附加深度差和水平距離約束的深海控制點差分定位算法
2019-09-26 08:13:52孫文舟殷曉冬曾安敏暴景陽
測繪學(xué)報 2019年9期
關(guān)鍵詞:方法
孫文舟,殷曉冬,曾安敏,暴景陽
1. 海軍大連艦艇學(xué)院海洋測繪系,遼寧 大連 116018; 2. 地理信息工程國家重點實驗室,陜西 西安 710054; 3. 武漢大學(xué)測繪學(xué)院,湖北 武漢 430079
海底大地控制網(wǎng)是建立海洋大地測量基準的重要手段,對我國海洋強國的戰(zhàn)略具有重要保障作用,無論是海洋測繪工作還是海洋科學(xué)研究活動,都需要其作為基礎(chǔ)保障設(shè)施。目前確定海底控制點三維絕對坐標的技術(shù)手段主要采用GNSS結(jié)合聲學(xué)定位[1-7]。GNSS可以提供測量船高精度的三維坐標[8],聲學(xué)設(shè)備可以獲取測量船底換能器到海底應(yīng)答器的斜距值[9],經(jīng)過多次測量,利用距離交匯的方法即可解算出海底控制點的三維絕對坐標[10]。影響該方法定位精度最主要的因素是聲速的不確定性所引起的測距誤差[11-12]。
針對上述問題,國內(nèi)外的學(xué)者提出了不同的解決辦法。文獻[13]將3~4個應(yīng)答器在海底均勻地布設(shè)在一個圓上,將圓心作為虛擬的控制點,由于海水聲速垂直分層的性質(zhì),這樣做的好處可以提高虛擬控制點水平坐標解的精度,但垂直解的精度仍然較差。文獻[14]將差分的思想引入控制點坐標的解算,對連續(xù)兩個歷元的觀測方程進行差分,這種方法可以有效消除聲速長周期項的影響,但短周期項依舊存在。還有一類的做法是對聲速測距誤差進行參數(shù)化建模,將模型的未知參數(shù)與坐標改正值一并作為待估參數(shù)進行解算[15-16],因為海水聲速的變化主要發(fā)生在上層,海底處于恒溫層,聲速穩(wěn)定,因此應(yīng)答器的互測距值精度較高。文獻[17]將這一性質(zhì)引入到應(yīng)答器坐標的測定,不但提高了應(yīng)答器間相對位置的精度,同時還提高了作業(yè)的效率,但這種方法無法改進控制點絕對坐標的準確性。