核電站主泵法蘭連接螺栓超聲檢測控制系統設計
2019-09-27 05:04:56陶澤勇周路生裴方晟趙曉艷
制造業自動化 2019年9期
陶澤勇 ,趙 琛,周路生,裴方晟,趙曉艷
TAO Ze-yong1 ,ZHAO Chen1,ZHOU Lu-sheng1,PEI Fang-sheng1,ZHAO Xiao-yan2
(1.國核電站運行服務技術有限公司,上海 200233;2.江蘇省水文水資源勘測局揚州分局,高郵 225600)
0 引言
核電站主泵法蘭連接螺栓是作為連接主泵和法蘭盤之間的緊固件,長期在高溫高壓輻照等在役環境下使用時,易形成疲勞損傷等各種缺陷,影響核電站運行安全,為保證其可靠性,在ASME規范規定下,需對主泵法蘭連接螺栓進行在役檢查,以排除其安全隱患[1]。
傳統手動超聲檢測方式,存在檢測效率低、漏檢率高和耗費大量人力物力等問題,且難于適應主泵法蘭連接螺栓檢測的可靠性高、標準嚴格等要求[2,3]。為增強檢測自動化程度同時提高檢測結果可靠性,減少操作人員輻射傷害,通過對被檢測的反應堆主泵法蘭連接螺栓材質、尺徑、形狀、各類影響在役使用性能的缺陷等進行了解,根據主泵法蘭連接螺栓自動超聲檢測機械裝置的檢測需求,設計了一套可進行核電站主泵在線超聲檢測的控制系統。
1 自動檢測系統組成及特點
1.1 機械裝置本體
主泵法蘭連接螺栓超聲檢測運動控制機械裝置如圖1所示,由軌道、滑座、公轉驅動組件、徑向驅動組件、傾斜自適應調整彈簧組件、徑向微調組件和超聲檢測組件等組成,驅動選用MAXON RE系列有刷伺服電機,額定電壓為48V。

圖1 機械裝置本體
機械裝置通過快接裝置、定位銷快速安裝于主泵泵殼外壁。公轉驅動組件用于對超聲掃查裝置沿主泵泵殼外壁進行周向移動,達到全面掃查主泵法蘭連接螺栓的目的;徑向驅動組件用于超聲掃查裝置沿主泵泵殼外壁對主泵法蘭連接螺栓進行超聲檢測,完成主泵法蘭連接螺栓的周向掃查和徑向掃查;傾斜自適應調整彈簧組件固定于公轉驅動組件上,實現超聲探頭掃查過程的徑向微調。各組件的傳動采用絲桿轉動和螺母移動方式進行,之間相互配合,根據上位機控制命令,完成對伺服電機的精確控制,達到各主泵螺栓超聲檢測的目的。
1.2 自動檢測系統組成
主泵法蘭連接螺栓自動超聲檢測系統的控制主要是利用GALIL DMC-2183運動控制器實現對機械裝置的各動力部件——伺服電機的精確控制,保證檢測裝置按照預定的掃查策略進行相應的運動操作,其超聲檢測控制系統總體方案框圖如圖2所示。系統以超聲探頭和數字超聲檢測儀構成的超聲數據采集系統為基礎,以工控機為控制核心,輔以驅動機械載體組成整套超聲檢測系統,實現對核電站主泵法蘭連接螺栓缺陷自動超聲檢測。系統根據所檢測的主泵法蘭連接螺栓選擇掃查策略,確定掃查參數,通過上位機控制軟件發送控制指令驅動機械裝置各行走機構直流伺服電機的運動,同時,超聲數據采集系統對超聲探頭采集到的主泵法蘭連接螺栓數據信息進行處理后,再在顯示器上顯示出來,分析處理后形成缺陷檢測數據報告[4~6]。

