簡(jiǎn)述智能汽車自動(dòng)駕駛的控制方法
2019-10-21 07:30:00莊佳琪
錦繡·上旬刊 2019年7期
莊佳琪
摘 要:本文將針對(duì)智能汽車自動(dòng)駕駛的控制方法進(jìn)行簡(jiǎn)要分析和探究,旨在有效提升汽車自動(dòng)駕駛技術(shù)的應(yīng)用效果,為智能汽車創(chuàng)造更加廣闊的發(fā)展空間。
關(guān)鍵詞:智能汽車;自動(dòng)駕駛;控制方法
引言
隨著人們生活水平的不斷提升,對(duì)于出行工具的選擇提出了更高的要求。現(xiàn)代科學(xué)技術(shù)的發(fā)展使得越來(lái)越多的智能汽車被廣泛應(yīng)用于人們的日常生活,而自動(dòng)駕駛技術(shù)的應(yīng)用與發(fā)展更加提升了智能汽車的使用性能。通過(guò)智能汽車自動(dòng)駕駛的控制系統(tǒng)能夠有效滿足智能汽車自動(dòng)駕駛的需求,明確自動(dòng)駕駛控制的方法,并在仿真驗(yàn)證分析中,有效提升智能汽車自動(dòng)控制的效果,提高汽車自動(dòng)駕駛的水平。
1 智能汽車自動(dòng)駕駛車輛控制模型的構(gòu)建
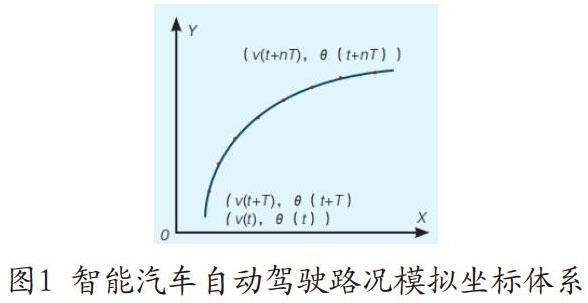
在對(duì)智能汽車自動(dòng)駕駛系統(tǒng)監(jiān)督的過(guò)程中,系統(tǒng)的控制運(yùn)行中轉(zhuǎn)向和轉(zhuǎn)角與對(duì)車輛的控制存在一定關(guān)系,因此,要想提升汽車運(yùn)行控制的監(jiān)督質(zhì)量,需要在建立智能汽車自動(dòng)駕駛系統(tǒng)控制模型的過(guò)程中,根據(jù)道路行車的實(shí)際控制情況、汽車方向盤轉(zhuǎn)角的控制和汽車間距的控制構(gòu)建模型。接下來(lái),根據(jù)智能汽車自動(dòng)駕駛控制的實(shí)際需求,根據(jù)大地坐標(biāo)系將整個(gè)汽車駕駛控制中的坐標(biāo)體系模型進(jìn)行構(gòu)建,并對(duì)坐標(biāo)系的控制數(shù)據(jù)模型進(jìn)行適當(dāng)調(diào)整,確保在對(duì)模型的控制與調(diào)整工作中有效提升對(duì)智能汽車自動(dòng)駕駛控制系統(tǒng)的控制效果。在對(duì)系統(tǒng)描述功能進(jìn)行控制的過(guò)程中,能夠?qū)χ悄芷囎詣?dòng)駕駛控制系統(tǒng)進(jìn)行監(jiān)督。根據(jù)圖1可看出,在構(gòu)建數(shù)據(jù)模型時(shí),嚴(yán)格根據(jù)汽車仿真系統(tǒng)的構(gòu)建要求,對(duì)汽車自動(dòng)駕駛控制系統(tǒng)控制中的數(shù)據(jù)和模型做出了有效調(diào)整,并根據(jù)智能汽車自動(dòng)駕駛控制的實(shí)際需求,開(kāi)展車輛自動(dòng)駕駛控制中的行駛模型的設(shè)計(jì)工作,同時(shí),對(duì)汽車自動(dòng)駕駛系統(tǒng)控制的過(guò)程中,對(duì)汽車的控制狀況、道路情況以及仿真信息進(jìn)行全面分析,確保在智能汽車自動(dòng)駕駛的過(guò)程中,使汽車對(duì)前方路況的監(jiān)督狀態(tài)以及系統(tǒng)的控制反饋為一個(gè)整體,并通過(guò)調(diào)節(jié)汽車的反饋系統(tǒng)對(duì)汽車的智能化監(jiān)督控制體系進(jìn)行相應(yīng)調(diào)整,進(jìn)而提升對(duì)整個(gè)車輛的自動(dòng)控制效果。