文獻[18]對此方法進行了改進,首先利用圓走航的方法獲得部分控制點的絕對坐標后,再開展應(yīng)答器間的互測距,最后利用網(wǎng)平差的方法解算所有控制點的三維坐標[18-19],實測試驗證明了這種方法可以將控制點坐標的解算精度提高一個數(shù)量級,但其自身依然存在一定的局限性,因為聲線彎曲,海底地形會阻隔聲波的傳遞,因此應(yīng)答器互測距的距離有限,通常僅幾百米[20-21],這很難滿足深海條件下的實際需要。此外,控制點的水深值通常是由壓力傳感器測量的壓力值轉(zhuǎn)化而來,轉(zhuǎn)化模型的誤差會隨著深度的增加指數(shù)型上漲[22-23],在深海條件下該值的準確性和可靠性將大大降低,因此目前傳統(tǒng)方法均無法獲得深海條件下控制點垂直方向準確的絕對坐標值。
通過上述的分析得知,目前確定深海海底控制點絕對坐標的問題在于垂直解的準確度低,而產(chǎn)生這一問題的主要原因是聲速的不確定性。為改善控制點垂直解的準確性,本文首先研究了聲速剖面在時間上的變化規(guī)律,并分析了聲速剖面的不確定性對水下聲學(xué)測距誤差的影響。然后研究測量船最佳的走航路徑,并提出了附加水平距離和深度差約束的控制點水下差分解算模型。最后,通過仿真試驗對該方法的有效性進行了驗證。
1 聲速剖面的不確定性對測距誤差的影響
聲速剖面可認為由兩部分組成,包括不隨時間變化的背景聲速剖面和隨時間變化的瞬時變化部分。由內(nèi)波、潮汐、溫度日變化引起聲速剖面的變化具有明顯周期性的特征。太陽輻射引起表層海水溫度的周期性變化,表層海水熱量通過熱傳導(dǎo)影響上層一定深度下溫度的變化,由溫度變化導(dǎo)致海水聲速剖面產(chǎn)生周期性變化。內(nèi)波會引起海水垂向運動,從而使上下層海水產(chǎn)生熱量交換,同樣使得某一厚度水層內(nèi)聲速剖面發(fā)生周期性變化,但相比于溫度日變化,周期較短。潮汐的作用會產(chǎn)生潮內(nèi)波或半潮日內(nèi)波,它屬于內(nèi)波的一種,因此對聲速剖面影響的機理與內(nèi)波相同,但周期與潮汐相同,屬于聲速剖面變化的長周期項。聲速剖面周期性的變化使得聲速剖面面積也呈相同的變化規(guī)律,其中溫度日變化和潮汐所引起的變化為長周期項,由內(nèi)波引起的為短周期項。
