基于六棱臺全張量磁梯度探頭的目標定位方法*
2019-09-27 01:48:04于振濤
艦船電子工程 2019年9期
關鍵詞:測量
丁 彪 胡 迪 于振濤
(1.海軍航空大學教務處 煙臺 264001)(2.海軍潛艇學院遙感所 青島 266041)
1 引言
海洋中的艦船目標大多由鋼鐵等材料建造而成,放置于地磁場中會發生磁化,從而改變原地磁場的分布,磁性目標定位技術[1~2]通過測量目標磁化產生的磁場而對目標進行定位。目前常見的磁傳感器主要有磁阻磁力儀、光泵磁力儀和磁通門磁力儀等,隨著測量技術的發展,超導磁力儀作為一種高靈敏度的磁場測量儀器得到了迅速的發展,利用超導磁力儀來搭建全張量磁梯度探頭也得到了研究,吉林大學的申茂冬[3~4]對基于超導磁力儀的五棱臺式全張量磁梯度探頭進行研究,提出了一種五棱臺側面傾角的優化方法。李萌[5]對基于超導磁力儀的全張量探頭的結構進行設計,提出了一種六方金字塔形的探頭結構。海軍工程大學的趙建揚[6]對基于超導磁力儀的全張量磁梯度探頭存在的不平衡度干擾進行補償,取得了較好的效果。
由目前的研究進展可以看出,目前基于超導磁力儀的全張量磁梯度探頭尚處于系統的搭建階段,缺乏相關的關于目標的定位方法的研究,本文提出了一種基于六棱臺全張量磁梯度探頭的磁性目標定位方法,首先建立了六棱臺傳感器分布的幾何模型,然后計算了傳感器測量值與磁梯度張量值之間的關系,最后提出了目標定位方法。最后通過仿真實驗分析,對本文提出的基于六棱臺全張量磁梯度探頭的定位方法進行驗證。
2 基于磁梯度張量的定位方法
2.1 磁梯度張量測量原理
全張量磁梯度探頭中單個超導磁力儀的測量值為當地地磁場與目標產生的磁場兩個矢量之間的疊加,由于地磁場的梯度很小(最大為0.02nT/m),遠小于目標產生的磁場梯度,因此可以通過對測量值進行差分來消除地磁場的干擾,因此計算得到磁梯度張量主要由目標引起。
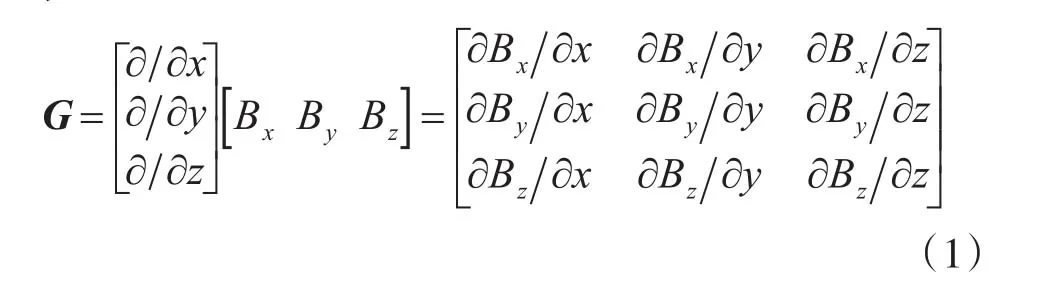
式中,G為磁梯度張量,B為磁場的矢量值。
2.2 六棱臺全張量磁梯度探頭的幾何結構與測量原理
六棱臺式全張量磁梯度探頭由六個平面超導磁梯度計和三個超導磁強計構成,其幾何結構示意圖如圖1所示,由圖1所示,六個平面超導磁梯度計分別布置于六棱臺的六個側面上,平面超導磁梯度計的測量基線位于側面上下兩個邊中點的連線上,利用六個平面超導磁梯度計的測量值可以求得磁梯度張量的各個分量,三個超導磁強計放置于六棱臺的頂面上,其中磁強計的測量軸線兩兩正交。

