛員意圖進行判斷時,需以當前車速、發動機狀態和加速踏板位置變化率等信號為依據,選擇出控制節氣門的最佳傳遞函數,在此基礎上節氣門閥片被節氣門驅動電機驅動完成位置的改變,節氣門位置傳感器對實際位置進行檢測,判斷出節氣門實際同目標位置的差別后,為保持節氣門在目標開度將進入PID模塊進行調節,如此不斷循環反復進行控制。

圖4 控制系統軟件流程圖
3 電子節氣門智能控制系統數學模型的構建
電子式節氣門實際是一個機電傳動系統,主要由節氣門位置傳感器、直流電機、驅動電機、減速齒輪組、復位彈簧等構成,具體如圖5所示。
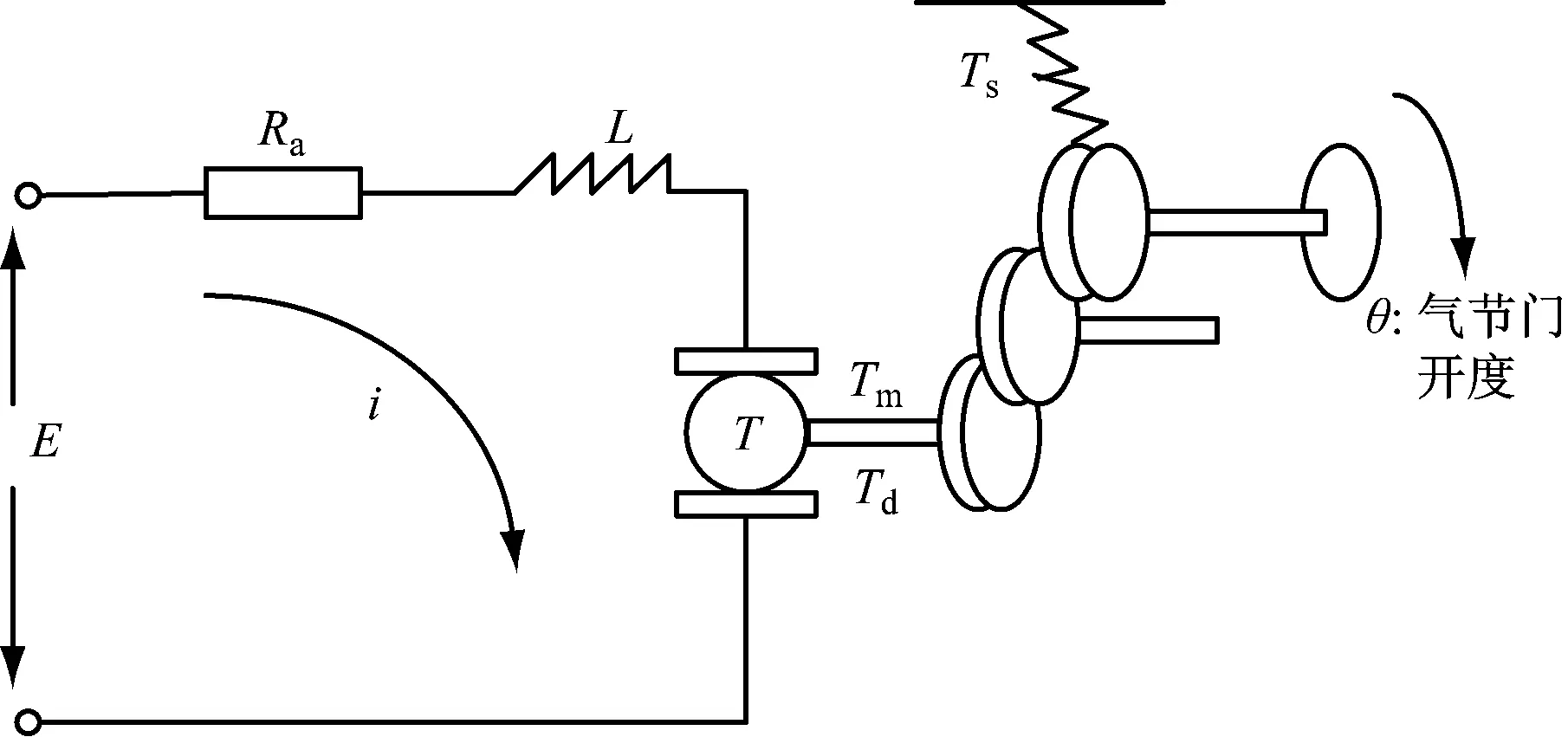
圖5 電子節氣門示意圖
假設由θ表示氣節門開度,由N表示減速比,Tm表示輸入扭矩,Ts表示彈簧轉矩,Kd表示動摩擦系數。
直流電機通過齒輪及復位彈簧實現傳動,克服負載轉矩從而帶動節氣門閥轉動,據此完成節氣門開度的精確控制,構建電子節氣門的數學模型需完成驅動電機數學模型和傳動系統(由齒輪復位彈簧組成)數學模型的構建[6]。
(1) 驅動電機數學模型
通常采用直流電機作為電子節氣門的驅動電機,直流電機等效電路圖如圖6 所示,電阻和電感等效為線圈,分別通過電樞電阻、電感進行限流和緩沖,從而對電機動態性能進行調節。

圖6 直流電機等效電路圖
根據基爾霍夫定律對電路圖進行簡化等效處理,電樞繞組由Ra表示,E表示電源電壓,i表示電流,電源內阻由Rr表示,齒輪減速比由N表示,電樞電感由L表示,電機扭矩系數由Kt表示,電機角速度由ω表示,PWM占空比由u表示,建立直流電機微分方程如式(1)。
