基于計算機視覺的室外停車場車位檢測實驗設計
2019-10-08 06:15:16肖永菲楊玉成余江浩
實驗技術與管理 2019年7期
張 乾,肖永菲,楊玉成,余江浩,王 林
基于計算機視覺的室外停車場車位檢測實驗設計
張 乾1,2,肖永菲1,3,楊玉成1,3,余江浩2,3,王 林3
(1. 貴州民族大學 數據科學與信息工程學院,貴州 貴陽 550025;2. 貴州民族大學 教務處,貴州 貴陽 550025;3. 貴州省模式識別與智能系統重點實驗室,貴州 貴陽 550025)
為便于汽車駕駛員在室外停車場中尋找可用空車位,基于以數據采集、圖像處理和目標檢測等過程的計算機視覺,開發了室外停車場車位檢測實驗。該實驗將Haar-like特征描述和車位中顏色能量變化作為判別模型的數據輸入,選取隨機森林作為車位可用狀態的判別模型。通過在國際公開數據集PKLot上進行實驗,對可用車位的檢測準確率的均在91%以上;在自建的GZMU-LOT上進行實驗,可用空車位的檢測準確率達92.21%。
車位檢測;計算機視覺;實驗設計;室外停車場
城市停車難是令汽車駕駛員苦惱的問題,在停車場中尋找可用車位也是比較困難的。采用現代信息技術快速、準確、醒目地告知駕駛員可用車位的具體位置是一個重要的課題[1]。目前停車場可用車位的檢測方法可歸納為基于傳感器的方法和基于計算機視覺的方法。
基于傳感器的可用車位檢測方法是通過在車位安裝傳感器設備和裝置,采集數據后傳送到后臺服務器,經服務器處理數據后顯示車位的可用狀態信息。基于傳感器的方法又可以分為地感線圈檢測技術[2]、超聲波檢測技術[3]、紅外檢測技術[4]、動態稱重技術[5]、地磁傳感器檢測技術[6]。基于傳感器的方法存在安裝程序繁瑣、硬件成本高等缺點,但也有不易受環境干擾、數據傳輸可靠性高等優點。
基于計算機視覺的可用車位檢測是一種新技術,是通過攝像頭等圖像采集設備對場景進行拍攝獲得圖像并進行數字圖像處理,結合統計模式識別或者深度學習的方法對可用車位進行檢測和顯示。基于計算機視覺的方法又可以分為車位線標記法[7]、雙目立體法[8]、光帶投影法[9]和運動立體測距法[10]等。基于計算機視覺的檢測方法容易安裝、成本低,但是該方法容易受到光照條件的變化、混亂的背景、運動目標的影子、物體與環境之間或者物體與物體之間的遮擋等因素的干擾。由于計算機視覺技術在可用空車位檢測中的方便性,因而受到計算機視覺、模式識別研究人員的關注和重視。
1 可用空車位檢測實驗設計
室外停車場中可用車位的檢測是一種計算機應用工程。本文以計算機視覺理論為基礎,以軟件工程方法為主線,進行停車場可用車位的實驗設計。根據可用車位檢測的目標,實驗設計包括數據采集、區域特征描述、車位可用性判定等環節。
1.1 基于計算機視覺的數據采集和區域特征描述
