基于ROS 的倉庫巡邏機(jī)器人設(shè)計
2019-10-22 06:36:44瞿志二吐魯遜江克熱木袁良祺付建君田暢
現(xiàn)代計算機(jī) 2019年23期
瞿志二,吐魯遜江·克熱木,袁良祺,付建君,田暢
(北京信息科技大學(xué)儀器科學(xué)與光電工程系,北京100192)
0 引言
隨著人工智能等關(guān)鍵技術(shù)廣泛應(yīng)用,智能機(jī)器人發(fā)展迅速,其在提高生產(chǎn)效率與品質(zhì)的同時人類體力上得到了極大的解放。在制造業(yè)、物流行業(yè)、農(nóng)業(yè)、交通運輸業(yè)、醫(yī)院、銀行、娛樂等領(lǐng)域以及日常生活中都能夠見到各種應(yīng)用機(jī)器人;如機(jī)場、車站的安全巡邏機(jī)器人,商場、超市的服務(wù)機(jī)器人,社區(qū)的安保機(jī)器人等;未來還將有農(nóng)業(yè)機(jī)器人、道路交通執(zhí)法機(jī)器人問世。智能機(jī)器在實際生活領(lǐng)域的運用越來越多,智能機(jī)器與人類社會的聯(lián)系越來越緊,如何將機(jī)器人運用在各個行業(yè)中便成為了機(jī)器人領(lǐng)域發(fā)展的重中之重。
基于ROS(Robot Operating System)的倉庫巡邏機(jī)器人采用卡片式電腦樹莓派作為上位機(jī)控制中心,激光雷達(dá)RPLIDARA1 采集周圍環(huán)境信息進(jìn)行繪制地圖,結(jié)合溫度傳感器、火焰?zhèn)鞲衅鳌熿F傳感器和熱釋電傳感器等傳感器檢測外部環(huán)境。此倉庫巡邏機(jī)器人事先學(xué)習(xí)并記錄,以倉庫外部構(gòu)造為主體,倉庫內(nèi)部環(huán)境為核心,在實現(xiàn)倉庫循環(huán)巡邏的功能的同時對于倉庫的溫度、濕度、煙霧、外來物體等信息進(jìn)行閾值判斷實現(xiàn)警告功能。
1 硬件結(jié)構(gòu)設(shè)計
1.1 倉庫巡邏機(jī)器人硬件組成
ROS 系統(tǒng)是控制機(jī)器人的一個框架,包含各種用于控制機(jī)器人的軟件包,在編寫機(jī)器人程序時,修改參數(shù)或者直接引用即可。每個執(zhí)行程序可以獨立設(shè)計,然后在運行時松散、實時的組合起來[2]。
巡邏機(jī)器人系統(tǒng)采用樹莓派控制器作為控制核心平臺,利用激光雷達(dá)采集環(huán)境信息,在ROS 分布式框架下進(jìn)行軟件算法的開發(fā),實現(xiàn)基于掃描匹配算法的SLAM 功能、基于最優(yōu)路徑算法路徑規(guī)劃以及基于粒子濾波算法的導(dǎo)航功能[3]。
