基于BP神經網絡的汽車尾氣檢測系統設計
2019-09-26 01:47:46周喚雄
汽車實用技術 2019年18期
周喚雄
基于BP神經網絡的汽車尾氣檢測系統設計
周喚雄
(甘肅交通職業技術學院,甘肅 蘭州 730070)
汽車使用量的快速增長,在很大程度上解決了人們的出行問題,但同時也向環境保護提出了更大的挑戰。為檢測車輛排放的尾氣中污染物的種類與數量,設計汽車尾氣檢測系統,介紹了系統中軟件與硬件組成,基于C#語言開發上位機軟件對采集數據進行處理與顯示,并在檢測系統中加入基于BP神經網絡的預測模型。通過實驗結果分析可知,該測量系統具有較強的檢測能力和較高的檢測精度,能夠對5種氣體進行準確測量,此外,將BP神經網絡模型應用在該尾氣檢測系統中,使得預測系統具有更高的預測精度,收斂速度大幅度增加,能夠較好地適應汽車尾氣預測系統,解決實際預測難題。
BP神經網絡;汽車尾氣;檢測系統;C#語言
1 引言
汽車尾氣中包含的有毒化合物對大氣污染的影響程度極高,檢測和控制汽車尾氣污染,已成為目前眾多學者關注的焦點[1]。在整治機動車尾氣污染的過程中,首先需要對污染物進行檢測與分析。除了在怠速和高怠速條件下對廢氣污染物測量方式的規定以外,國家標準還確定了不同型號汽車的廢氣污染物排放最值。汽車尾氣污染物檢測時涉及的檢測項目包括:CO、HC、CO2、O2、NO等[2]。
2 檢測系統設計
2.1 檢測系統硬件設計
本文設計的汽車尾氣檢測系統硬件組成方式如圖1所示。

圖1 汽車尾氣檢測系統硬件結構
檢測系統硬件采用工業控制計算機作為上位機,工業控制計算機與LED顯示屏相連進行參數顯示,通過尾氣分析儀初步檢測尾氣中各項氣體含量并傳輸到工業控制計算機中進行數據處理,通過紅外光電開關對I/O口進行開關控制[3]。尾氣分析儀依據不同氣體對紅外光譜吸收能力不同來測定出汽車尾氣的污染物種類與數量[4]。本文所設計的檢測系統能夠檢測汽車尾氣中CO、HC、CO2、O2和NO五種污染氣體的含量,測量得到的數據在LED顯示屏中顯示,通過RS-485串行總線與工業控制計算機相連進行數據交換。
實驗過程中配制不同濃度的氣體混合物進行實驗,將氣體與檢測系統泵體相連,從而使氣體通入傳感器陣列測試腔內,將各傳感器采集的信號進行初步處理后,得到實驗數據初值,為縮短測量系統網絡的收斂時間,提高模型預測精度,本文建立BP神經網絡預測模型進行測量分析,并與設定值對比對該系統模型的測量精度進行驗證[5]。
2.2 檢測系統軟件設計
本尾氣檢測系統采用C#語言編寫上位機軟件,能夠顯示不同怠速下汽車尾氣有毒氣體的濃度,汽車尾氣檢測系統的上位機軟件界面如圖2所示。
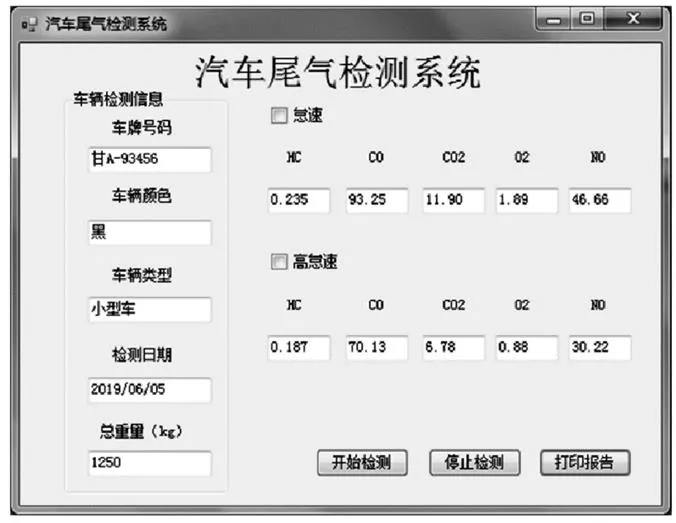
圖2 汽車尾氣檢測系統界面
3 神經網絡學習
3.1 神經網絡學習基本原理
神經網絡學習規則的訓練算法可分為兩大類別:有導師學習、無導師學習。本設計采用有導師學習的類型,即通過提供足夠數量的正確輸入、輸出樣本對預測模型進行訓練,達到教學的目的。該學習規則的一般步驟為:先進行前向傳播,系統輸入值先后進入神經網絡的輸入層、隱藏層、輸出層產生相應的輸出數據,再反向傳播,將通過神經網絡的輸出值與期望值即樣本的輸出值數據進行比對,根據學習規則調整預測的權重和臨界值,反復多次,當輸出結果和實際值之間的偏差在可接受范圍中時,停止運行。
BP神經網絡為一類采用有導師學習的訓練算法、偏差反饋與調節的神經網絡。其具體結構一般包括輸入層、隱藏層(可多個)和輸出層[6]。
3.2 神經網絡模型
針對汽車尾氣檢測系統選定神經網絡框架,首先選定輸入輸出層的數量。由于決策向量有兩個,分別是尾氣所含氣體種類、尾氣所含各種氣體的數量。將這兩個決策變量作為輸入,以滿足目標函數以及前2條約束條件的隨機仿真值作為輸出,由于各氣體檢測量為一個與氣體總量N相關的數組,所以輸入層的控制點數量是+1,輸出層的控制點數量是2。由于隱藏層控制點數量可能影響網絡性能,因此確定隱藏層控制點個數較為重要。若隱層節點數過多,會降低網絡運算效率。
步驟1:選取各層激勵函數。
本文模型的輸入層與隱藏層選擇雙曲正切函數tan作為激擾輸入,而將一次函數()=作為輸出層的激擾輸入。
步驟2:BP神經網絡的學習規則與運算步驟。
對于正向傳播:設樣本為:=[1,2,…,x],=[1,2,…,y](,分別為輸入層、輸出層控制點個數),當樣本輸入神經元時,輸入樣本與權重矩陣1(×1矩陣,1為隱藏層神經元的數量),所得結果代入激勵函數,得出隱藏層的輸出參數=[1,2,…,j]。隱藏層的輸出值再與隱藏層與輸出層之間的權重矩陣1(為×1的矩陣)相乘,所得結果代入二者之間的傳遞函數,所得結果為神經網絡輸出值=[1,2,…,z]。
對于反向傳播:通過網絡輸出值與期望值(輸出樣本)的比對,求出網絡輸出的誤差,一般的求法是與差值的平方和,然后對誤差進行分配,調整每一個權重和閾值。
設定學習次數與精度要求,多次重復上述的訓練過程,直到達到規定的次數或精度要求為止。至此,本文所需的神經網絡的功能用神經網絡估計來估計函數的任務已完成,不需進行下一步的回歸擬合。
4 實驗驗證與分析