目前,智能圖像采集設備包括攝像頭、攝像機、錄像機、照相機和智能手機等。通過圖像采集設備對室外停車場場景進行拍攝后,利用計算機視覺算法進行數據分析和挖掘,檢測出圖像中可用的車位信息。基于計算機視覺的室外停車場中可用車位檢測實驗流程如圖1所示。
通過統計模式識別算法對視頻采集到圖像進行可用車位位置的區域統計特征描述是系統實驗的首要關鍵步驟。在可用車位的區域特征描述方面,有小波變換、紋理信息、結構信息等統計方法。在室外停車場環境下,本文充分考慮了車位邊界一般是通過白色的線將車位圈定的實際情況,采用了Haar-like特征[11]作為區域特征描述方法。
Haar-like特征最早應用于人臉檢測和人臉特征描述,是一種經典的圖像統計方法。Haar-like特征經過發展可以歸納為邊緣特征、線性特征、中心特征和對角線特征等4種形式的特征。Haar-like特征模板內只有白色和黑色兩種矩形,在傳統的方法中定義該模板的特征值為白色矩形像素和減去黑色矩形像素和。在室外停車場的可用車位檢測中,該方法體現了車位線和車位內部的對照情況,該特征描述方法具有可行性。本文在傳統的Haar-like加入顏色能量變化特征,形成8種Haar-like原子結構,如圖2所示。
1.2 車位可用性判定
采用集成學習的隨機森林[12]方法判定車位的可用狀態。隨機森林是一種經典的集成學習方法,通常情況下,該方法以決策樹作為基元模型:
隨機森林通過在樣本實例和樣本屬性上兩個過程上隨機采樣的策略,有效控制了模型的過擬合風險。
2 實驗仿真與結果
2.1 實驗環境和實驗數據集
實驗環境為戴爾Inspiron 15-7560筆記本電腦,CPU為Intel i7-7500U,Windows 10 64位旗艦版操作系統,Matlab R2018a,openCV,索尼(SONY)HDR- CX680攝像機。
在室外停車場中,公開的可用車位檢測數據集為數不多,據調研僅有PKLot[13]、CNRPark-Ext[14]、FMPH[15]等3個。本文選擇其中的PKLot作為實驗數據集之一。另外,從貴州民族大學花溪校區停車場錄制了大量視頻作為實驗素材,構成了GZMU-LOT數據集。
(1)數據集PKLot。PKLot數據集發布于2015年,是計算機視覺、模式識別和智能交通領域公開測試的基準數據集之一。該數據集由2個停車場的圖片組成,一個是PUCPR行政大樓前(簡稱PUCPR),另一個位于UFPR前面,后者由2個攝像機從不同角度拍攝,因此其分解為UFPR04和UFPR05兩數據子集,圖像的分辨率均為1280×720像素。圖像拍攝的天氣環境包括陰天、陰雨、晴天以及光照變化等,由于圖像環境的復雜性,該數據集被作為可用空車位檢測的基準數據集之一。
