基于RobotStudio的工業(yè)機器人自動化生產(chǎn)線仿真的研究*
2019-09-26 01:47:56蔣慶磊聶永濤郇新
汽車實用技術(shù) 2019年18期
關(guān)鍵詞:效果
蔣慶磊,聶永濤,郇新
基于RobotStudio的工業(yè)機器人自動化生產(chǎn)線仿真的研究*
蔣慶磊,聶永濤,郇新
(濰坊工程職業(yè)學院山工機電工程學院,山東 青州 262500)
文章闡述了基于RobotStudio軟件運用Smart組件實現(xiàn)工業(yè)機器人自動化生產(chǎn)線仿真研究,主要用Smart組件創(chuàng)建動態(tài)輸送鏈、動態(tài)夾具,設(shè)定工作站邏輯等項目。關(guān)鍵技術(shù)是Smart組件的應用。在RobotStudio中創(chuàng)建碼垛工作站進行仿真,利用Smart組件實現(xiàn)動畫效果。案例應用調(diào)試結(jié)果說明,基于RobotStudio仿真工業(yè)機器人自動化生產(chǎn)線可以獲取高效、直觀的結(jié)果。
RobotStudio;工業(yè)機器人;自動化生產(chǎn)線;仿真
引言
RobotStudio是為ABB工業(yè)機器人配套開發(fā)的軟件,并應用于工業(yè)現(xiàn)場工業(yè)機器人軟件調(diào)試編程,所以,基于RobotStudio軟件能夠十分形象的模擬工業(yè)機器人自動化生產(chǎn)工作過程,設(shè)計的工業(yè)機器人程序代碼和運行文件,都可以移植到工業(yè)現(xiàn)場。根據(jù)可查詢到的文獻資料,都有RobotStudio軟件設(shè)計虛擬工業(yè)機器人自動化生產(chǎn)線的方案,而基于RobotStudio軟件具體進行工業(yè)機器人自動線仿真的技術(shù)要求不是很清晰。在工業(yè)現(xiàn)場生產(chǎn)線中,工業(yè)機器人的生產(chǎn)作業(yè)周期和任務要求等指標,是設(shè)計自動化生產(chǎn)線仿真環(huán)節(jié)必須考慮到的。
本文以ABB工業(yè)機器人的IRB460_110_240_01型號為例,介紹利用RobotStudio軟件的Smart組件操作和指令進行工業(yè)機器人自動化生產(chǎn)線仿真優(yōu)化。仿真結(jié)果說明,基于RobotStudio的工業(yè)機器人自動化生產(chǎn)線仿真,提高了編程設(shè)計效率,可以滿足自動線重組設(shè)計要求。
1 RobotStudio軟件簡述
RobotStudio軟件是重要的工業(yè)機器人離線編程軟件,與ABB品牌工業(yè)機器人配套使用。基于該軟件,能夠搭建工業(yè)機器人及其工業(yè)現(xiàn)場環(huán)境的模型,借助各種編程方式實現(xiàn)對機器人的工作路徑控制及操作,優(yōu)化現(xiàn)有的機器人程序,即在離線環(huán)境下完成軌跡設(shè)計。利用編程手段能夠十分形象的模擬生產(chǎn)線工作過程,實現(xiàn)三維多角度仿真,十分方便的檢查程序正誤,確認機器人能否達到目標位置,把生成的控制代碼上傳到工業(yè)機器人控制柜,進而控制工業(yè)機器人進給,實現(xiàn)目標任務。設(shè)計人員借助RobotStudio軟件,減少了工業(yè)現(xiàn)場操作人員設(shè)計編程工作量,提高了項目運作效率,計算工作周期,節(jié)約了生產(chǎn)成本,實現(xiàn)了安全生產(chǎn)。
