軍用水下滑翔機技術方案研究*
2019-09-27 01:35:40鄧鵬李偉丁浩
艦船電子工程 2019年9期
關鍵詞:系統
鄧鵬李偉丁浩
(海軍潛艇學院戰略導彈與水中兵器系 青島 266199)
1 引言
水下范圍的無人自主航行器(AUV)在過去幾十年從無到有已經發展出很多類型,囊括從基本的數據采集設備到高度復雜的無人水下航行器(UUV)。水下滑翔機作為UUV中的一類,因其特有的動力系統而具備超長的水下工作時間,隨著自控技術的進步,UUV自主能力的提高,水下滑翔機逐步體現出其軍用和商用價值。水下航行器通過調節載體自身浮力來,為載體提供上浮和下潛動力,水下滑翔機在載體浮力以及滑翔翼的作用下,產生向前的水平滑翔速度。水下滑翔機的典型軌跡如圖1[1],鋸齒型的軌跡類似滑翔機一樣在海洋環境中反復下降上升。在鋸齒運動的過程中,航行器裝載的傳感器和數據采集系統持續記錄海洋的傳導性、溫度和深度等海洋數據。在水下滑翔機浮出水面后通過衛星將數據回傳到控制中心,再下載最新指令,同時通過GPS等導航定位衛星進行定位和航路[2]。
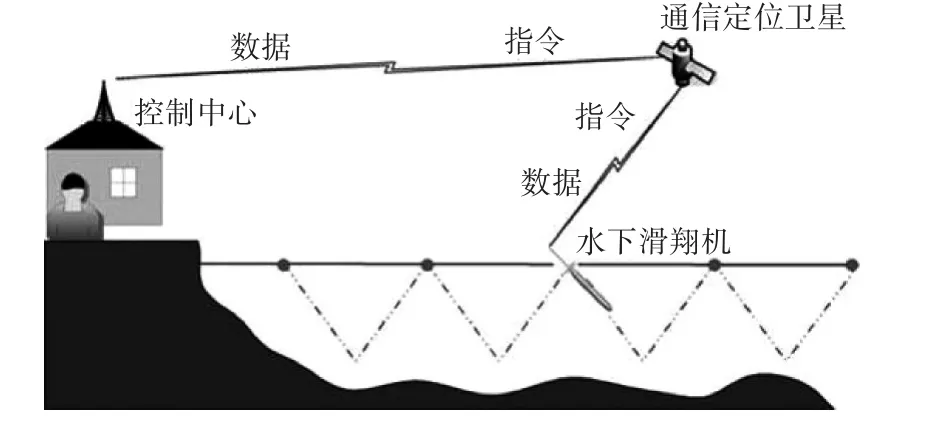
圖1 水下滑翔機工作示意圖
隨著十幾年的發展,水下滑翔機已經從最開始的一種相對簡單的水下航行器變得越來越精密復雜,功能也越來越強大,但考慮到作戰環境、裝載條件等因素限制,軍用水下滑翔機仍然與科研型或商用型水下滑翔機有較大區別。本文結合美國海軍UUV總體規劃中UUV擔負的任務(情報、監視與偵察、反水雷、反潛戰、觀察與識別、海洋學、通信與導航網絡節點、載荷輸送、情報戰、時敏目標打擊)[3],通過研究目前典型商業水下滑翔機設計的技術方案[4~7],分析軍用水下滑翔機的技術需求。
2 國外典型商用水下滑翔機
2.1 Spray Glider

圖2 Spray Glider
應用:海洋學,環境保護和監測,科學研究
布放/回收:人工
長度:213cm
直徑:20cm
翼展:110cm
航深:1500m
通信:GPS、銥星(平衡翼),ARGOS(尾鰭)
浮力系統:液壓泵
俯仰/橫滾:移動塊
能源系統:鋰電池
航程/持續力:4800km/6個月
航速:0.2m/s
傳感器:CTD,溶解氧測量計,熒光計、濁度計、高度計。
2.2 ANT Littoral

圖3ANT Littoral(深海型)
應用:情報,監視,巡邏,反潛,反水雷,海洋學
布放/回收:吊車