巡邏機(jī)器人采用卡片式電腦樹莓派作為上位機(jī)控制中心來驅(qū)動整個機(jī)器人,激光雷達(dá)RPLIDARA1 采集周圍環(huán)境信息進(jìn)行繪制地圖以避免障礙物。它具有SLAM(Simultaneous Localization And Mapping)功能,同步定位與地圖構(gòu)建[4]。攝像頭能夠把視頻圖像傳輸給監(jiān)控中心。通過九軸運動處理傳感器獲取外界環(huán)境結(jié)合坐標(biāo)系統(tǒng)進(jìn)行坐標(biāo)轉(zhuǎn)換。傳感器電路把外界信息提供給樹莓派并判斷外界環(huán)境情況。利用Arduino2560作下位機(jī)進(jìn)行電機(jī)的驅(qū)動,采集電機(jī)編碼器的數(shù)據(jù)發(fā)送給樹莓派。報警電路根據(jù)樹莓派獲取到的傳感器信息來進(jìn)行報警。如圖1 所示為倉庫巡邏機(jī)器人的硬件系統(tǒng)。
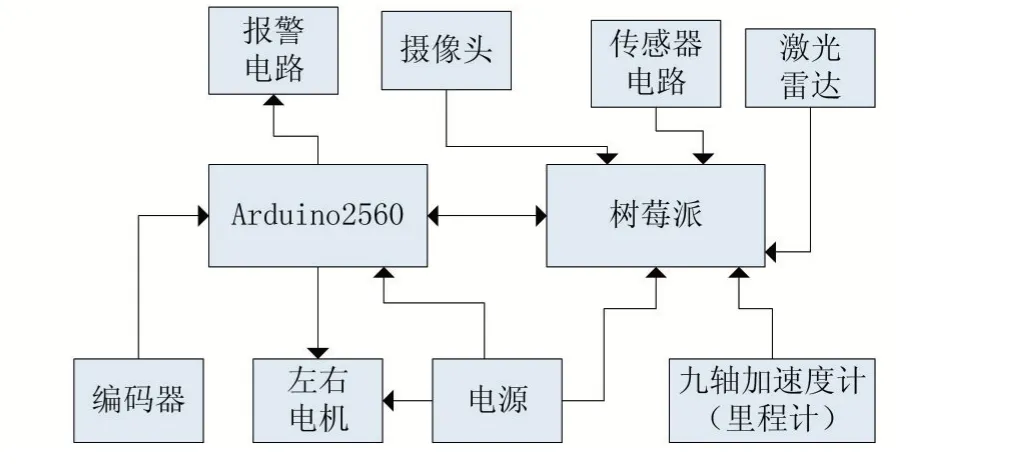
圖1 巡邏機(jī)器人的硬件系統(tǒng)
1.2 核心控制器
機(jī)器人的核心控制器是由英國慈善組織開發(fā)的基于ARM 架構(gòu)的可以運行Linux 操作系統(tǒng)的卡片式電腦。ROS 機(jī)器人系統(tǒng)運行在基于Linux 內(nèi)核的Ubuntu Mate 操作系統(tǒng)上。本文設(shè)計的倉庫巡邏機(jī)器人上的樹莓派是CPU 四核1.2GHz,內(nèi)存1GB RAM,4 個USB接口,40 個GPIO,HDMI 接口,相機(jī)端口,TF 卡端口。除了樹莓派,還有下位機(jī)ARDUINO2560,它可以驅(qū)動四個電機(jī)并把電機(jī)上編碼器的數(shù)據(jù)發(fā)送給樹莓派,樹莓派上ROS 系統(tǒng)通過PID 來控制小車的運行。
1.3 激光雷達(dá)
機(jī)器人探測地圖定位導(dǎo)航建立在激光雷達(dá)技術(shù)基礎(chǔ)之上,本文設(shè)計的機(jī)器人上采用的是SLAMTEC——思嵐科技研發(fā)的RPLIDAR。