(1)
(2) 機械傳動部分
該部分同機械節氣門的傳動相同,電機輸出扭矩通過減速齒輪傳送至節氣門,考慮到電機轉速過快,為對節氣門開度進行有效控制,需將電機轉動角度按比例縮小,將此比例同樣定義為傳動比N,電機角速度由ω1表示,節氣門角速度由ω表示,節氣門開度由θ表示,具體表達式如式(2)—式(4)。
(2)
θ=Nω=Nω1t
(3)
摩擦扭矩方程及彈簧扭矩方程為:
Tf=kdω+krsgn(ω)
(4)
根據電機拖動運動學定律完成電子節氣門運動微分方程的建立,電機轉動慣量由J表示,電機扭矩由Ta表示,具體表達式如式(5)、式(6)。
JN2ω1=NTa-Ts-Tf
(5)
Ta=kti
(6)
將式(4)和式(6)代入(5)可得式(7)、式(8)。
JN2ω1=Nkti-kdω-kfsgn(ω)-ks(θ-θ0)-Dsgn(θ-θ0)
(7)
即:

(8)
由式(1)計算可得式(9)。
(9)
最終的電子節氣門數學模型表達如式(10)。
(10)
4 控制系統仿真實驗
電子節氣門主要構成為直流電機和傳動機構,顯著的線性特征會在電機穩態運行時表現出來,電機變速時則呈現出明顯的非線性,電子節氣門傳動部分表現出非線性特征,為實現對電子節氣門控制系統的快速平穩響應效果,本文采用模糊自適應PID 控制策略,同普通PID 控制、滑模變結構控制進行仿真實驗并對比,電子節氣門參數如表1所示,3種控制模式的控制效果如圖7所示[7]。

表1 電子節氣門參數