長度:2.0m
直徑:32.4cm
航深:10m~1000m
通信:銥星,802.11,GPS,GLOBALSTAR
浮力系統:液壓泵
能源系統:鋰電池
俯仰/橫滾:移動塊
航程/持續力:185km/30天
航速:1m/s
傳感器:聲學高度計,全向聲傳感器,定向聲傳感器,聲/速度/溫度/水壓傳感器,5kg載荷艙
2.3 Slocum Thermal Glider

圖4 Slocum Thermal Glider
應用:海洋調查,環境監測,科學研究
布放/回收:人工
長度:1.5m
直徑:21.3cm
翼展:120cm
航深:1200m
通信:射頻調制解調器,銥星,ARGOS
浮力系統:溫差泵
能源系統:海水溫差
俯仰/橫滾:移動塊
偏航:舵
航程/持續力:40000km/3~5年
航速:0.4m/s
傳感器:CTD
2.4 eFolaga

圖5 eFolaga
應用:海洋調查,海底地形制圖,檢查安保,環境監測
布放/回收:人工
長度:2.2m
直徑:15.5cm
空載凈重:31kg
航深:50m
通信:GPS,水聲調制解調器
浮力系統:液壓泵
推進系統:泵噴/螺旋槳
俯仰/橫滾/偏航:水噴/移動壓載
能源系統:鎳氫電池
航程/持續力:6個月
航速:1.01m/s(泵噴),2.02m/s(螺旋槳)
傳感器:電導率,溫度,光學傳感器,側掃聲納
3 典型軍用水下滑翔機的技術方案分析
水下滑翔機最顯著的特點一是超長的水下持續力和航程,二是航深可達上千米甚至數千米,適用于全球絕大部分海域,不足之處是航速過慢,普遍低于1m/s。其特點能滿足大范圍長時間的戰場水文數據采集、水下戰場監視偵查以及水下警戒預警等軍事需求。通過比較以上幾種典型水下滑翔機的技術性能和結構特點,可以在下面幾個方面對軍用水下滑翔機的技術方案進行分析。
3.1 殼體
水下滑翔機的殼體密封性的解決將能夠大大增加水下滑翔機的可靠性和任務的持續時間。殼體中前部的濕艙可裝載各種傳感器(例如CTD或前視、側掃聲納),后部的干艙可安裝浮力系統的充氣氣囊。此外殼體表面還需處理以減少海洋生物的附著繁殖。為了便于裝載和釋放回收,軍用水下滑翔機殼體應為雪茄型。
3.2 浮力裝置
水下滑翔機的浮力系統建議使用電動力雙泵系統,通過輔泵連接主泵將工作液體從耐壓殼的儲存器中泵到外部的氣囊中。這種結構可以在大深度環境下提高浮力系統的性能。如果使用海域限制在淺海,單泵就可以滿足需求,但是雙泵的設計可以增加水下滑翔機的使用海域,提高工作性能。