2 智能汽車自動(dòng)駕駛車輛道路狀況的識(shí)別
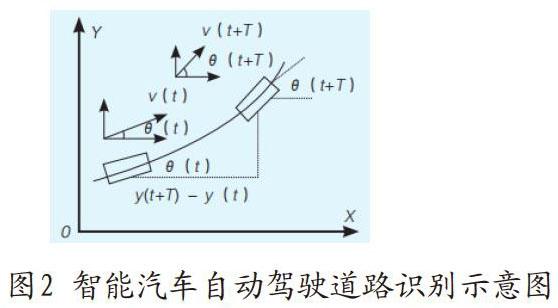
在智能汽車自動(dòng)駕駛過(guò)程中,需要明確掌握前方道路的具體情況,因此,需要通過(guò)對(duì)道路狀況信息的處理與識(shí)別,確保汽車運(yùn)行的安全性和穩(wěn)定性。在此過(guò)程中,利用GPS定位系統(tǒng)與智能汽車自動(dòng)駕駛的控制系統(tǒng)對(duì)道路及車輛情況進(jìn)行識(shí)別和調(diào)整,并根據(jù)車輛道路的實(shí)際情況對(duì)監(jiān)督控制信息進(jìn)行有效識(shí)別。由圖2能夠看出,在對(duì)車輛和道理情況進(jìn)行識(shí)別的過(guò)程中,采用的是狀態(tài)識(shí)別監(jiān)督控制體系,并根據(jù)汽車運(yùn)行監(jiān)督控制的實(shí)際要求,對(duì)道路的實(shí)際情況進(jìn)行有效識(shí)別。圖2中顯示點(diǎn)t為汽車監(jiān)督運(yùn)行的時(shí)刻,將其與道路識(shí)別的情況進(jìn)行有效整合,能夠確保在汽車的識(shí)別監(jiān)督和控制工作中,有效提升車輛自動(dòng)駕駛的監(jiān)督水平。在汽車對(duì)道路情況進(jìn)行識(shí)別的過(guò)程中,在需要進(jìn)行轉(zhuǎn)向時(shí),需要根據(jù)對(duì)自動(dòng)駕駛的監(jiān)督控制需求,對(duì)汽車的轉(zhuǎn)速、轉(zhuǎn)向的行駛趨勢(shì)以及加速度的變化進(jìn)行有效控制,并確保對(duì)整個(gè)車輛運(yùn)行過(guò)程的有效監(jiān)督,保證車輛轉(zhuǎn)向的精準(zhǔn)度。如果汽車在道路狀況識(shí)別的過(guò)程中,由于已知向量導(dǎo)致車輛運(yùn)行向著縱向趨勢(shì)進(jìn)行變化,那么需要通過(guò)設(shè)立相應(yīng)的車輛狀態(tài)監(jiān)督形態(tài),實(shí)現(xiàn)對(duì)汽車自動(dòng)駕駛的有效控制。在汽車對(duì)道路狀況進(jìn)行識(shí)別的過(guò)程中,汽車的狀態(tài)信息和汽車的運(yùn)動(dòng)狀況發(fā)生著改變,此時(shí),需要通過(guò)明確車輛的狀態(tài)信息和車輛方向盤的轉(zhuǎn)動(dòng)角度對(duì)汽車進(jìn)行有效控制,進(jìn)而提升汽車自動(dòng)駕駛中對(duì)道路的自動(dòng)識(shí)別能力,確保智能汽車自動(dòng)駕駛過(guò)程的穩(wěn)定性與可靠性。
3 智能汽車自動(dòng)駕駛模糊自適應(yīng)PID自動(dòng)駕駛系統(tǒng)
在對(duì)智能汽車自動(dòng)駕駛的控制過(guò)程中,需要根據(jù)汽車自動(dòng)駕駛控制的基本要求,有效調(diào)整與轉(zhuǎn)變車輛的自動(dòng)駕駛控制體系,進(jìn)而有效提高智能汽車自動(dòng)駕駛控制的效果。本文研究了通過(guò)車輛模糊自適應(yīng)PID自動(dòng)駕駛系統(tǒng)對(duì)智能汽車自動(dòng)駕駛過(guò)程的有效控制,應(yīng)用該方法對(duì)汽車行駛過(guò)程中的程序以及各項(xiàng)參數(shù)變化進(jìn)行掌握與分析,并對(duì)車輛運(yùn)行算法模型進(jìn)行統(tǒng)計(jì)與整合。