聲速剖面的不確定性是影響水下聲學(xué)測距精度最主要的因素,它所引起的測距誤差可分為兩部分,一部分是由背景聲速剖面測量的不準確引起,另一部分是由海洋內(nèi)波、潮汐、溫度日變化所引起的周期性誤差[24]。內(nèi)波引起的測距誤差為短周期項,而潮汐和溫度日變化引起的測距誤差為長周期項,這些規(guī)律由實際測量經(jīng)驗總結(jié)而來,未能解釋其內(nèi)在機理[1]。本文將基于ST定理對其進行分析,揭示其內(nèi)在規(guī)律。ST定理描述了聲速剖面面積與傳播時間的關(guān)系[25],可以將其表示為
T=k0·S
(1)
式中,T是瞬時聲速剖面下聲波從聲源到達海底應(yīng)答器經(jīng)歷的時間;S是瞬時聲速剖面面積;k0是常系數(shù),在背景聲速剖面一定的條件下,僅與初始入射角有關(guān)。
瞬時聲速剖面是難以獲得的,通常用于聲線跟蹤法的是實際測量獲得的某一固定聲速剖面,同樣基于ST定理可得
T′=k0·S′
(2)
式中,T′是實測聲速剖面下聲波從聲源到達應(yīng)答器經(jīng)歷的時間;S′是實測聲速剖面面積。由此可知T與T′的差即是由聲速剖面測量的不準確所引起的測時誤差。
將瞬時聲速剖面面積S看成由背景聲速剖面面積Sb和瞬時聲速剖面面積的變化量ΔS組成,將實測聲速剖面面積S′看成由背景聲速剖面面積Sb和兩者之差ΔSb組成,若近似的認為測距誤差是測時誤差與底層海水聲速的乘積,則將式(1)和式(2)做差得到測距誤差的近似表達式
δρ=cb·(T′-T)=cb·k0·ΔSb-cb·k0·ΔS
(3)
式中,cb是海底聲速值。從式(3)可以看出測距誤差可以認為由兩部組成,前一項cb·k0·ΔSb是背景聲速剖面誤差,由于ΔSb是常量,所以在k0不變的情況下,這一項測距誤差為常數(shù)。后一項cb·k0·ΔS是測距誤差的周期項,在k0一定的情況下,它的變化規(guī)律與ΔS相同。