此外,對于目前比較熱門的溫差浮力系統而言,雖然已經在Slocum Thermal上使用,但是由于對環境的要求過于嚴苛,對水下滑翔機的潛在使用海域限制較大。據分析,全球只有65%的海域適合使用溫差型水下滑翔機[8]。在戰術使用觀點看,這大大限制了溫差型水下滑翔機在軍事方面的應用。
3.3 側翼和穩定翼
任何有側翼、尾翼或泵噴的水下航行器都可以從水面平臺和潛艇的干式遮蔽艙(DDS)釋放。若從潛艇的魚雷發射管自行航行出管,則只能采用類似eFolaga的泵噴型推進器。但eFolaga在最大航速下連續航行時間只有6小時[9],不能達到水下滑翔機持續工作的要求。綜合考慮,可利用魚雷發射裝置發射出管,殼體上的側翼和穩定翼采用折疊式,出管后自行展開。
為了能從水面平臺和潛艇的DDS釋放,可以采用類似Slocum的側翼配置,加上可控垂直穩定翼和雙泵浮力系統,這樣可在最大程度上延長持續工作時間。但穩定翼不建議結合通信天線,因為一旦受損會影響通信效果、任務執行和回收定位。而可更換的模塊化設計更便于航行器的運載和儲存,并可在回收后快速更換。
3.4 能源系統
除了溫差系統外,大多數水下滑翔機多使用電池作為能源系統,不僅為浮力裝置提供能源,還為裝載的各種電子設備提供必要的能源。考慮到軍用型對長航時和時敏性的要求,能源系統需要同時滿足長時小功率輸出和短時大功率輸出兩種狀態。為了減少能源消耗,還可利用勢差變化對電池充電。
3.5 控制
用于浮力裝置和傳感器供電的電池應該軸向布置,可以通過改變浮心和重心的間距,控制水下滑翔機的俯仰[11]。俯仰的絕大部分控制應由浮力裝置和側翼提供,同時改變重心和浮心的距離也能控制少許俯仰。這樣配置將俯仰控制塊在縱向的移動距離降到最小。橫滾控制通過水下滑翔機尾部上方的可控垂直穩定舵實現。相比于通過控制內部轉動滑塊實現轉向,這樣能大大減少了轉向時間,尤其在需要頻繁重復轉向的操航行中可以節省能量(例如水雷偵查)。
3.6 傳感器
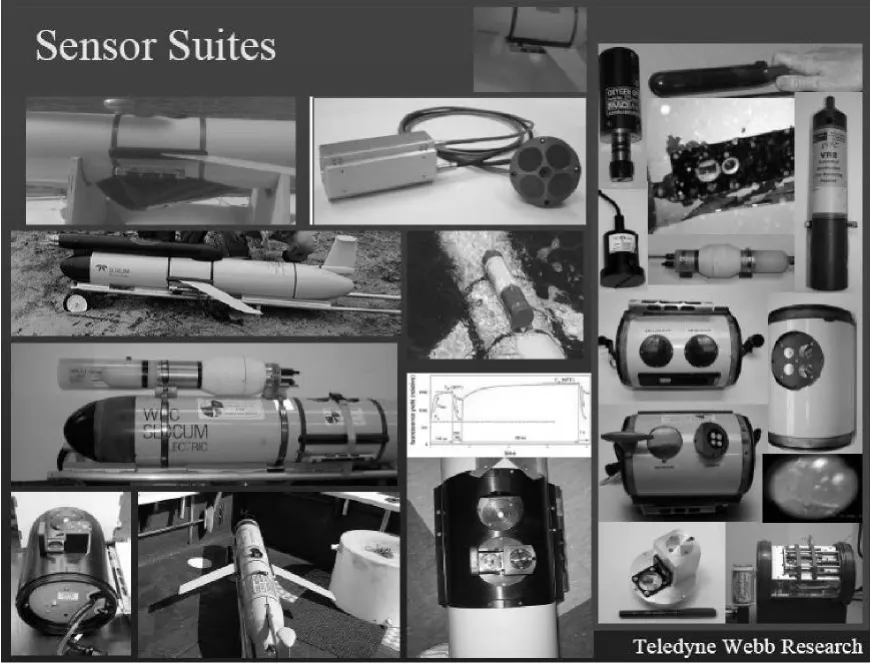
圖6 Slocum水下滑翔機的傳感器模塊
目前水下滑翔機通用的傳感器包括:CTD、高度計、羅經。此外,還有許多傳感器可以整合到水下滑翔機中。如水聽器、聲學多普勒流速剖面儀、磁傳感器、光散射衰減計等聲、光、磁傳感器,以實現對水下物理特性的測量和監視。