發(fā)動指令驅(qū)動rplidar_a1內(nèi)電機(jī)運轉(zhuǎn),360 度發(fā)射激光并接受反射,得到的距離數(shù)據(jù)間隔為1 度,將360 度的數(shù)據(jù)以串口的形式發(fā)送給上位機(jī),上位機(jī)軟件解析協(xié)議,并轉(zhuǎn)化成ROS 下標(biāo)準(zhǔn)的激光雷達(dá)數(shù)據(jù)格式Laser,通過/scan 這個主題發(fā)布。激光雷達(dá)是通過向目標(biāo)發(fā)射激光束再接收目標(biāo)反射的光束來測量與目標(biāo)的距離等參數(shù),并且基于三角測量原理,利用障礙物遠(yuǎn)近不同的反射角度測量距離建立地圖。激光雷達(dá)是一種主動傳感器,不受外界環(huán)境的影響,可以對環(huán)境的不確定性、時變性進(jìn)行自適應(yīng)調(diào)節(jié),采集信息可靠,有利于機(jī)器人障礙檢測[4]。TF 是一種可以提供給使用者進(jìn)行調(diào)用的功能包,允許使用者跟蹤數(shù)個參考系的數(shù)據(jù),其利用樹狀數(shù)據(jù)結(jié)構(gòu)在不同參考系的坐標(biāo)之間進(jìn)行緩沖并更新數(shù)據(jù)。
1.4 其他模塊
巡邏機(jī)器人可以添加其他傳感器,例如攝像頭來獲取圖像信息、溫度傳感器檢測外部環(huán)境溫度、煙霧傳感器檢測煙霧濃度、熱釋電傳感器檢測紅外線輻射等。機(jī)器人電源為充電電池,續(xù)航時間為3 個小時,電池電量過低時會有電壓檢測裝置提示需要充電。mpu6050 是九軸傳感器,包括重力加速計、陀螺儀和電子羅盤里程計。主要作用是獲取加速度、角速度,通過I2C 將數(shù)據(jù)發(fā)送給樹莓派,樹莓派結(jié)合二者求出姿態(tài)四元數(shù),在TF 坐標(biāo)轉(zhuǎn)換中進(jìn)行運算。
2 軟件設(shè)計
ROS Master 是ROS 的調(diào)度中樞,可以看作是一個服務(wù)器,其余節(jié)點是發(fā)布者或訂閱者[5],通過話題或者服務(wù)來進(jìn)行交流。在監(jiān)控操作層,通過裝有Ubuntu 的系統(tǒng)連接巡邏機(jī)器人,在監(jiān)控界面能夠獲取巡邏機(jī)器人的相關(guān)信息。巡邏機(jī)器人的核心為裝有ROS 的Ubuntu 系統(tǒng)。使用者通過監(jiān)控界面,控制巡邏機(jī)器人進(jìn)行巡邏監(jiān)控;巡邏機(jī)器人通過視頻圖像傳輸節(jié)點獲取當(dāng)前的圖像,并且利用運動節(jié)點控制巡邏機(jī)器人運動,并建立地圖檔案信息。