根據(jù)以上分析可知,聲速的不確定性引起的誤差包括背景聲速剖面誤差、誤差長周期項和誤差短周期項。對于周期性的誤差,若能保證觀測數(shù)據(jù)的時間跨度相比于誤差周期項的周期足夠長,且觀測量足夠多,那么在計算控制點坐標的最或然值時,周期項誤差對坐標解算偏差的影響將被消除,這種手段適用于誤差短周期但不適用于誤差長周期項,因為誤差長周期項的周期為一天,很難保證連續(xù)幾天時間跨度的觀測,而短周期的周期為幾分鐘到幾小時,相比之下更容易滿足。為消除背景聲速剖面誤差和誤差長周期項的影響,本文進行如下設(shè)計,設(shè)計測量船的走航策略為兩應(yīng)答器的中垂線,這樣可以保證測量船到兩應(yīng)答器的距離時時相等,因距離相等,這兩項誤差數(shù)值相同,對同一時刻兩觀測方程做差可消除其影響。
2 深海海底控制點絕對坐標的解算方法
根據(jù)對聲速不確定性引起測距誤差的分析,海底控制點定位的觀測方程可以寫成
ρij=f(xi,xoj)+δρdi+δρvbi+δρvli+δρvsi+εi
(4)
式中,ρij是第i次測量船底換能器到海底應(yīng)答器j的距離觀測值;f()表示兩點之間直線距離;xi是測量船上船底換能器在第i次測量時的三維坐標;xoj是海底應(yīng)答器j在海底的三維坐標;δρd是應(yīng)答器固有測距誤差;δρvb是由背景聲速剖面測量不準確所引起的測距誤差;δρvl是潮汐,溫度日變化所引起的測距誤差長周期項;δρvs是由內(nèi)波引起的測距誤差短周期;εi是隨機誤差。
基于前文對測距誤差的分析,本文設(shè)計測量船的航跡為兩應(yīng)答器的中垂線,如圖1所示。其中黑色三角形是海底應(yīng)答器的位置,垂直于應(yīng)答器連線的虛線是測量船走航的航跡。這樣設(shè)計的好處在于每次采樣時,測量船到兩應(yīng)答器的距離近似相等,測距誤差δρd、δρvb、δρvl相等,利用差分的方法可將其消除,殘余的測距誤差短周期項和隨機項可認為是附加在δρd、δρvb、δρvl之上的擾動項,通過多次觀測予以消除,下面是基于此思想所建立的控制點定位解算模型。
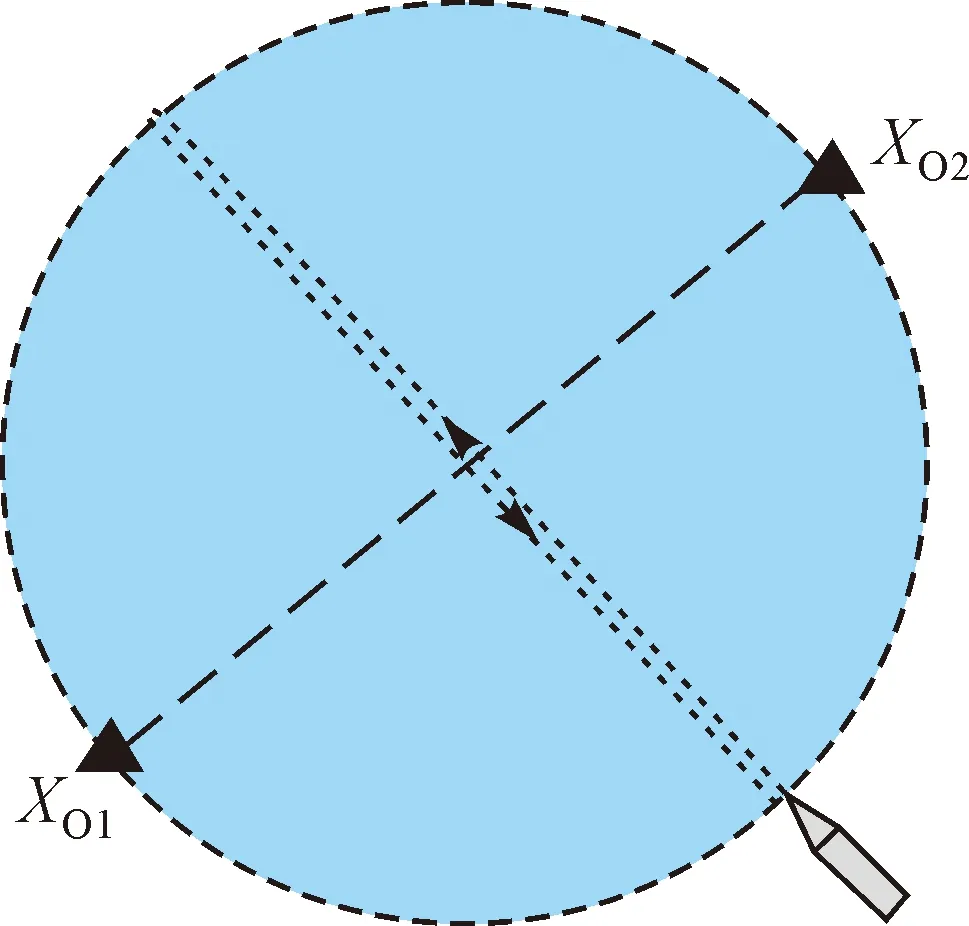
圖1 測量船走航航跡Fig.1 The trajectory of the survey ship
根據(jù)式(4)可得任一觀測時刻測量船分別到應(yīng)答器XO1和XO2的觀測方程
(5)
將式(5)中的兩式線性化展開后得
(6)