為了在不改變航行器總體重量和重浮力特性下使用多種傳感器配置,需要采用標準化的傳感器載荷模塊。模塊應有成熟的標準和接口控制文件,盡量減少對滑翔機其他部分的改動,避免對水下滑翔機進行重新配置。配置時需要全面考慮功能和功耗。
3.7 通訊/導航
美國海軍水下滑翔機通常使用的通信導航系統是包括銥星和GPS的組合模塊。根據任務海區不同,模塊還安裝一套加密設備以防通信數據被攔截。此外,美軍通常在垂直尾翼上嵌入GPS/銥星的天線。這樣可以避免增加額外的專用天線,更進一步優化流體動力。作為借鑒,我國的水下滑翔機可以使用衛星通訊和北斗導航的組合。
為提高行動的隱蔽性和集群協調配合,軍用水下滑翔機的水聲通信能力(如水下調制解調器)十分重要。多臺水下滑翔機既可以按照數據測量模式使用,又可以按照數據中繼模式使用,即把測量數據傳回通訊節點或潛艇[11]。而軍事行動為了避免發現,水下滑翔機是不能直接浮出水面來發送數據或進行定位校準的,定位校準應在夜間進行,且校準時間越短越好。但這樣可能會增加導航誤差,因此有必要在導航系統中使用航位推算技術。如果不能保證數據或導航定位的持續,在基本傳感器中還要包括慣性導航單元,以提高導航精度。
3.8 釋放和回收
目前水下滑翔機的釋放回收主要有四種:在水面平臺上用吊車吊放、通過導軌釋放、潛艇的導彈或魚雷發射管釋放和發射裝置發射[12]。
用吊車釋放過程中需要保護水下滑翔機的殼體、傳感器和側翼不被損壞。在吊車起吊和DDS中固定時也應盡量選擇在段與段之間的加固部位,類似圖3吊帶的布置。類似圖4從甲板上用導軌釋放時,水下滑翔機需要承受入水時的沖擊。從潛艇的導彈發射管或魚雷發射管釋放,水下滑翔機后部需要有類似圖2中Spray的固定釋放部件。若用魚雷發射裝置發射,航行器側翼和穩定翼需折疊,直徑要與發射管直徑相匹配。回收裝置和釋放裝置一樣。若在敏感海域執行任務則應考慮自毀功能。
4 結語
通過比較國外目前典型水下滑翔機的各項技術方案和性能特點,以水下持續力、航程和航深為主要軍事需求,研究了軍用水下滑翔機在殼體、浮力裝置、側翼和穩定舵、能源系統、控制、傳感器、釋放和回收等方面,得到既滿足需求由比較合理的技術方案,總結如表1。
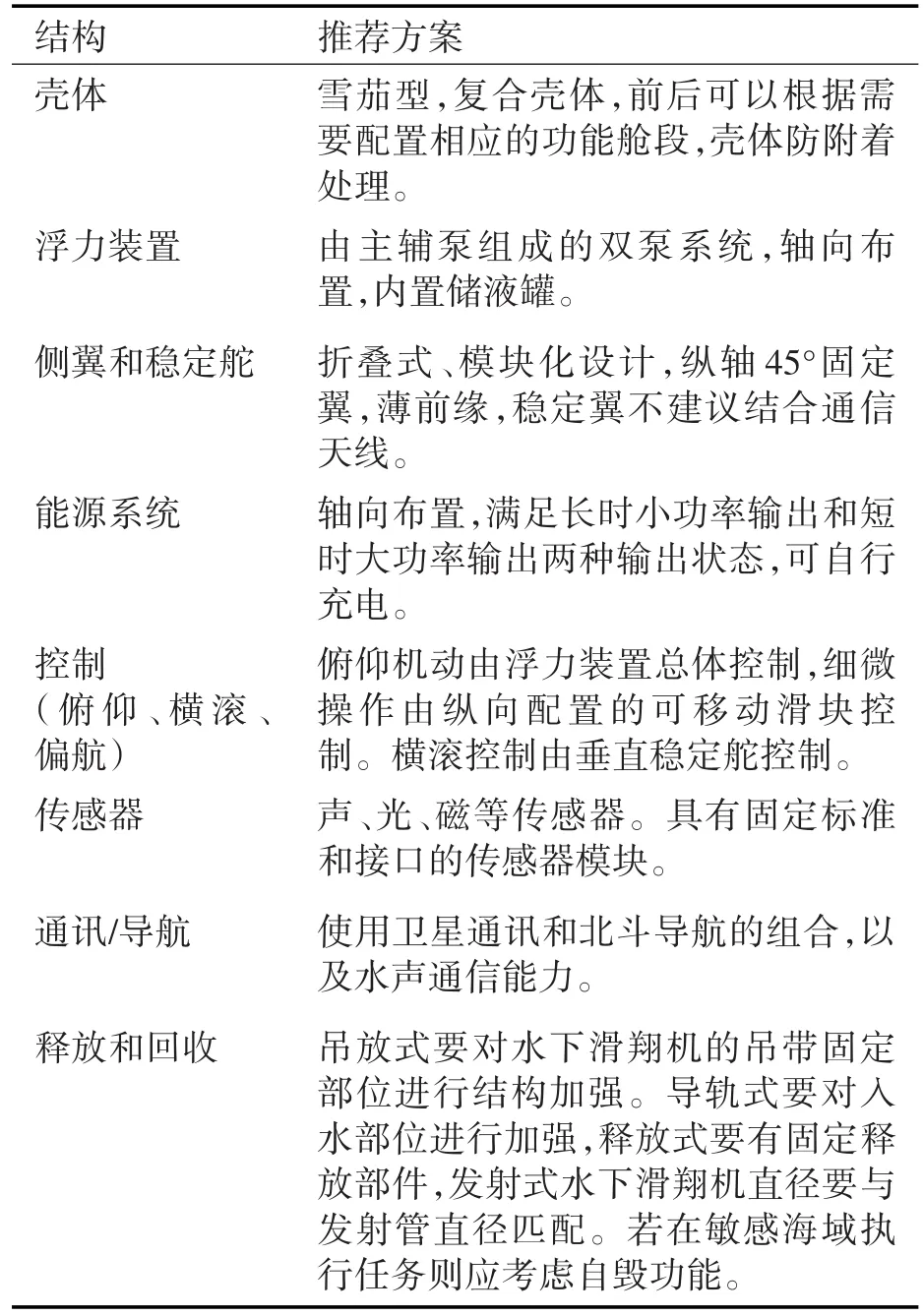
表1 軍用水下滑翔機推薦結構方案
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32