圖1 六棱臺式全張量磁梯度探頭幾何結構圖
下面通過六個平面的超導磁梯度計來計算磁梯度張量的值,建立笛卡爾三軸正交坐標系如圖2所示,OX軸與OY軸放置于六棱臺的底面位置處,坐標原點O位于底面的中心點位置處,OZ軸垂直于底面向上,對六棱臺的六個側面分別進行編號,記作i,取值依次為1、2、3、4、5、6,每個側面的正交坐標系如圖2所示。i號側面與底面之間的夾角記為θi,i號側面上的坐標系oxi軸在底面上的投影與OX軸之間的夾角為φi,由此可以得出坐標系OXYZ與i號側面坐標系oxiyizi之間的關系如下所示:由此可得i號側面上測量的磁場梯度與六棱臺探頭測量的磁梯度張量各個分量之間滿足的關系如下:
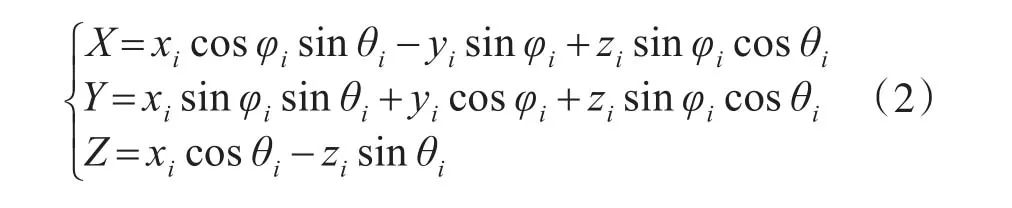
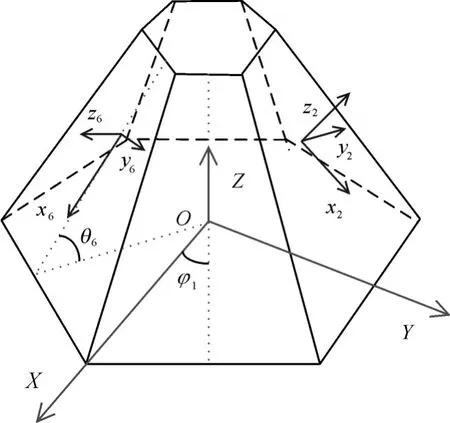
圖2 直角坐標系示意圖

式(3)中,Gi為i號側面上測量的磁場梯度,BX、BY、BZ分別為探頭坐標系OXYZ下的磁場三分量,BXX、BXY、BXZ、BYY、BYZ分別為探頭坐標系OXYZ下的五個相互獨立的磁梯度張量分量,則由式(3)可得,通過6個側面可以列出6個關于磁梯度張量各個分量的一次方程,而磁梯度張量的9個分量當中只有5個是獨立的,因此可以列出關于磁梯度張量5個獨立分量的線性方程組,通過求方程組可以得到磁梯度張量各個分量的最小二乘解。設通過6個側面上測量的磁場梯度與六棱臺探頭測量的磁梯度張量分量之間建立如下關系:
則上式中,M為6×5的參數矩陣,矩陣中各個元素的值與角度θi和φi有關,由式(4)求廣義逆可以求得磁梯度張量的5個獨立分量。
由式(5)可以求解出磁梯度張量的各個分量值。
2.3 六棱臺全張量磁梯度探頭的定位原理
目前較為常見的一種定位方法是Nara提出的基于歐拉反演的定位方法[7-12],該方法的目標位置計算公式如下所示:

式(6)中,通過測量目標產生的磁梯度張量和磁場的三個分量可以實時得到目標的位置,實現對目標的定位。由式(5)可得,利用探頭測量值可以計算得到磁梯度張量的9個分量,同時圖1所示,六棱臺的頂面上有三個超導磁強計可以測量磁場的三個分量,因此六棱臺全張量磁梯度探頭可以實現對目標的實時定位。
3 基于六棱臺全張量磁梯度探頭的目標定位仿真
根據Nara提出的基于歐拉反演的定位方法,利用本文所述的六棱臺全張量磁梯度探頭,對磁性目標的定位進行仿真分析,假設在不考慮磁場噪聲的情況下,影響目標的定位精度的因素主要有:1)探頭與目標之間的距離;2)超導磁強計的精度;3)平面超導磁梯度計的基線長度。
首先設定仿真的初始條件如下所示:建立如圖2所示的直角坐標系OXYZ,假設磁性目標的磁矩為m=(1000,-30000,20000)Am2,目 標 位 于Z=27m的平面上,假設目標沿著直線Y=8m的直線平移,平面超導磁梯度計的基線長度設為10cm,超導磁強計的精度為1pT。
1)探頭與目標之間的距離對目標定位誤差的影響
按照初始條件下對目標定位進行仿真,仿真結果如圖3所示,由圖3可得,當目標距離探頭較近時,定位誤差相對較小,隨著探頭與目標之間的距離增加,定位誤差的波動不斷增大,因此對于遠距離的目標,六棱臺全張量磁梯度探頭的定位誤差較大。通過初始條件下的仿真分析可得,六棱臺全張量磁梯度探頭可以實現對目標的精確定位。