Δδρvsi+εij
(7)

V=Bdx-L
(8)
壓力傳感器在深海的測深值不準確,但是控制點之間的深度差卻可以精確的獲得,同時圓走航的方法已經(jīng)實現(xiàn)計算控制點的水平坐標可以達到厘米級的精度,因此本文在上述差分方法的基礎(chǔ)上又附加了控制點間水平距離和深度差約束,這兩項限制條件可表示為
(9)
Δz12=z1-z2
(10)
式中,h為應(yīng)答器的水平距離;Δz12是應(yīng)答器間的深度差,限制條件方程可寫為
(11)
dz1-dz2+Δz0-Δz12=0
(12)
式中,Δz0是Δz12的近似值;h0是h的近似值;l1=(x1-xo1)/h0;l2=(x2-xo2)/h0;m1=(y1-yo1)/h0;m2=(y2-yo2)/h0。將式(11)和式(12)寫成矩陣形式
C·dx+Wx=0
(13)
(14)

x=x0+dx
(15)
單位權(quán)中誤差的無偏估值為
(16)
控制點XO1和XO2的點位中誤差是
(17)
(18)
(19)
3 仿真試驗分析
為驗證新方法的有效性,本文進行了如下仿真試驗,仿真試驗的條件設(shè)計如下:坐標系選用笛卡爾坐標系,兩應(yīng)答器連線的中點在海面的投影位置是坐標原點,x軸指向東,y軸指向北,z軸指向天頂。水深設(shè)置為3000 m,應(yīng)答器布放于海底,坐標分別為XO1(-1500,-1500,-3000)和XO2(1500,1500,-2998),測量船航跡設(shè)計如圖1所示,速度6節(jié)(約3 m/s),每10 s實施一次水聲測距。除此之外,設(shè)置潮汐的周期為12 h,振幅為5 m,海面波浪的周期為20 s,振幅為2 m。測量船水平方向的定位精度為5 cm,垂直方向定位精度為10 cm,兩應(yīng)答器的參考深度偏差分別設(shè)置為1 m和1.2 m。
試驗中背景聲速剖面用Munk的標準方程構(gòu)建[26]
C=C1[1+ε(η+e-η-1)]
(20)
(21)
式中,C1=1482 m/s是聲道軸處的聲速;Z1=1000 m是聲道軸的深度;ε=7.4×10-3是擾動系數(shù);B=1300是聲道尺度厚度,仿真所得聲速剖面如圖2所示;若設(shè)置聲道尺度厚度B=1299,得到的聲速剖面當(dāng)作實測聲速剖面,圖2右圖為兩聲速剖面之差。