巡邏機(jī)器人通過保存好的地圖檔案信息能夠進(jìn)行自主導(dǎo)航、定點巡邏、自主選擇最佳路徑巡邏監(jiān)控。如圖2 所示為倉庫巡邏機(jī)器人軟件框架,通過感知執(zhí)行層獲取外部信息的獲取,利用導(dǎo)航控制層實現(xiàn)內(nèi)外部的信息傳輸,使用者通過監(jiān)視操作層實現(xiàn)對巡邏機(jī)器人的控制與監(jiān)視。
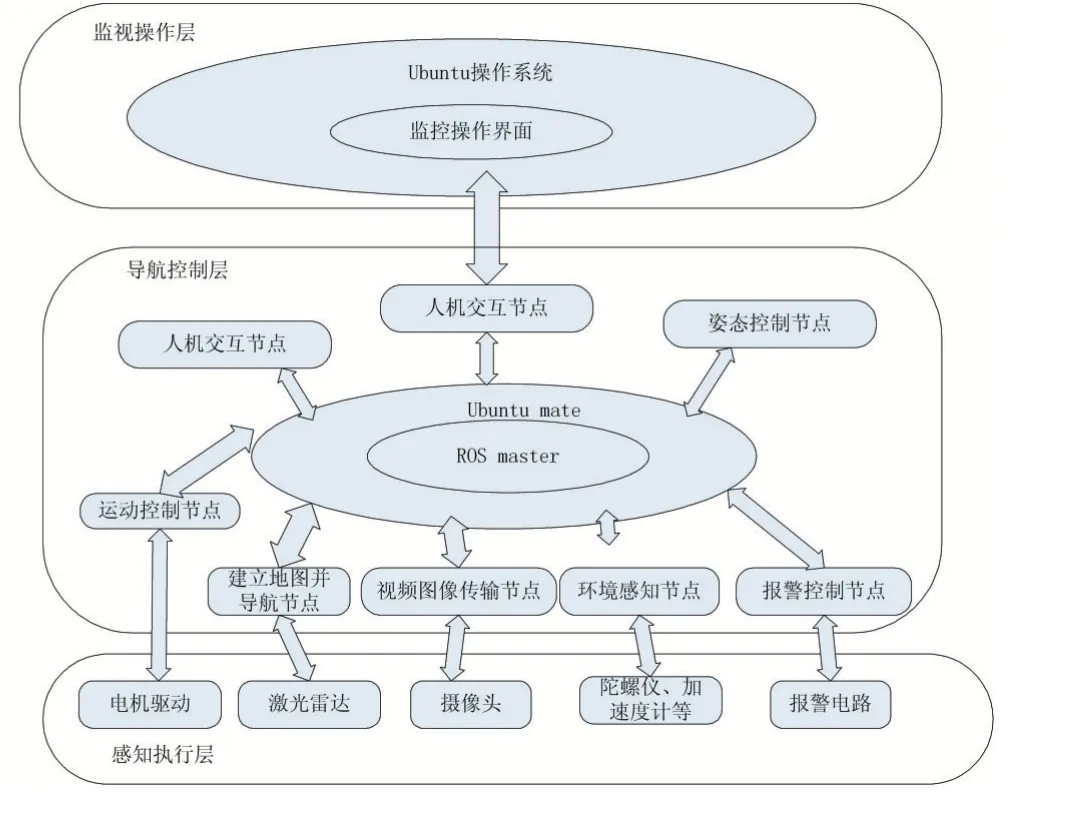
圖2 倉庫巡邏機(jī)器人軟件框架
判斷倉庫中是否有外來物體的侵入,倉庫中的物體他是否發(fā)生過移動,可以采取差影法進(jìn)行檢測。差影法實際上是對圖像進(jìn)行代數(shù)運算的一種不同的叫法,代數(shù)運算是指對兩幅輸入圖像進(jìn)行點對點加、減、乘、除計算而得到輸出圖像的運算[6]。本文運用到的是圖像的減運算方法,對兩張圖像進(jìn)行差值處理,刪除圖像中相同的部分(背景信息)留下不相同的部分(外來信息)。其目的是為了過濾掉圖像中所不需要的部分信息只保留關(guān)鍵信息部分,再對差值處理后的圖像進(jìn)行開運算或者濾波等操作。這樣的處理方法首先可以減少背景信息的干擾,利于使用者對于關(guān)鍵信息的處理;其次也減少了由于攝像機(jī)抖動或者外部干擾因素的影響。
一般實際生活中采取間隔時間拍攝圖像對比的方法進(jìn)行差影分析,例如銀行金庫、森林火災(zāi)、水庫水位等等情況的發(fā)生,差影法在實際生活中的自動現(xiàn)場監(jiān)測應(yīng)用非常廣泛。若A(x,y)為庫中保存的原始背景圖像、B(x,y)為攝像機(jī)輸入圖像,C(x,y)為系統(tǒng)輸出圖像,則三種圖像的關(guān)系可以通過差影法公式(1)來表示:

3 系統(tǒng)測試
3.1 建立巡邏地圖
設(shè)計制作的巡邏機(jī)器人能夠有效實現(xiàn)巡邏、自主導(dǎo)航和運動控制等功能,這樣的功能大大的簡化了工程師在實際運用時的工作量,能夠有效的將機(jī)器人所獲得的信息與實際情況結(jié)合起來實時獲取外界環(huán)境信息的,查看機(jī)器人所拍攝的視頻圖像,建立循環(huán)地圖,方便工程師監(jiān)控并設(shè)置機(jī)器人行走路線,且根據(jù)使用者需要自由的設(shè)置巡邏路線。經(jīng)過多次試驗,生成了實驗室的地圖如圖3 所示,建立的圖像為巡邏機(jī)器人可以進(jìn)入到的位置,這種地圖不具有普遍性,當(dāng)且僅當(dāng)此巡邏機(jī)器人可以探測到的巡邏位置。
