無人直升機著陸過程邊界保護控制技術研究
2019-09-25 13:22:14王剛強
數字技術與應用 2019年6期
王剛強
摘要:無人直升機著陸過程的關鍵是下降速度的平穩控制和位置的精確控制,以避免較大的速度觸地或偏離著陸點過遠引發的安全風險。針對該問題提出了一種無人直升機著陸過程邊界安全保護策略,利用高度通道控制律切換和總距自動配平解決下降速度異常,通過高精度位置控制律以及垂向和位置回路的協同解決位置偏差。通過半物理實時仿真驗證了該控制方法的有效性。
關鍵詞:無人直升機;著陸;位置控制;下降速度
中圖分類號:V249.1 文獻標識碼:A 文章編號:1007-9416(2019)06-0004-03
0 引言
無人直升機具備可垂直起降的飛行能力,隨著逐步推向應用,其可垂直起降的特點是其應用的顯著優勢。同時在進行垂直著陸時,此時相對于前飛狀態,直升機穩定性變弱。由于著陸過程為近地階段,風場環境變化復雜,著陸場地的限制,可能出現接近或超出安全邊界的情況。本文針對無人直升機著陸的邊界保護控制進行研究,提出邊界保護控制策略,并進行了控制律設計和仿真驗證。
1 控制策略設計
1.1 著陸過程描述
無人直升機完成飛行任務后,進入回收點上空懸停等待著陸,根據操縱權限可以分為人工著陸和自動著陸兩種方式。人工著陸為地面站操縱人員發出操縱指令,在著陸過程中,縱橫通道和航向通道處于混合控制方式,即當操縱人員不進行操縱時,控制通道處于控制保持狀態,總距通道處于人工全權限控制。自動著陸為飛控系統自動執行著陸流程,為應對突發情況人工操縱量隨時可以進行干預。著陸過程可分為三個階段:懸停位置調整、穩定下降、觸地階段[1]。
(1)懸停位置調整階段。飛機前飛進場,縱向控制通道采用速度控制,橫向控制通道采用航跡側偏控制。完成減速后,懸停位置需要再進行調整,以保證懸停在回收點正上空,并保持定點懸停,為著陸作準備。(2)穩定下降階段。此階段直升機總距控制通道實時跟蹤下降速度指令,位置控制通道和航向都是保持控制。下降速度指令分段處理,當地效區外時,以較快速度下降,進入地效區后,氣動特性發生較大變化,為保證穩定,需要考慮起落架抗沖擊能力,采用較小的安全速度下降。同時由于飛機已經距離地面較近,由于受到回收點附近地面狀態、建筑物、樹木等障礙物的限制,對縱橫向的位置控制精度提出著很高要求。(3)觸地階段。當直升機接近觸地時,直升機處于高總距狀態,在臨界狀態如果受到氣流擾動容易出現地面滑動的危險狀態,應該快速減小總距。在地面狀態下,縱橫向位置如果存在偏差,在積分作用下,會出現槳盤傾斜以修正位置偏差,所以此時應斷開縱橫向控制。發動機由額定狀態過渡至慢車、暖車、怠速和停車,完成整個著陸過程。由人工著陸和自動著陸的處理過程,可以看出下降階段著重需要對下降速度和位置的邊界保護控制進行重點研究。
1.2 位置保護策略設計
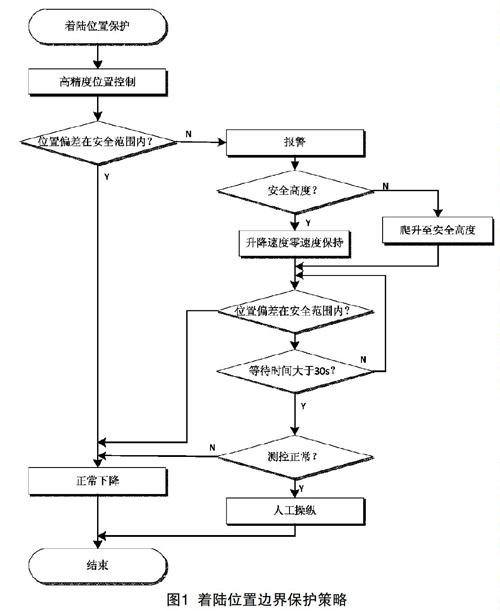
這里采用一種基于非線性反饋的高精度位置控制律,提升位置控制的抗擾性能。另外考慮到無人直升機受到超出能力的強陣風干擾時,容易出現較大位置偏差,超出安全范圍,此時如果繼續著陸,就會發生安全事故。因此需要設計位置偏差安全保護策略,改變垂向控制和位置控制相互獨立,無法協同解決著陸風險的問題。位置安全保護策略如圖1所示。
通過高精度位置控制實現著陸范圍在安全范圍內,高精度位置控制的橫側向速度指令由位置偏差產生;當著陸位置超出邊界后,說明高精度位置控制已經無法平衡干擾,應立刻報警,然后減小下降速度,進入升降速度零速度保持狀態。判斷當前高度是否能夠保證飛機安全,如果高度不足則轉為爬升狀態,直到安全高度。直升機高度通道進入定高狀態后,等待位置回路逐漸消除位置偏差,待飛機重新回到位置安全范圍后重新啟動下降過程,如果等待了30s依然無法消除過大的位置偏差,則終止自動著陸,采用人工操縱方式應急處置,如果此時測控鏈路異常,為防止始終無法著陸的風險,繼續下降完成自動著陸。