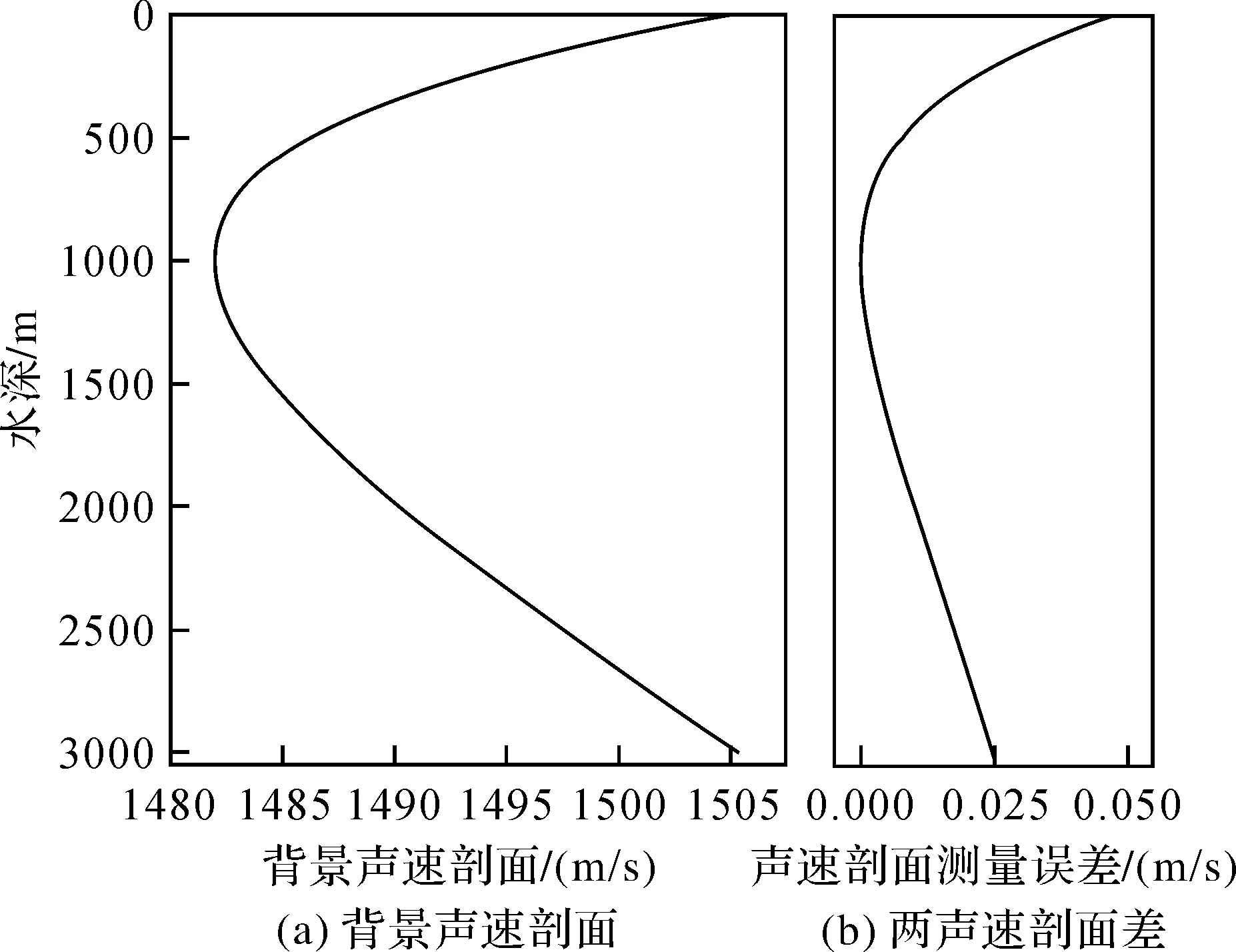
圖2 仿真所得聲速剖面Fig.2 Sound velocity profile abtained by simulation
實際海洋中聲速剖面不斷隨時間變化,本文根據(jù)文獻[27—28]的方法仿真了溫度日變化和內(nèi)波引起的聲速剖面變化的部分,分別代表聲速剖面的長周期和短周期變化,結(jié)果如圖3和圖4。
因為瞬時聲速剖面已知,換能器到應(yīng)答器的相對位置已知,所以觀測量傳播時間采用文獻[20]的方法計算,利用常梯度聲線跟蹤法,不斷調(diào)整初始入射角,當(dāng)聲線到達位置與應(yīng)答器的位置之間的距離小于某一限差時,對應(yīng)的傳播時間即為所求的觀測量,在此觀測量基礎(chǔ)上再附加RMS為5 μs的隨機測量誤差得到最終傳播時間觀測值。實際計算測距值是利用此觀測量、應(yīng)答器參考深度、包含誤差的某一實測聲速剖面(式(20),B=1299計算所得的聲速剖面),根據(jù)牛頓迭代法計算。
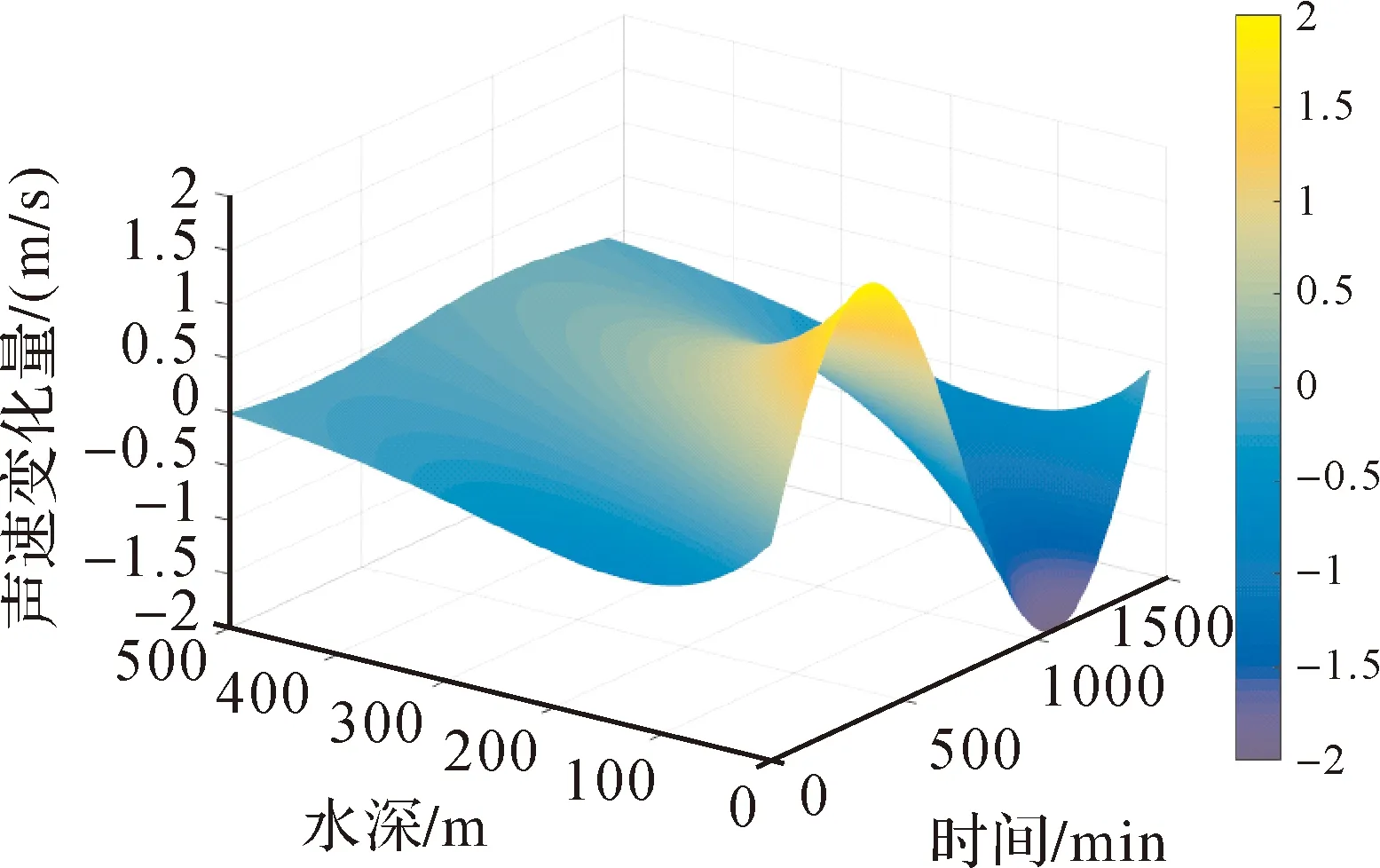
圖3 溫度日變化引起的聲速剖面變化Fig.3 Variation of sound velocity profile caused by diurnal temperature variation
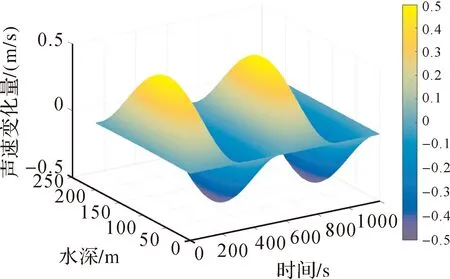
圖4 內(nèi)波引起的聲速剖面變化Fig.4 Variation of sound velocity profile caused by internal waves
根據(jù)Munk方程構(gòu)建的聲速剖面來驗證第2小節(jié)的結(jié)論,首先驗證背景聲速測量誤差引起的測距誤差與海底應(yīng)答器到船底換能器水平距離關(guān)系,試驗中不附加其他因素的影響,只考慮背景聲速測量誤差,結(jié)果如圖5所示。