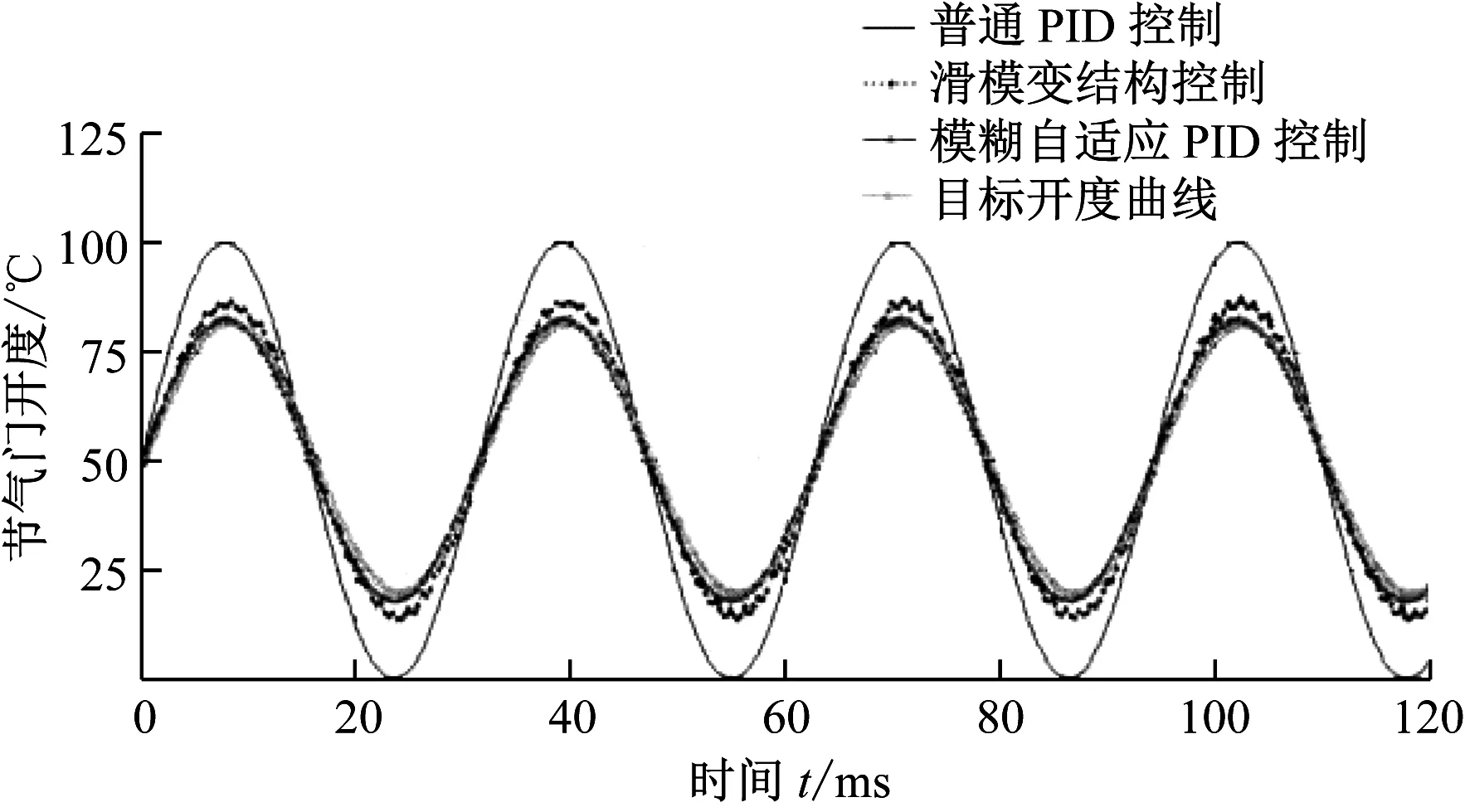
圖7 正弦響應控制效果對比圖
仿真結果表明普通PID控制雖構造簡單且易實現硬件結構,但表現出明顯的超調現象;相比普通 PID控制,滑模變結構控制超調量得以明顯改善,表現出較好的動態跟隨性,但變速時抖動厲害,動態響應性及平穩性較差,控制效果曲線表現出明顯的毛刺;模糊自適應PID 比上述兩種控制方法表現出更好的動態跟隨性和變速平穩性,可使汽車電子節氣門的變速平穩性和響應實效性需求得以有效滿足,使電子節氣門具備較好的控制效果,證明本文設計的汽車電子節氣門智能控制系統具有較大的實用性。
5 總結
本文從電子節氣門控制系統的研究現狀出發,對電子節氣門的軟硬件總體結構進行設計,使電子節氣門通過模糊自適應PID 實現智能控制過程,在此基礎上完成了電子節氣門數學模型的構建,對比三種電子節氣門控制模式的仿真實驗,結果表明采用模糊自適應PID 控制的系統可使電子節氣門達到良好的控制效果,表現出較好的動態響應和平穩變速性能。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
電子制作(2018年11期)2018-08-04 03:25:42
黃河之聲(2017年13期)2017-01-28 13:30:17
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車與新動力(2015年1期)2015-02-27 12:11:01