(2)數據集GZMU-LOT。GZMU-LOT是課題組在貴州民族大學花溪校區停車場,經過長時間錄制和拍攝建設的一個用于室外停車中可用車位檢測實驗的數據集。目前,GZMU-LOT錄制季節包括夏天、秋天和冬天,錄制時段包括這3個季節中的部分時段的24 h,天氣情況包括了晴天、霧、雨、陰天、雪天等天氣狀況。如果地面積雪將車位線覆蓋,基于計算機視覺的方法將失效。
2.2 實驗結果評價指標




在以上定義基礎上,有:
和
2.3 結果
2.3.1 數據集PKLot
在PKLot數據集中有UFPR04,UFPR05和PUCPR等3個數據子集,基本情況如表1所示。
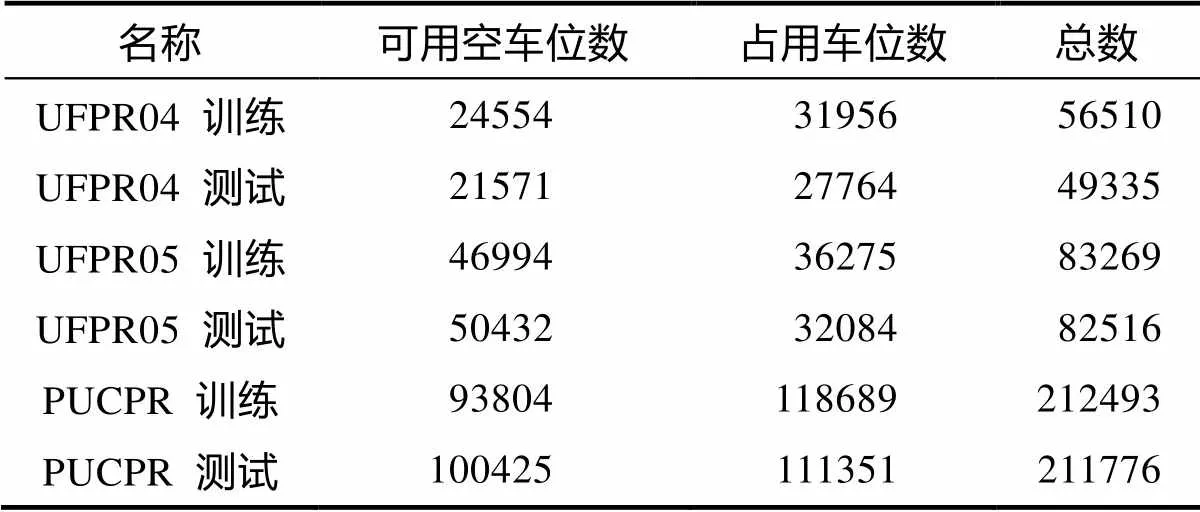
表1 PKLot數據基本情況 個
在UFPR04、UFPR05、PUCPR的訓練集和測試集中,隨機選擇各自其中50%作為訓練構建模型,余下的50%作為測試集,分別獨立重復2次實驗,分別記為UFPR04a,UFPR04b,UFPR05a,UFPR05b,PUCPRa和PUCPRb。在Haar-like作為特征、隨機森林作為分類器的統計模式識別和計算機視覺實驗手段下,得到表2所示的結果。
通過表2可以看出,最高的準確率為99.21%,最低的準確率為91.11%,均保證在90.00%以上。為進一步可視化實驗效果,在PUCPR數據集上的實驗效果如圖3所示。

表2 在PKLot上實驗結果

圖3 在PUCPR數據集上實驗效果圖
2.3.2 數據集GZMU-LOT
GZMU-LOT包含多因素影響下同一停車場的車位情況,從該視頻集中3個季節、不同天氣、不同時段等因素中選取5000張圖像進行實驗,圖像大小為1920×1080像素。在實驗中隨機選擇20%,40%和50%作為訓練集,剩下的全部作為測試集的實驗參數配置方案進行,得到如表3所示的結果。可視化效果如圖4所示。

表3 在GZMU-LOT上實驗結果
注:圖像總數5000張
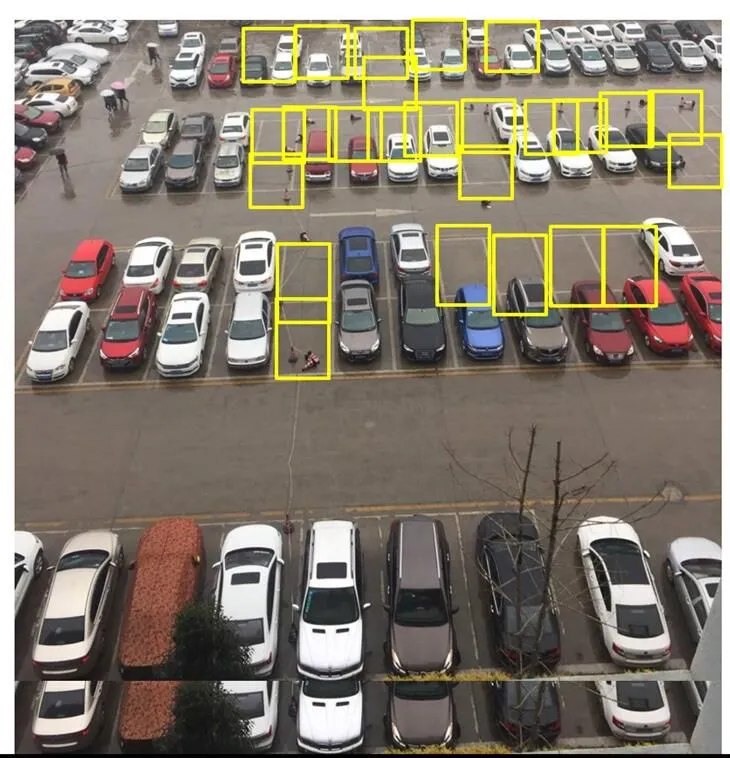
圖4 在GZMU-LOT數據集上實驗效果圖
3 結語
利用計算機視覺和統計模式識別技術和PUCPR數據集、GZMU-LOT數據集進行復雜停車場可用車位實驗,實驗結果表明該方法具有可行性和高效性。該成果將轉化到智能停車軟件系統、微信公眾號、手機APP等新媒體上。
[1] 安旭驍,鄧洪敏,史興宇.基于迷你卷積神經網絡的停車場空車位檢測方法[J].計算機應用,2018(4): 935–938.
[2] 王志超,劉波,湯亮,等.基于地磁感應的新型無線車輛檢測器設計[J].計算機測量與控制,2014(11): 3837–3839.
[3] 何偉.基于超聲波傳感器的自動泊車車位補償檢測法[J].中國儀器儀表,2016(2): 47–50.