從圖5中可以看出測距誤差及其增幅都隨應(yīng)答器到換能器水平距離的增大而增加。第2小節(jié)的分析得出結(jié)論測距誤差的變化規(guī)律與聲速剖面面積的變化規(guī)律相同,基于本節(jié)所設(shè)置的仿真試驗條件,設(shè)置船底換能器和海底應(yīng)答器的水平距離不變,對上述關(guān)于溫度日變化和內(nèi)波對測距誤差規(guī)律影響的結(jié)論加以證明,結(jié)果如圖6和圖7所示。

圖5 背景聲速剖面誤差引起的測距誤差與水平距離的關(guān)系Fig.5 Relationship between range error caused by background sound velocity profile error and horizontal distance
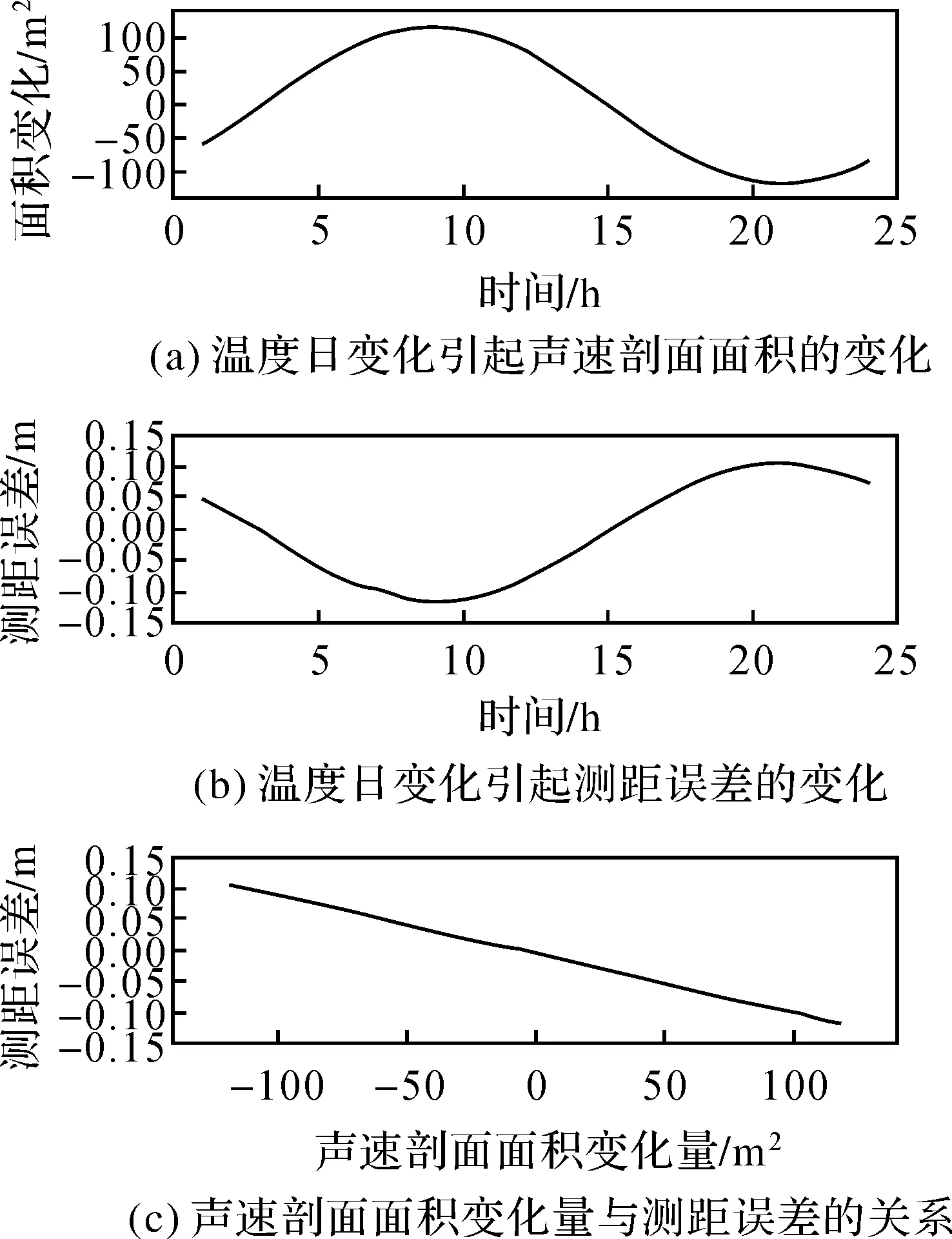
圖6 溫度日變化影響Fig.6 The influence of diurnal temperature rariation
從圖6和圖7可以看出,仿真試驗結(jié)果驗證了聲速剖面面積與傳播時間存在線性關(guān)系,同時也驗證了測距誤差的變化規(guī)律與聲速剖面面積的變化規(guī)律相同的結(jié)論,而且兩者具有相同的周期,在對測距誤差的變化規(guī)律分析完之后,開始對新方法有效性的驗證。
本文采用目前最常用的圓走航確定水下控制點坐標的方法作為對照試驗[29],測量船圓走航的半徑與水深相等,單個應(yīng)答器測量時間約2 h(測量船走航一圈),共獲得720個采樣點,兩應(yīng)答器的坐標偏差計算結(jié)果見表1。
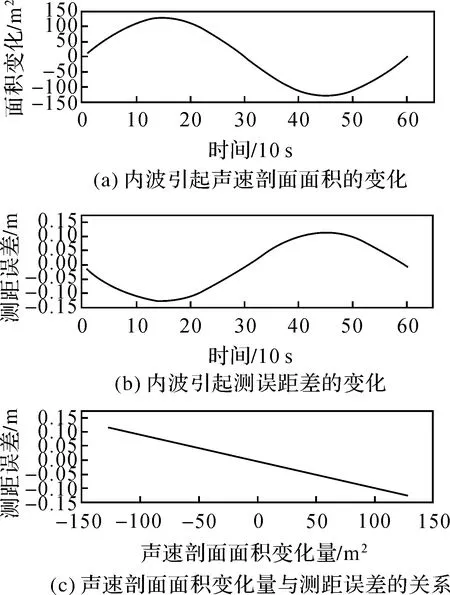
圖7 內(nèi)波影響Fig.7 The influence of internal waves
Tab.1 The coordinate deviation of transponderscm

應(yīng)答器dxdydzXO13.3-6.5-35.7XO23.7-6.4-36.4