圖2 超聲檢測系統方案框圖
系統各驅動機構所對應直流伺服電機的控制采用PWM脈寬調制方式進行,通過控制算法,讀取各伺服電機編碼器反饋值來調節電機轉速、轉向和啟停,形成一個PID閉環控制系統,確保檢測組件的精確定位,同時避免掃查器運行狀態的不穩定引起主泵法蘭連接螺栓缺陷誤檢、漏檢以及損傷機械裝置等情況的發生,保障了超聲檢測系統的高穩定性、高準確性。
2 控制系統模塊設計
控制系統以虛擬儀器語言LabVIEW為軟件開發平臺,以面向對象的G語言編程方式進行設計,具有模塊化、開發快速、穩定靈活等特點[7,8]。采用LabVIEW編寫控制程序,上位控制計算機和Galil運動控制卡之間通過TCP/IP進行網絡通信。Galil運動控制器包含了兼容LabVIEW的API接口程序,并提供了一些簡單易用的功能VI和動態鏈接庫DLL供調用。
2.1 網絡通訊模塊
控制系統與機械裝置之間需要實時進行信息交互,各驅動行走機構、探頭調整機構的數據均需準確且及時的傳輸給控制系統,實現控制系統對各驅動系統、數據采集系統的實時管理。在LabVIEW環境下實現上位機和Galil控制卡之間通信通常有兩種方式,一種是調用DMC32.dll動態鏈接庫,另一種是通過調用ActiveX工具包DMCOCX32。本系統采用ActiveX技術實現控制PC和Galil控制卡之間的網絡通信,下位機接收上位機發送的數據指令,同時完成各傳感器采集數據的反饋[9,10]。其通信程序框圖如圖3所示。

圖3 通信程序框圖
LabVIEW采用ActiveX自動化技術實現與Galil運動控制卡程序的鏈接,通過屬性節點進行運動控制器的序列號和IP選擇,設置屬性節點connection,調用屬性節點command完成上位機和Galil運動控制卡的通信,上位機指令便可從command接口發送控制命令至Galil,實現指定掃描策略的運動,傳輸采集數據,應用上位機控制軟件中的文件保存模塊進行原始數據處理與保存,以供后續查詢和調用。
2.2 探頭調整機構模塊
探頭調整機構的目的在于更為精確進行主泵法蘭連接螺栓缺陷檢測,讓超聲探頭進行左右、前后、轉角、環繞等掃查運動時,超聲探頭在調整機構的作用下始終以最佳狀態貼于主泵法蘭連接螺栓內壁[9,10]。檢測組件中探頭矯正機構啟動后,位置傳感器在每一采樣時刻接收期望位置與實際位置的偏差量,控制器將根據偏差位置加以邏輯控制處理,控制絲桿螺母驅動電機沿螺栓軸向運動來調整位置偏差,運行過程無需任何指令輸入,直至完成一次完整的超聲檢測掃查軌跡曲線,具體實現如圖4所示。
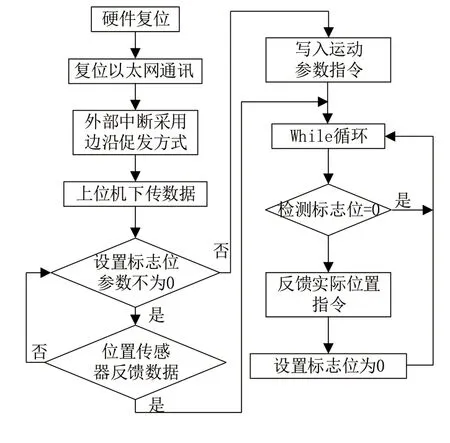
圖4 探頭調整機構控制流程
2.3 狀態顯示模塊
當用戶發送指令到控制系統中時,自動檢測裝置運行狀態數據也必須動態的顯示在前面板界面上,用戶便可對指定軸電機轉速、轉向、扭矩,以及單螺栓掃查進度等信息進行觀測和分析,通過調用SendCommand.VI快速做出相應操作,提高檢測精度和效率[11~13]。在掃查過程中,通過command接口向Galil卡發送“TPA”、“TTA”指令實時查詢A軸當前位置和扭矩信息。定時器開始計數時,調用DMC Command()實現數據讀取,上位機每隔10ms在界面上進行采集數據刷新顯示[14],當運動軸出現異常,將以布爾燈紅色閃爍提醒,數據顯示程序如圖5所示。

