托森差速器建模及運(yùn)動(dòng)仿真
2019-10-21 09:29:23關(guān)亮亮賴文鐵徐宏波徐子豪
汽車實(shí)用技術(shù) 2019年12期
關(guān)亮亮 賴文鐵 徐宏波 徐子豪

摘 要:汽車差速器是能夠使左、右兩個(gè)驅(qū)動(dòng)輪實(shí)現(xiàn)以不同轉(zhuǎn)速轉(zhuǎn)動(dòng)的一種機(jī)構(gòu)。主要由左右半軸齒輪、行星齒輪(至少一組)及齒輪架組成。功用是當(dāng)汽車轉(zhuǎn)彎行駛或在不平路面上行駛時(shí),使左右車輪以不同轉(zhuǎn)速滾動(dòng),即保證兩側(cè)驅(qū)動(dòng)車輪作純滾動(dòng)運(yùn)動(dòng)。托森(Torsen)差速器就是眾多差速器中十分著名的一種。文章將針對(duì)托森差速器,在3D建模軟件Solid Works中建立裝配模型,并對(duì)其進(jìn)行運(yùn)動(dòng)學(xué)仿真,通過(guò)對(duì)運(yùn)動(dòng)學(xué)仿真結(jié)果分析,得到其運(yùn)動(dòng)特性。
關(guān)鍵詞:托森差速器;運(yùn)動(dòng)仿真;Solid Works
中圖分類號(hào):TP23? 文獻(xiàn)標(biāo)識(shí)碼:A? 文章編號(hào):1671-7988(2019)12-85-03
Abstract: Automotive differential is a mechanism which allows the left and right driving wheels rotate at different speeds. It mainly consists of left and right half axle gears, planetary gears (a pair at least) and the gear frame. Its function is to allow the left and right wheels rolling at different speeds when the car is steering or driving on uneven roads, which ensure the pure rolling motion of the driving wheels on both sides. Torsen differential is one of the most famous differentials. In this paper, the assembly model of Torson differential is built in Solid Works, which is a 3D modeling software, and its kinematics simulation is carried out. Through the analysis of kinematics simulation results, the kinematics characteristics of Torson differential are obtained.
Keywords: Torsen Differential; Kinematics Simulation; Solid Works
引言