在傳統(tǒng)模糊控制的過(guò)程中,對(duì)汽車自動(dòng)駕駛控制中的參數(shù)變化以及汽車的自適應(yīng)能力變化進(jìn)行了相應(yīng)的調(diào)整與改善,同時(shí),通過(guò)自動(dòng)模糊控制體系的應(yīng)用,極大改善了智能汽車自動(dòng)化控制的傳輸效果,在汽車運(yùn)行狀態(tài)改變的過(guò)程中,有效縮小了汽車自動(dòng)控制角度和方向的誤差值。因此,模糊自適應(yīng)PID自動(dòng)駕駛系統(tǒng)的應(yīng)用能夠有效提高智能汽車自動(dòng)駕駛的控制水平,進(jìn)而有效確保智能汽車在自動(dòng)駕駛過(guò)程中的平穩(wěn)性與安全性。
4 智能汽車自動(dòng)駕駛控制仿真驗(yàn)證
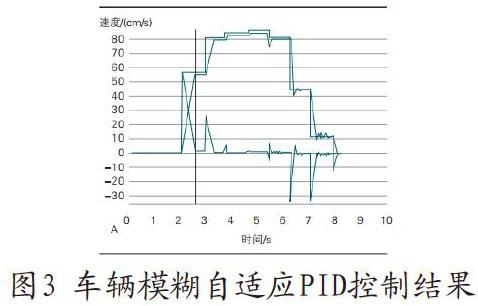
對(duì)整個(gè)智能汽車自動(dòng)駕駛控制體系的仿真實(shí)驗(yàn)進(jìn)行調(diào)整的過(guò)程中,需要嚴(yán)格按照智能汽車自動(dòng)駕駛控制的要求進(jìn)行。模糊自適應(yīng)PID控制體系的應(yīng)用對(duì)汽車的自動(dòng)駕駛運(yùn)行狀態(tài)進(jìn)行了有效的控制,提升了汽車監(jiān)督控制形式的合理性和有效性,同時(shí),通過(guò)對(duì)汽車運(yùn)行的監(jiān)督與控制,根據(jù)構(gòu)建仿真模型的要求對(duì)智能汽車自動(dòng)駕駛進(jìn)行有效的驗(yàn)證。通過(guò)圖3可以看出,智能汽車自動(dòng)駕駛控制技術(shù)水平提升的同時(shí),使得相應(yīng)的模糊控制穩(wěn)定性產(chǎn)生了一定變化,因此,為保證更好的汽車自動(dòng)駕駛運(yùn)行的監(jiān)督控制水平,需要根據(jù)控制工作的具體要求,及時(shí)對(duì)汽車的瞬時(shí)加速度和汽車的運(yùn)行速度及時(shí)間進(jìn)行有效調(diào)整,進(jìn)而確保智能汽車自動(dòng)駕駛過(guò)程的安全性與平穩(wěn)性。
結(jié)語(yǔ)
綜上所述,自動(dòng)駕駛技術(shù)的發(fā)展為智能汽車帶來(lái)了更加光明的發(fā)展前景和更加廣闊的發(fā)展空間。因此,為了有效提升智能汽車自動(dòng)控制系統(tǒng)運(yùn)行的效果,需要利用模糊自適應(yīng)PID控制方法,對(duì)汽車的整個(gè)運(yùn)行控制過(guò)程進(jìn)行調(diào)整,同時(shí)利用仿真驗(yàn)證將汽車運(yùn)行控制中的構(gòu)件進(jìn)行組建,進(jìn)而實(shí)現(xiàn)對(duì)該控制方法應(yīng)用效果的分析,使得智能汽車在大地坐標(biāo)系實(shí)時(shí)定位監(jiān)督的控制中,保持良好的自動(dòng)駕駛效果。
參考文獻(xiàn)
[1]來(lái)飛,黃超群,胡博.智能汽車自動(dòng)駕駛技術(shù)的發(fā)展與挑戰(zhàn)[J].西南大學(xué)學(xué)報(bào)(自然科學(xué)版),2019,41(08):124-133.
[2]李盛福.復(fù)雜環(huán)境下智能汽車自動(dòng)駕駛系統(tǒng)研究[J].機(jī)械設(shè)計(jì)與制造,2019(05):199-203+207.