圖5 數據顯示程序
3 控制軟件功能設計
自動掃描控制裝置是主泵法蘭連接螺栓超聲檢測控制系統的核心,以現代超聲檢測技術、數字信號處理技術、超聲成像技術以及機電一體化技術開發了核電站主泵法蘭連接螺栓超聲檢測控制系統和數據采集系統。
3.1 系統軟件界面
主泵法蘭連接螺栓超聲檢測控制系統主要具有以下功能:界面圖像顯示、人機交互、電機閉環控制、探頭機構調整等。從程序實現上,應包括:參數設置、掃描方式設置、數據處理、數據顯示、進度顯示和報警處理等,如圖6所示。

圖6 系統軟件界面功能設計
系統軟件運行前初始化系統各參數值,再確定掃描速度、方式和路徑等數據,建立網絡通訊,掃描圖像和數據文件顯示于人機界面上,并通過傳感器反饋伺服電機狀態,同時將掃描數據和掃查參數進行文件存儲,方便后續檢測人員調用和查詢,若出現掃查異常,將進行急停處理,并報警通知操作人員,防止出現檢測裝置和主泵法蘭連接螺栓的損傷。上位機控制部分采用筆記本電腦,GALIL DMC-2183八軸運動控制器、放大器模塊AMP-20540和AMP-20440、電源等元件模塊化安裝于便攜控制箱中,方便攜帶和接線,便攜控制箱通過航空插頭、電源接口與現場機械裝置本體進行伺服電機、編碼器、傳感器等連接。控制系統人機界面如圖7所示。

圖7 人機界面
在上位機人機界面上,用戶可以清晰直觀的觀察掃描進度和運行狀態,協調控制主泵法蘭連接螺栓超聲檢測系統和超聲數據采集系統,相互配合,實現超聲掃描和超聲數據采集的自動化,并進行缺陷分析、處理和定位,若自動檢測過程中對某部位檢測圖像、數據有疑慮,可手動選擇探頭掃描范圍進行來回掃描,以提供準確可靠的檢測數據[15]。控制界面操作方式分為手動掃查和自動掃查,默認選擇手動掃查方式,手動掃查操作可進行周向、軸向速度調節,軸向上移、下移和周向順時針、逆時針轉動控制。自動掃查操作可實現橫向步進掃查和縱向步進掃查,根據預設參數、規劃路徑進行來回步進掃查,實時顯示升降電機、轉動電機的扭矩和當前被檢螺栓掃查進度,并實現對缺陷位置進行精確定位,操作人員可根據檢測需求進行模式切換。
3.2 控制程序
具體編程時,針對不同檢測內容制定預設掃描策略和掃描路徑,先掃查路徑的每段當量步長距離移動,通過軟件插補運算和時鐘中斷服務程序實現精確插補運行控制,形成步進脈沖,直到掃查至預設掃查路徑限定位置,完成插補,系統檢測停止[16]。檢測掃查流程如圖8所示。

圖8 檢測系統掃查流程圖
4 結語
對于該核電站主泵法蘭連接螺栓的超聲檢測控制系統的研究設計,目前該檢測系統的基本功能、控制系統穩定性、檢測效率精度等均能滿足核電站相關超聲檢測應用測試,滿足RSEM標準要求,能夠確保核電站核電站主泵法蘭連接螺栓的運行安全。在對主泵法蘭連接螺栓進行超聲檢測時,通過優化機械和控制系統、掃查方式,缺陷的檢測和定量,信號的采集和分析,合理搭配超聲檢測組件,能夠充分發掘該超聲檢測系統的功能,有利于主泵法蘭連接螺栓檢測業務的發展,為后續應用于其他行業的類似大型螺栓檢測提供了技術基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