汽車差速器是一種能夠使左、右驅(qū)動(dòng)輪實(shí)現(xiàn)不同速度轉(zhuǎn)動(dòng)的機(jī)械結(jié)構(gòu)。功用是當(dāng)汽車轉(zhuǎn)彎或駛過(guò)不平路面時(shí),允許左右車輪以不同轉(zhuǎn)速滾動(dòng),進(jìn)而保證兩側(cè)驅(qū)動(dòng)車輪作純滾動(dòng)。Torsen(托森)差速器,是一種由美國(guó)人發(fā)明的差速器,從最初的A型差速器到B型,再到現(xiàn)在的托森C型差速器,一共經(jīng)歷三代產(chǎn)品。它利用蝸輪蝸桿傳動(dòng)的不可逆性原理和齒面高摩擦條件,使差速器根據(jù)其內(nèi)部差動(dòng)轉(zhuǎn)矩的大小而自動(dòng)鎖死或松開(kāi),這樣可以有效地提高汽車的通過(guò)能力。
本文將針對(duì)第一代托森差速器,即A型托森差速器(如圖1所示),進(jìn)行3D模型建立和裝配及運(yùn)動(dòng)仿真,并對(duì)其差速結(jié)果和運(yùn)動(dòng)學(xué)特性進(jìn)行分析。
1 裝配模型
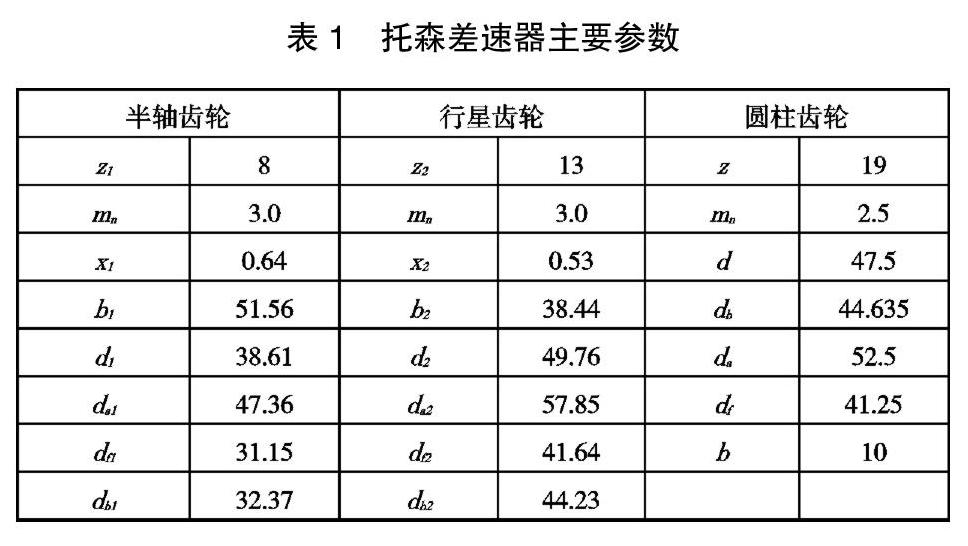
本文章所建立3D模型的A型托森差速器,其主要參數(shù)如下:
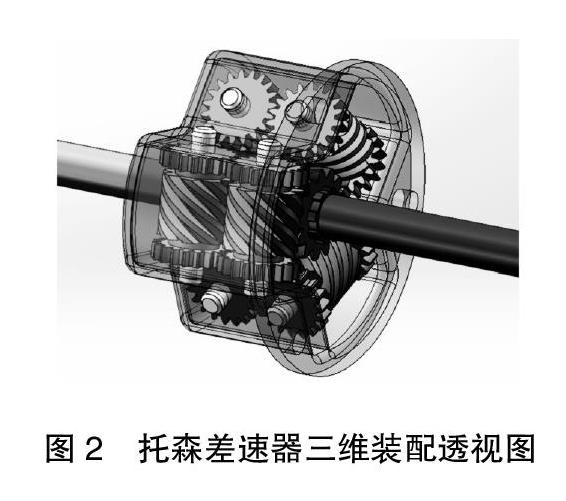
利用三維軟件Solid Works建立模型如下圖所示:
2 運(yùn)動(dòng)仿真
2.1 仿真設(shè)置
分別按以下幾種工況進(jìn)行運(yùn)動(dòng)仿真。
1)直線行駛工況,即左右半軸以相同的速度旋轉(zhuǎn),在此工況下,將差速器殼體的轉(zhuǎn)速,與其中一個(gè)半軸的轉(zhuǎn)速設(shè)置成相同的數(shù)值,將另外一個(gè)半軸的轉(zhuǎn)速設(shè)置成為自由輸出端,同時(shí)輸出左右半軸及差速器殼體的轉(zhuǎn)速,并對(duì)三者的轉(zhuǎn)速關(guān)系進(jìn)行分析。
2)差速行駛工況,即左右半軸以不同的速度旋轉(zhuǎn),在此工況下,將差速器殼體的轉(zhuǎn)速設(shè)置成為固定轉(zhuǎn)速,其中一個(gè)半軸的轉(zhuǎn)速設(shè)置成與差速器轉(zhuǎn)速不同的數(shù)值,將另外一個(gè)半軸的轉(zhuǎn)速設(shè)置成為自由輸出端,同時(shí)輸出左右半軸及差速器殼體的轉(zhuǎn)速,并對(duì)三者的轉(zhuǎn)速關(guān)系進(jìn)行分析。在此種工況運(yùn)動(dòng)仿真中,共進(jìn)行兩種狀態(tài)的仿真,第一種是一個(gè)半軸轉(zhuǎn)速為0,第二種是將該半軸轉(zhuǎn)速設(shè)置為差速器轉(zhuǎn)速的一半。
在Solid Works軟件的運(yùn)動(dòng)仿真界面的motion分析,對(duì)黃色半軸與差速器殼體,分別設(shè)置兩個(gè)馬達(dá)。如下圖所示:
(a)在0-5s內(nèi),兩個(gè)馬達(dá)以相同轉(zhuǎn)速30RPM進(jìn)行轉(zhuǎn)動(dòng)。
(b)5-6s,黃色半軸的馬達(dá)速度減為0,差速器殼體仍以30RPM進(jìn)行轉(zhuǎn)動(dòng)。
(c)6-11s,黃色半軸馬達(dá)速度保持為0,差速器以30RPM進(jìn)行轉(zhuǎn)動(dòng)。
(d)11-12s,黃色半軸的馬達(dá)速度從0變?yōu)椴钏倨鳉んw的一半,即15RPM,差速器殼體仍以30RPM進(jìn)行轉(zhuǎn)動(dòng)。
(e)12-17s,黃色半軸的馬達(dá)速度以15RPM轉(zhuǎn)動(dòng),差速器殼體仍以30RPM進(jìn)行轉(zhuǎn)動(dòng)。
2.2 仿真結(jié)果