RobotStudio軟件具有以下優(yōu)勢:導入CAD模型、生成自動路徑、程序編輯器、優(yōu)化路徑、自動分析伸展能力、防碰撞檢測、在線仿真作業(yè)。RobotStudio軟件的用戶界面包含功能選項卡、布局瀏覽器、路徑和目標點瀏覽器等,其中功能選項卡用的最頻繁,包含文件選項卡、基本選項卡、建模選項卡、仿真選項卡等。利用Smart組件強大功能,動態(tài)仿真工業(yè)機器人自動化生產(chǎn)線運行過程。
2 工業(yè)機器人自動化生產(chǎn)線仿真
在自動化生產(chǎn)線中,工業(yè)機器人已成為智能制造產(chǎn)業(yè)中十分重要的生產(chǎn)工藝,而工業(yè)機器人技術(shù)的核心之一是工業(yè)機器人自動化生產(chǎn)線重組,可以進一步提升工業(yè)機器人應用水平、生產(chǎn)能力。目前國內(nèi)為適應“中國制造2025”、新舊動能轉(zhuǎn)換重大工程發(fā)展需求,對智能制造人才的要求越來越高,那么工業(yè)機器人自動化生產(chǎn)線可以降低生產(chǎn)成本、提高工作效率、提升質(zhì)量水平,受到了社會廣泛關(guān)注。因此,對工業(yè)機器人自動化生產(chǎn)線仿真展開研究具有十分重要的意義。
工業(yè)產(chǎn)品自動化的市場競爭越來越激烈,用戶對生產(chǎn)效率的要求越來越高,追求低成本高品質(zhì)。當前在新產(chǎn)品生產(chǎn)之前,需要對生產(chǎn)線進行編程與調(diào)試花費時間太長不可取,所以采用工業(yè)機器人自動化生產(chǎn)線仿真,提高生產(chǎn)效率,僅需要對修改部分進行設(shè)計編程。RobotStudio軟件是基于ABB工業(yè)機器人VirtualController開發(fā)的,開發(fā)者能夠在電腦中很容易地模擬工業(yè)現(xiàn)場自動線工作過程,讓用戶充分了解設(shè)計和管理生產(chǎn)全過程的狀況。借助RobotStudio軟件能夠提升工業(yè)機器人生產(chǎn)線設(shè)計編程的正確性和效率,節(jié)約停機檢修時間,滿足工業(yè)機器人不同生產(chǎn)任務需求,具有一定的故障排查、安全生產(chǎn)教育、風險管理等作用。
3 利用Smart組件實現(xiàn)碼垛工作站仿真
3.1 用Smart組件創(chuàng)建動態(tài)輸送鏈
在RobotStudio中創(chuàng)建碼垛工作站仿真,輸送鏈的效果對整個工作站起到一個關(guān)鍵的作用。在工業(yè)機器人自動化生產(chǎn)線中,輸送鏈前端自動生成產(chǎn)品、產(chǎn)品隨著輸送鏈向前運動、產(chǎn)品到達輸送鏈末端后停止前進、產(chǎn)品被移走后輸送鏈前端再次生成產(chǎn)品,周而復始,循環(huán)運行。設(shè)定輸送鏈的產(chǎn)品源屬性設(shè)置效果如圖1所示。設(shè)定輸送鏈的運動屬性設(shè)置效果如圖2所示。設(shè)定輸送鏈限位傳感器屬性設(shè)置效果如圖3所示。創(chuàng)建屬性與連結(jié)仿真效果如圖4所示。創(chuàng)建信號與連接仿真效果如圖5所示。碼垛工作站的動態(tài)輸送鏈仿真運行如圖6所示。