圖3 原始條件下探頭對目標的定位誤差
2)超導磁強計的精度對磁性目標定位誤差的影響
為了仿真分析超導磁強計的精度對目標定位的影響,將精度由1pT提高到0.1pT,其余的仿真條件不變,仿真分析目標的定位誤差如圖4所示。

圖4 超導磁強計的精度對目標定位誤差的影響
由圖4可得,當超導磁強計的精度提高到0.1pT時,目標的定位誤差顯著減小。精度為0.1pT的定位誤差始終小于精度為1pT的定位誤差,且精度為0.1pT的定位誤差最大為3.7m,因此可以得出,可以通過提高超導磁強計的精度來實現對遠距離目標的精確定位。
3)平面超導磁梯度計的基線長度對磁性目標定位誤差的影響
為了仿真分析平面超導磁梯度計的基線長度對目標定位的影響,將平面超導磁梯度計的基線長度由0.1m減小到0.08m,其余的仿真條件不變,仿真分析目標的定位誤差如圖5所示。
由圖5可得,當平面超導磁梯度計的基線長度減小到0.08m時,對近距離目標的定位誤差沒有明顯的變化,而對于遠距離的目標定位誤差波動較大。而平面超導磁梯度計的基線長度為0.1m時,對于近距離和遠距離目標的定位誤差波動都較小,因此,平面超導磁梯度計的基線長度越長,對遠距離目標的定位精度越高。
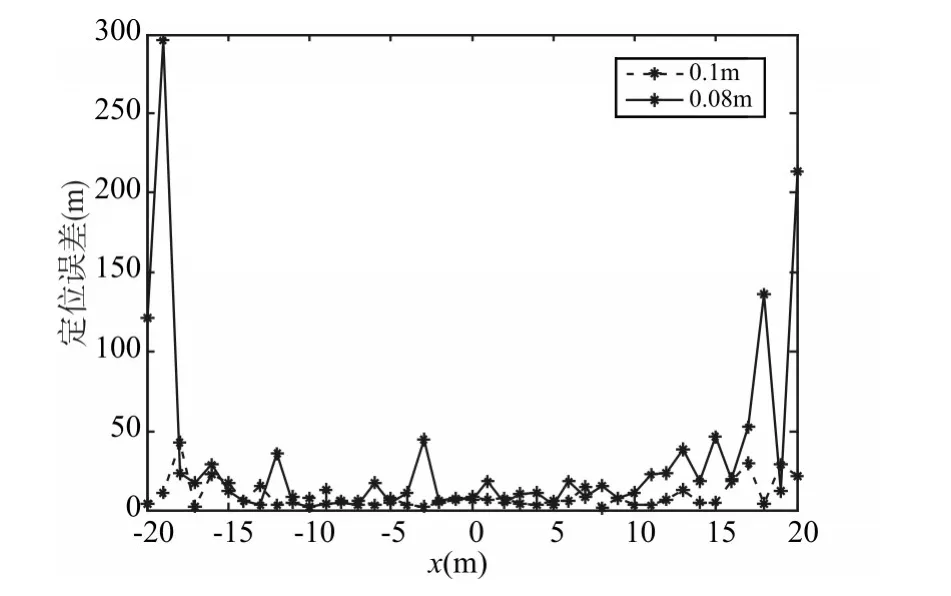
圖5 平面超導磁梯度計的基線長度對目標定位誤差的影響
4 結語
本文提出了一種基于六棱臺全張量磁梯度探頭的磁性目標定位方法,該方法首先建立了六棱臺傳感器分布的幾何模型,然后利用超導磁力儀和超導磁梯度計構建六棱臺全張量磁梯度探頭,通過六個側面的超導磁梯度計測量值求得磁梯度張量的各個分量值,最后通過單個測量點的磁梯度張量與磁場測量值實現對目標的定位。文章最后設計了仿真實驗對本文提出的六棱臺全張量磁梯度探頭的磁性目標定位方法進行仿真驗證,仿真結果可得,本文提出的定位方法定位精度高,影響定位效果的主要因素為超導磁力儀的測量精度和探頭與目標之間的距離。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00