3.2 檢測外來物體
智能巡邏機(jī)器人巡邏并檢測外來物體可以利用差影法進(jìn)行處理,檢測系統(tǒng)的判定如圖4 所示,可以檢測到圖像的變化且能直接提取出在背景中摻雜外來物體。如圖4(a)所示是倉庫巡邏機(jī)器人先將某一個場景的信息以事先學(xué)習(xí)并記錄的圖像或視頻形式保存在庫中。當(dāng)巡邏機(jī)器人巡視到某個地方時,拍攝此處的圖像并與庫中的信息進(jìn)行對比,當(dāng)超過某個閾值時產(chǎn)生報警信息。如圖4(b)所示為某個場景中進(jìn)加入了外來物體,此時將圖像與庫中的信息進(jìn)行對比如圖4(c)所示為背景與加入外來物體圖像的差值圖片。單片機(jī)將得到圖像的差值進(jìn)行灰度變化計算,就可以利用圖像的灰度值大小來設(shè)定閾值。
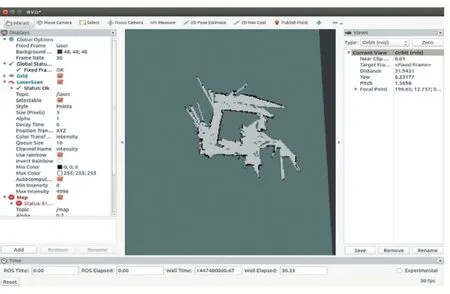
圖3 巡邏導(dǎo)航測試
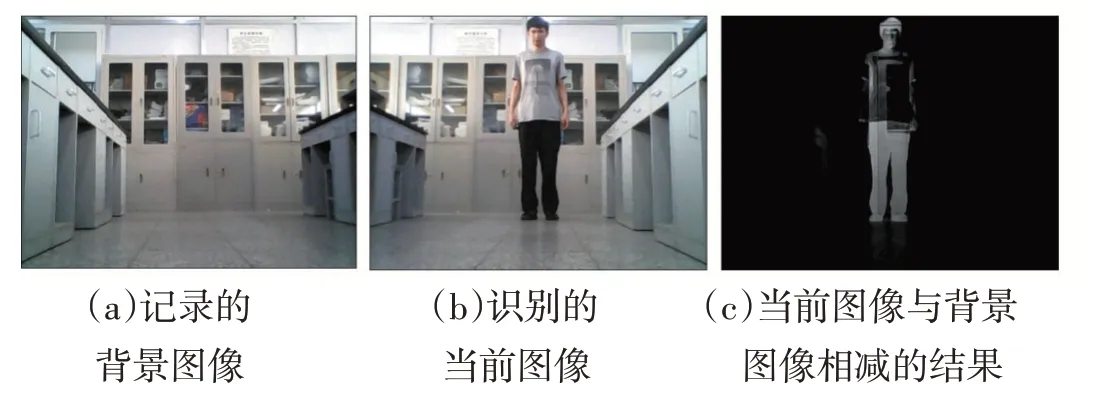
圖4 利用差影法檢測外來物體判定
4 結(jié)語
本文提出了一種基于ROS 的倉庫巡邏機(jī)器人的系統(tǒng)設(shè)計方案。以樹莓派為核心控制器,利用激光雷達(dá)獲取外界環(huán)境信息建立地圖,實現(xiàn)SLAM 功能。其他傳感器獲取外界環(huán)境信息達(dá)到巡邏警戒目的。ROS的設(shè)計加快了機(jī)器人的模塊化編程,提高了代碼復(fù)用率。倉庫巡邏機(jī)器人的技術(shù)關(guān)鍵是地圖構(gòu)建和定位導(dǎo)航,在特定位置將拍攝到的圖像與庫中存儲的圖像進(jìn)行差影法處理,初步實現(xiàn)進(jìn)行室內(nèi)監(jiān)控、巡邏、報警等功能。巡邏小車機(jī)器人的實現(xiàn)主要是將靜態(tài)多攝像頭轉(zhuǎn)換為動態(tài)單攝像頭的實現(xiàn),這種方法一般性的將監(jiān)控報警功能實時的流動在多個區(qū)域,可以實現(xiàn)流動監(jiān)控、動態(tài)監(jiān)測的功能,與傳統(tǒng)的靜態(tài)攝像頭相比靈活性高、自由性強、監(jiān)控強度大、監(jiān)控區(qū)域廣、監(jiān)控細(xì)節(jié)多的優(yōu)點,實現(xiàn)了動態(tài)智能巡邏功能。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32