圖像復(fù)原用的一種改進(jìn)的最大熵法
2019-10-08 05:48:08王吉會(huì)
電子技術(shù)與軟件工程 2019年15期
文/王吉會(huì)
1 圖象退化模型
所研究的圖象復(fù)原是圖1的模型為基礎(chǔ)的。
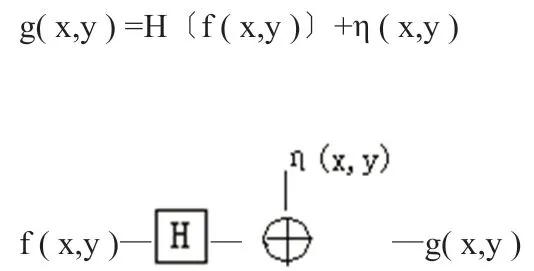
當(dāng)H為一線性算子時(shí),有:
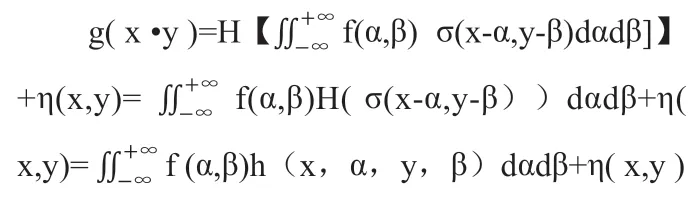
其 中:h(x,α,y,β)=H〔δ (x —α,y—β)〕當(dāng)h(x,α,y,β)是位置不變的時(shí),則:
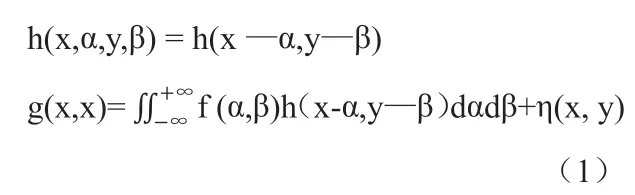
為了方便清楚明了,將二維圖象分解為一維序列。這樣(1)式可以表示為:

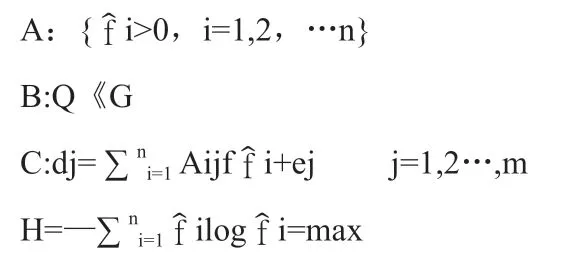
其中:{ej}是均值為零的白噪聲。 {fi}為原始圖象。
{dj}污染后的圖象。{Aij}是傳遞函數(shù)。
2 傳統(tǒng)最大熵復(fù)原法
2.1 圖像的熵
圖像的熵是一種圖像信息量的表示方法,代表了圖像的平均信息量。離散分布(3)的熵為:

當(dāng)F=常數(shù)時(shí),則H1=max與H= —Σfilogfi = max一致,因?yàn)镠= max,必然有H1=max。故令熵的
另外還有一種Burg熵,因其使用的狹隘性,本文就不在此贅述了。
2.2 傳統(tǒng)的最大熵復(fù)原方法
傳統(tǒng)的最大熵復(fù)原方法主要是從頻譜關(guān)系考慮和利用最大熵法復(fù)原。
設(shè)Sg(U,v),Sf(u,v),Sη(u,v)分別代表模糊圖象、原圖象、噪聲的功率譜密度.
則它們有:

現(xiàn)在,我們要尋找一個(gè)譜均衡器P(u,v),使g(x,y)通過(guò)它時(shí),能得到輸出Sf(u,v)
不難看出,(6)式中要用到g(x,y)的功率譜,估計(jì)Sg(u,v)時(shí),可以利用最大熵法。
第二:從時(shí)域,利用優(yōu)化方法來(lái)求。
值問(wèn)題3再利用#優(yōu)法求極值,得出最大熵法情況下的復(fù)原圖象。
以上兩種方法均有缺點(diǎn)。第一種方法Sf(u,v)較難求。第二種方法尋優(yōu)困難。用最速下降法尋優(yōu),其步長(zhǎng)又難以選擇。用共扼方向法尋優(yōu),復(fù)雜度高。用近視法,則降低了精度。
3 改進(jìn)的最大熵法
3.1 最大熵復(fù)原應(yīng)滿足的約束條件
而且,fi>0 i=1、2、…、n
椐拉格朗日乘子法,我們建立目標(biāo)函數(shù)為:

其中:λ為拉格朗日除子。
下面我們求目標(biāo)函數(shù)的極大值。
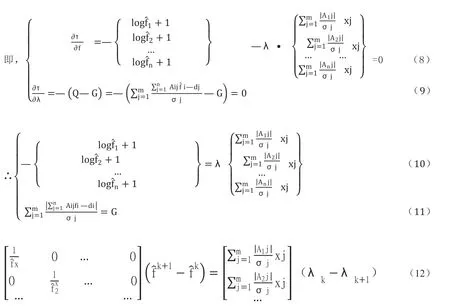
令:J=max,則需使:J’=0 所以‘有
如式(8)(9)(10)(11)所示。
滿足(10),(11)的f即是J的駐點(diǎn),是候選的最大值點(diǎn)。
3.2 J的凹凸性證明
定理:當(dāng)入>0時(shí),J是嚴(yán)格上的凸函數(shù)。據(jù)上述定理,當(dāng)入>0時(shí),滿足(10),(11)的f就是J最大值點(diǎn),即我們要得的復(fù)原圖象。
3.3 遞推公式
因?yàn)楫?dāng)η很大時(shí),我們不能直接由(10),(11)解出f,所以,要通過(guò)別的途徑。在此我們利用遞推法。將(10)式兩邊求引,并賦以遞推序號(hào),得:如式(12)所示。
由(12)得遞推公式為:

綜上,遞推求f時(shí)應(yīng)先按(13),后按(11)式求。即滿足:

3.4 初值
令入=0,由(10)得出f的初值為=e-1,i=1、2、…n
用此數(shù)值作為迭代初值復(fù)原出來(lái)的圖象精度高。而任選一初值,則或者迭代后產(chǎn)生的圖象精度太低,或者得出負(fù)圖像,等等。
3.5 算法的收斂性
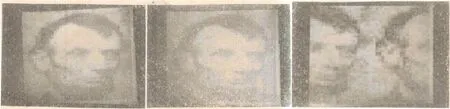
圖1
據(jù)泰勒公式,有:如式(15)所示。
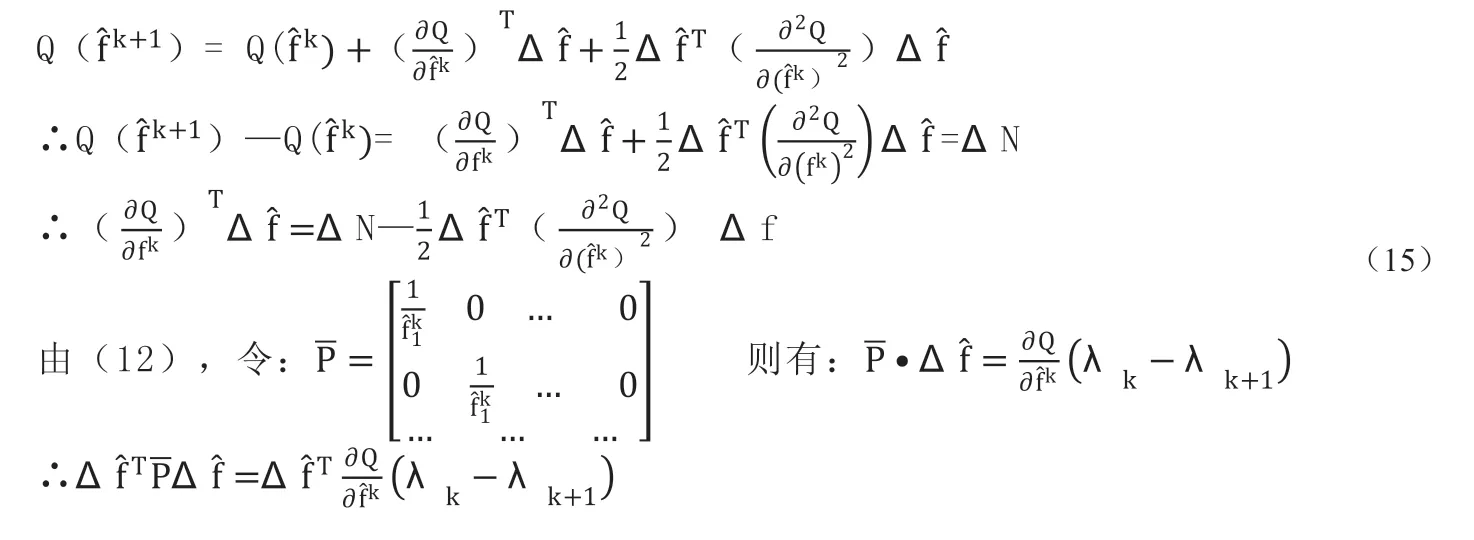
上式兩邊分別轉(zhuǎn)置,得:

代入(15),得:
令:x1=ΔfTPΔf

則可知,X1>0,當(dāng)ΔL>0,ΔN<0,∴x2<0
因此,這時(shí)(16)式成為:
綜上,當(dāng)Q(fk)>G時(shí)(這時(shí)ΔL>o),下一步要求λk + 1比λk大,才能保證,Q(fk+1)比Q(fk)更接近于門限值G。而Q(f°)>G,(因?yàn)閒i≤1),所以此算法收斂。因此,我們得到結(jié)論: 若我們選擇門限值m1<G<m2,按(11),(13)式我們一定可得到復(fù)原圖象。其中:mi =m- m /10。 m2==m + m/10,這是我們實(shí)驗(yàn)中得到的。mi,m2不能選得間隔太大或太小。如果太大,則復(fù)原精度低;而太小,則復(fù)原速度慢。
4 算法與結(jié)論
根據(jù)以上理論指導(dǎo),我們編寫了相應(yīng)的程序,進(jìn)行了實(shí)驗(yàn)。通過(guò)實(shí)驗(yàn)我們得知,“改進(jìn)的最大熵法”比傳統(tǒng)的最大化熵法復(fù)原速度快,精度高。
5 實(shí)驗(yàn)結(jié)果
實(shí)驗(yàn)結(jié)果如照片如圖1所示。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2020年6期)2020-07-25 02:31:36
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2018年9期)2018-09-26 05:59:44
瘋狂英語(yǔ)·新讀寫(2018年2期)2018-09-07 09:32:10
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34