圖1 Source設(shè)置

圖2 LinearMover設(shè)置

圖3 PlaneSensor設(shè)置

圖4 屬性與連結(jié)設(shè)定效果

圖5 信號和連接設(shè)定效果

圖6 動態(tài)輸送鏈仿真運行效果
3.2 用Smart組件創(chuàng)建動態(tài)夾具
在RobotStudio中創(chuàng)建碼垛工作站仿真,夾具的動態(tài)效果也是十分重要的。在輸送鏈末端拾取產(chǎn)品、在放置位置釋放產(chǎn)品、自動置位復位真空反饋信號,即實現(xiàn)夾具的動態(tài)效果。本案例中借助海綿式真空吸盤進行產(chǎn)品的拾取和釋放,利用Smart組件創(chuàng)建夾具。夾具屬性設(shè)定效果如圖7所示。檢測傳感器設(shè)定效果如圖8所示。拾取放置動作設(shè)定效果如圖9(a)、(b)所示。屬性與連結(jié)創(chuàng)建效果如圖10所示。信號與連接創(chuàng)建效果如圖11所示。夾具動態(tài)模擬運行效果如圖12(a)、(b)所示。

圖7 tGripper設(shè)定

圖8 LineSensor設(shè)置

圖9 (a)Attacher設(shè)置

圖9 (b)Detacher設(shè)置
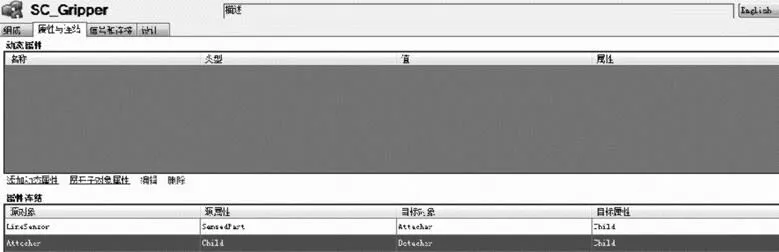
圖10 屬性與連結(jié)設(shè)定效果
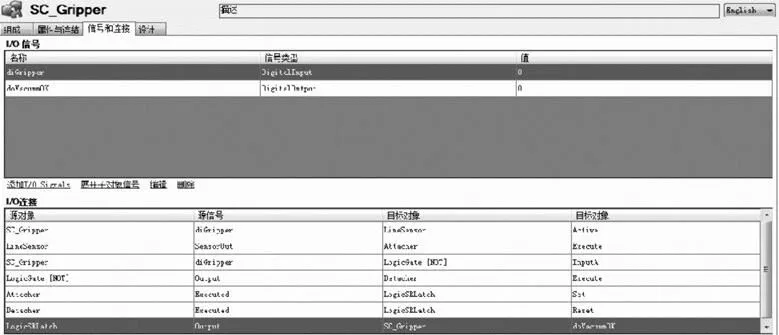
圖11 信號和連接設(shè)定效果

圖12 (a)夾具動態(tài)模擬產(chǎn)品拾取效果

圖12 (b)夾具動態(tài)模擬產(chǎn)品釋放效果
3.3 碼垛工作站仿真
按照上述步驟,設(shè)定好機器人程序以及I/O信號,再進行Smart組件與機器人端的信號通信,即設(shè)定碼垛工作站邏輯,將Smart組件的I/O信號與機器人端的I/0信號進行信號關(guān)聯(lián)。MainMoudle程序模塊內(nèi)容如圖13所示。Smart夾具的反饋信號與機器人端的反饋信號相關(guān)聯(lián),設(shè)定效果如圖14所示。輸送鏈前端產(chǎn)生復制產(chǎn)品,并沿著輸送鏈運動;復制品到達輸送鏈末端后,機器人接收到產(chǎn)品到位信號,則機器人將其拾起來并放置到托盤的指定位置;依次循環(huán),直到碼垛到10個產(chǎn)品后,機器人復位,即整體仿真效果,如圖15(a)、(b)所示。