仿真后可知,各部分運(yùn)轉(zhuǎn)嚙合良好,齒輪與其他部分裝配良好,無(wú)干涉現(xiàn)象。
最后得出各部分的轉(zhuǎn)速曲線,如下圖所示。由于差速器殼體在整個(gè)仿真過(guò)程中一直以固定的速度轉(zhuǎn)動(dòng),所以其轉(zhuǎn)速并未輸出用于分析。在Solid Works軟件motion模塊中轉(zhuǎn)速設(shè)置單位都是RPM,即每分鐘旋轉(zhuǎn)圈速,為方便對(duì)比,下面將RPM轉(zhuǎn)為DPS,即每秒轉(zhuǎn)過(guò)角度,轉(zhuǎn)變關(guān)系為:30RPM=180DPS。轉(zhuǎn)變后,將左右兩個(gè)半軸轉(zhuǎn)速曲線輸出,如圖4所示。
2.3 數(shù)據(jù)分析
若差速器殼體轉(zhuǎn)速為n0, 左半軸轉(zhuǎn)速為n1,右半軸轉(zhuǎn)速為n2,由以上仿真曲線可以得出結(jié)論:
1)左右半軸與差速器殼體轉(zhuǎn)速在所有工況下都滿足關(guān)系:n1+n2=2n0,即兩個(gè)半軸的轉(zhuǎn)速之和等于2倍的差速器殼體轉(zhuǎn)速。
2)直線行駛工況下,左右半軸與差速器殼體的轉(zhuǎn)速相同,n1=n2= n0=180DPS。
3)當(dāng)左側(cè)半軸轉(zhuǎn)速為零時(shí),n1=0,右側(cè)半軸的轉(zhuǎn)速為殼體轉(zhuǎn)速的2倍,n2=2n0。
4)當(dāng)左側(cè)半軸轉(zhuǎn)速為殼體轉(zhuǎn)速一半時(shí),即n1=n0/2= 90DPS,右側(cè)半軸的轉(zhuǎn)速滿足1)中所以得結(jié)論,即n2= 2n0- n1=1.5 n0=270DPS。
3 結(jié)論
通過(guò)本文中,對(duì)托森差速器進(jìn)行了3D實(shí)體建模及運(yùn)動(dòng)仿真分析,可以得出該差速器的左右半軸和差速器殼體的轉(zhuǎn)速,在不同工況下的數(shù)學(xué)關(guān)系如下。在直線行駛的工況下,左右半軸和差速器殼體的轉(zhuǎn)速相同,三者同步旋轉(zhuǎn)。當(dāng)出現(xiàn)轉(zhuǎn)彎或其它路況時(shí),假設(shè)差速器殼體轉(zhuǎn)速不變,其中一個(gè)半軸轉(zhuǎn)速降低時(shí),另外一個(gè)半軸的轉(zhuǎn)速會(huì)出現(xiàn)上升的情況,且二者降幅與增幅是相同的。通過(guò)進(jìn)一步分析,左右半軸和差速器殼體的轉(zhuǎn)速始終滿足一個(gè)關(guān)系,即n1+n2=2n0。在此結(jié)論基礎(chǔ)上,我們可以對(duì)該差速器的速度特性有了準(zhǔn)確的了解,對(duì)差速器的工作方式和工作原理有了進(jìn)一步的掌握。
參考文獻(xiàn)
[1] 趙罘等.Solid Works 2018中文版機(jī)械設(shè)計(jì)從入門到精通.北京:人民郵電出版社,2018.04.
[2] 王歡等.基于Pro/E的越野車托森差速器參數(shù)化設(shè)計(jì).長(zhǎng)春:機(jī)械傳動(dòng),2012.03.
[3] 王歡等.托森差速器中弧齒錐齒輪的三維參數(shù)化建模[J].南京:機(jī)械制造與自動(dòng)化,2012.01.
[4] 侯運(yùn)豐等.托森差速器的傳動(dòng)特性分析[J].天津:機(jī)械設(shè)計(jì),2008.03.
[5] 向麗康. 托森差速器結(jié)構(gòu)與性能[J].北京:世界汽車,1997.01.