從表1可以看出,應(yīng)答器坐標水平解的準確度高于垂直解一個數(shù)量級,表明圓走航的方法可以減小聲速誤差對水平坐標解的影響,但垂直解依舊較差,這與圓走航消除水平方向誤差的設(shè)計相吻合,也已被國內(nèi)外研究所證實。下面采用本文方法,測量船按所設(shè)計好的測線(圖1)走航4 h,共獲得1440個采樣點。兩應(yīng)答器三維坐標的解算結(jié)果見表2。
表2 兩應(yīng)答器的坐標解算偏差
Tab.2 The coordinate deviation of transponderscm
表2的結(jié)果表明,本文方法相比于圓走航無論水平解或是垂直解的偏差都得到了改善,相比之下,垂直解的改善更加明顯和有意義,垂直坐標的解算偏差由圓走航30幾個cm的偏差提高到了10 cm左右。圓走航能夠提高控制點水平方向坐標偏差的原因在于對觀測點空間分布的優(yōu)化,在確保應(yīng)答器到各觀測點距離相同的情況下,各主要因素引起的測距誤差近似相等,因此水平方向的誤差相互抵消,得到控制點坐標水平解的準確度較高。然而測量船始終處于海面,應(yīng)答器布放于海底,控制點坐標垂直方向準確度的提高是無法通過優(yōu)化觀測點空間分布的方法實現(xiàn)的,因此控制點坐標垂直解的偏差要遠大于水平解。與圓走航方法不同,本文方法在優(yōu)化了觀測點空間分布的基礎(chǔ)上,又利用差分的思想消除了主要測距誤差項,同時又附加了兩項約束作為限制條件,使得控制點垂直解偏差的準確性得到了較好的改善。
4 結(jié) 語
本文針對確定深海海底控制點三維絕對坐標垂直解偏差大的問題,分析了聲速剖面不確定性對測距誤差的影響,設(shè)計了適合深海海底控制點坐標確定的測量船走航策略,并提出了附加控制點間深度差和水平距離約束的差分定位算法,通過理論分析和試驗驗證得出了以下結(jié)論:
(1) 聲速剖面的不確定性引起的測距誤差包括背景聲速剖面誤差、誤差的長周期項和誤差的短周期項;聲速剖面面積與周期項測距誤差具有相同的變化規(guī)律和周期;
(2) 本文提出的附加應(yīng)答器水平距離和深度差約束的水下差分定位模型,相比于目前認可度較高的圓走航方法,控制點坐標水平解和垂直解的偏差都有所減小,特別是垂直解的偏差得到了較大的改善,驗證了該方法的有效性。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12