圖13 MainMoudle程序模塊內(nèi)容

圖14 工作站邏輯設(shè)定
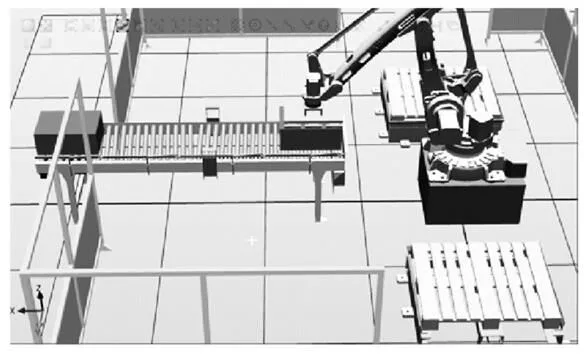
圖15 (a)整體運行仿真開始效果
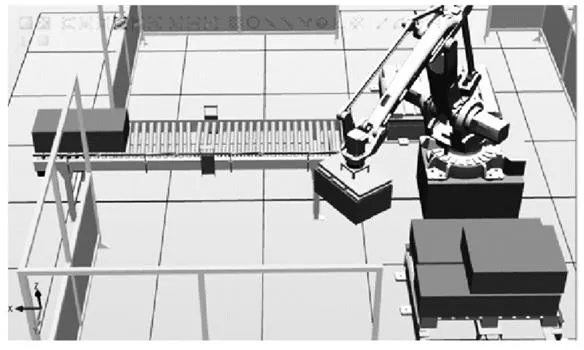
圖15 (b)整體運行仿真效果
4 結(jié)論
通過生產(chǎn)線仿真運行,了解到RobotStudio在工業(yè)機器人生產(chǎn)線仿真的應用,以及督促現(xiàn)實生產(chǎn)實際技術(shù)革新與改造。設(shè)計的仿真程序能夠下載到工業(yè)機器人上運行,與傳統(tǒng)的編程方法相比較,發(fā)展了生產(chǎn)力,提升了工業(yè)機器人生產(chǎn)線設(shè)計的準確性和穩(wěn)定性。
[1] 衡偉.基于RobotStudio的螺旋槳轉(zhuǎn)軸自動焊接設(shè)計[J].山東工業(yè)技術(shù),2019(4):6-11.
[2] 程福.應用RobotStudio軟件分析工業(yè)機器人的作業(yè)性能[J].機械工程與自動化,2019(2):26-27.
Research on the Simulation of Industrial Robot Automatic Production Line Based on RobotStudio*
Jiang Qinglei, Nie Yongtao, Huan Xin
( SEM School of Electromechanical Engineering, Weifang Engineering Vocational College, Shandong Qingzhou 262500 )
This paper describes research on the simulation of industrial robot automatic production line using Smart components based on RobotStudio software, mainly creating dynamic transport chain, dynamic fixture and setting the logic of workstation with Smart components. The key technology is the application of Smart components. Creating stacking workstation for simulation in RobotStudio, and using Smart component to achieve animation effect. The debugging results of the case application show that the simulation of industrial robot automatic production line can get efficient and intuitive results based on RobotStudio.
RobotStudio; Industrial robot; Automatic production line; The simulation
TP242.2
A
1671-7988(2019)18-177-04
TP242.2
A
1671-7988(2019)18-177-04
蔣慶磊(1986-),男,山工機電工程學院團總支書記、講師,就職于濰坊工程職業(yè)學院,從事機電一體化技術(shù)、工業(yè)機器人技術(shù)、精密檢測與質(zhì)量控制技術(shù)研究工作。
本論文是2018年度山東省高等學校科研計劃項目(一般項目)A類項目的階段性研究成果,項目編號:J18KA060。
10.16638/j.cnki.1671-7988.2019.18.059
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
好日子(2021年8期)2021-11-04 09:02:46
小學生學習指導(爆笑校園)(2020年6期)2020-07-03 10:01:10
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
中華詩詞(2018年11期)2018-03-26 06:41:34
小學生學習指導(低年級)(2017年11期)2017-10-23 01:32:36
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫(yī)藥科學(2015年19期)2015-02-27 12:33:11