在數據監測過程中,通過采用不同汽車類型進行測試,從而獲得足夠數量的實驗結果,采用神經網絡模型的預測誤差表如表1所示。
表1 神經網絡預測誤差表
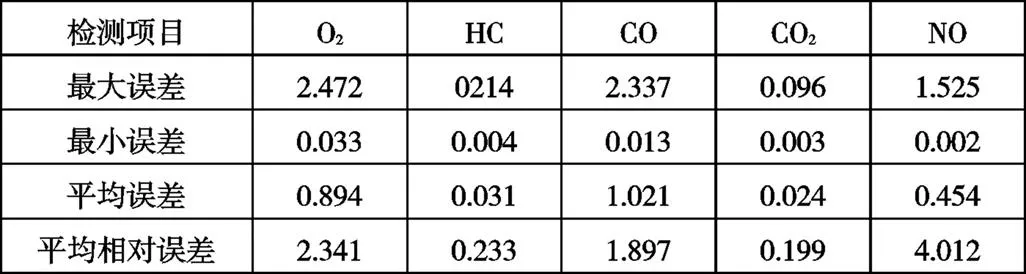
由表1數據可知,BP神經網絡預測模型對O2、CH、CO和CO2氣體濃度的預測數據誤差都不超過2.4%,NO的預測數值不超過4.1%,NO的高度不穩定性是使得準確性降低的主要因素。
5 結論
針對汽車尾氣檢測過程中所存在的技術難度大與測量精度低的問題,設計了一套基于BP神經網絡預測模型的氣體檢測系統,對軟件和硬件平臺的搭建方法進行介紹,并開展現場實驗。由實驗數據可知,該測量模型擁有平穩性能強與測量誤差小的優點,能夠對5種氣體進行準確識別與測量,此外,將BP神經網絡模型應用在該尾氣檢測系統中,使得預測系統具有更高預測精度,收斂速度大幅度增加,能夠較好地適應汽車尾氣預測系統,解決實際預測難題。
[1] 李鋼,谷威,劉進,等.在用汽車尾氣遙測法檢測及排放限值的研究[J].環境科學與技術,2016(S2):378-383.
[2] 張坤,陳鋒.非分光紅外車輛尾氣傳感器系統設計[J].傳感器與微系統,2016,35(2):130-132.
[3] 徐亞丹,工俊,趙國軍.檢測摻假牛奶的電子鼻傳感器陣列的優化[J].傳感技術學報,2006(4):957-962.
[4] 劉萍,簡家文,陳志蕓.基于集成神經網絡的汽車尾氣檢測系統設計[J].環境工程學報,2016(4):1883-1887.
[5] 張雪.城市軌道交通社會效益研究[D].哈爾濱:哈爾濱工業大學,2011.
[6] 馬超云.城市軌道交通換乘站列車時刻表的協調和優化[D].北京:北京交通大學,2010.
Design of automobile exhaust detection system based on BP neural network
Zhou Huanxiong
( Gansu Vocational and Technical College of Communications, Gansu Lanzhou 730070 )
The rapid growth of car use has largely solved the problem of people's travel, but it also poses a greater challenge to environmental protection. In order to detect the types and quantities of pollutants in vehicle exhaust, the automobile exhaust detection system is designed, and the software and hardware components of the system are introduced. The upper computer software based on C# language is developed to process and display the collected data, and a prediction model based on BP neural network is added to the detection system. By analysing the experimental result shows that the measuring system has strong ability of detection and high detection accuracy, can carry on the accurate measurement of five kinds of gas, in addition, the BP neural network model used in the tail gas detection system, made the forecast system has higher prediction accuracy, convergence speed increase, can better adapt to the automobile exhaust prediction system, to solve practical prediction problem.
BP neural network; automobile exhaust; detection system; C# language
TP183
A
1671-7988(2019)18-107-03
TP183
A
1671-7988(2019)18-107-03
周喚雄,學士、實驗師,就職于甘肅交通職業技術學院、研究方向為汽車檢測技術。
10.16638/j.cnki.1671-7988.2019.18.035
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