[4] 楊衛,李波,孫喬,等.基于熱釋電紅外傳感技術測距的時間差法研究[J].傳感器與微系統,2013(4): 37–40.
[5] 沈裴裴,徐志玲,陳群,等.車輛動態稱重模型建立與分析[J].測控技術,2015(3): 5–8.
[6] Mohd Sufiz I. Attendance Free Parking Counter Using Microprocessor With Magnetic Sensor[R]. Utem, 2009.
[7] TSCHENTSCHER M, KOCH C, KONIG M, et al. Scalable real-time parking lot classification: An evaluation of image features and supervised learning algorithms[C]// International Joint Conference on Neural Networks (IJCNN), IEEE.2015: 1–8.
[8] KAEMPCHEN N, FRANKE U, OTT R. Stereo Vision Based Pose Estimation of Parking Lots Using 3D Vehicle Models[C]// Intelligent Vehicle Symposium, IEEE.2002: 459–464.
[9] JUNG H G, KIM D S, YOON P J, et al. Light Stripe Projection Based Parking Space Detection for Intelligent Parking Assist System[C]// Intelligent Vehicles Symposium, IEEE.2007: 962– 968.
[10] SUHR J K, JUNG H G, BAE K, et al. Automatic Free Parking Space Detection by Using Motion Stereo-based 3D Reconstru-ction[J]. Machine Vision & Applications, 2010, 21(2): 163–176.
[11] JIANG S, NING J, CAI C, et al. Robust Struck tracker via color Haar-like feature and selective updating[J]. Signal, Image and Video Processing, 2017, 11(6): 1073–1080.
[12] 張乾.基于隨機森林的視覺數據分類關鍵技術研究[D].廣州:華南理工大學,2016.
[13] De ALMEIDA P R L, OLIVEIRA L S, BRITTO Jr A S, et al. PKLot–A robust dataset for parking lot classification[J]. Expert Systems with Applications, 2015, 42(11): 4937–4949.
[14] AMATO G, CARRARA F, FALCHI F, et al. Deep learning for decentralized parking lot occupancy detection[J]. Expert Sys-tems with Applications, 2017, 72: 327–334.
[15] VIJAY P, HASAN F, JOHAN H, et al. Smart parking sensors, technologies and applications for open parking lots: a review[J]. IET Intelligent Transport Systems. 2018, 22(8): 735–741.
Experimental design of parking space detection in outdoor parking lot based on computer vision
ZHANG Qian1,2, XIAO Yongfei1,3, YANG Yucheng1,3, YU Jianghao2,3, WANG Lin3
(1. School of Data Science and Information Engineering, Guizhou Minzu University, Guiyang 550025, China; 2. Academic Affairs Office, Guizhou Minzu University, Guiyang 550025, China; 3. Key Laboratory of Pattern Recognition and Intelligent Systems of Guizhou Province, Guiyang 550025, China)
In order to facilitate the driver to find the available empty parking space in the outdoor parking lot, based on the computer vision of data acquisition, image processing and target detection, an outdoor parking space detection experiment is developed. In this experiment, Haar-like feature description and color energy change in parking space are used as data input of discriminant model, and random forest is selected as discriminant model of parking available state. Through the experiments on the international open data set PKLot, the detection accuracy of available parking spaces is more than 91%, and the experiments on the built GZMU-LOT show that the detection accuracy of available parking spaces is 92.21%.
parking space detection; computer vision; experimental design; outdoor parking lot
TP391.41
A
1002-4956(2019)07-0138-03
10.16791/j.cnki.sjg.2019.07.033
2019-01-13
國家自然科學基金項目(61802082,61263034,61762020);貴州省科技廳計劃基金項目(黔科合J字[2014]2094號);貴州省教育廳創新群體重大研究項目(黔教合KY字[2018]018);貴州省教育廳自然科學基金項目(黔教合KY字[2017]129);教育部產學合作協同育人項目(201702044007);貴州省科技廳聯合基金項目“基于計算機視覺的停車場智能收費系統研究”(黔科合J字[2014]7390)
張乾(1984—),男(苗族),貴州貴定,博士,副教授,主要研究方向為圖像處理、模式識別和機器學習.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
科技傳播(2019年22期)2020-01-14 03:06:34
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
消費導刊(2017年20期)2018-01-03 06:26:40
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