1.3 下降速度保護策略設計
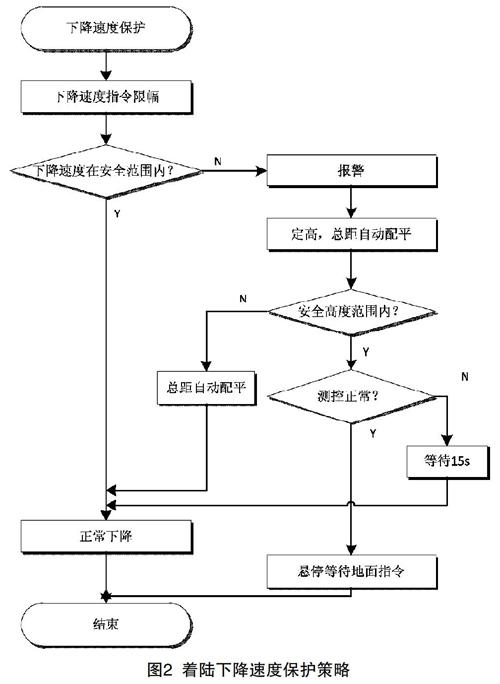
無人直升機在著陸控制中,如果下降速度過大,會使旋翼進入渦環狀態,然后旋翼產生的力混亂、減小,直升機很容易失去高度。所以,必須嚴格控制下降速度,避免進入渦環。另外由于飛機結構抗沖擊能力限制,也必須對觸地瞬間的下降速度進行約束,因此需要綜合兩者。當直升機下降速度大于下降速度保護時,需要進入下降速度應急保護,垂向控制通道立刻接入定高,并啟動總距自動配平,進入定高等待。判定高度是否安全,若高度足夠,則進入懸停等待狀態,然后判定測控鏈路狀態,如果測控正常則等待地面站人員指令,若測控鏈路失效,則懸停等待15秒后重新開始下降過程。若低于安全高度,則在總距配平的同時繼續完成著陸過程。著陸下降速度保護策略如圖2所示。
2 控制律設計
2.1 位置控制律設計
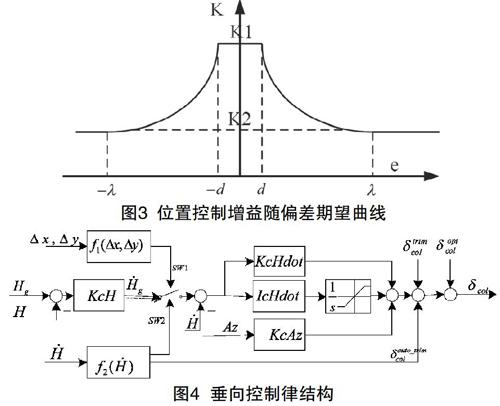
位置控制按照操縱通道分為縱向位置控制和側向位置控制,姿態控制作為位置控制內回路,和位置控制回路并聯實現無人直升機懸停小速度段位置保持和跟蹤。這里為了提高位置控制的控制功效,以保證位置控制精度,采用非線性PID的方法,該方法核心思想為變增益控制策略[2]。當位置偏差很大時,采用常規位置控制律,主要通過人工遙調逐漸減小位置偏差,可以起到保障飛行安全的作用。當位置偏差到達一定范圍內后,采用非線性反饋實現變增益控制,隨著偏差變小增益增大。當位置偏差很小時,如果控制增益很大,容易引發過零震蕩的穩定性問題,需要對控制增益進行限幅。位置控制增益期望變化曲線如圖3所示。
縱向和側向位置控制律結構相同,這里以縱向位置控制為例,如式(1)所示,式中為縱向周期變距配平,為俯仰角配平。
2.2 垂向控制律設計
垂向控制律的控制的目標為高度和垂向速度。控制律結構如圖4所示,采用高度和升降速度控制環節串聯結構,由高度偏差生成升降速度指令,升降速度控制采用比例-積分-微分型(PID)控制結構,垂向加速度改善垂向速度響應過程的阻尼特性,積分向改善高度和升降速度的控制精度。另外,增加垂向速度邊界閾值判定,以及由位置控制律引入縱向和側向位置偏差進行位置邊界閾值判定,對高度控制回路的通斷進行附加控制,實現邊界保護控制策略。控制律結構圖4和式(2)所示。式中,為總距配平,為垂向總距自動配平,為人工操縱總距量。
3 仿真驗證
基于半物理實時仿真環境設計了兩項仿真科目,分別驗證位置邊界保護控制和下降速度邊界保護控制[3]。仿真科目一:地面海拔高度為20m,樣例無人直升機由離地30m高度懸停保持狀態進入自主著陸流程,在下降過程中模擬風擾動,加入幅值10m/s的側向水平陣風,模擬側向位置超過邊界。對比分析三種控制方式:(a)無位置邊界保護+常規位置控制律;(b)位置邊界保護+常規位置控制律;(c)位置邊界保護+高精度位置控制律。仿真科目二:在下降過程中模擬下降速度異常波動,注入總距波動-4°,驗證下降速率保護功能。
由圖5可以看出,在陣風擾動加入后,控制方式a位置偏差迅速增大,在觸地時,側向位置偏差3.5m;控制方式b當位置偏差到達閾值時,進入了高度保持狀態,位置控制有更多時間消除位置偏差,在觸地時位置偏差1.3m;控制方式c采用非線性PID位置控制相對于常規位置控制,位置控制精度得到了明顯提升,在10m/s風擾動環境下,可以保證位置偏差在安全范圍內,在觸地時位置偏差為0.9m。由圖6可以看出當注入總距波動時,下降速率突然增大,觸發下降速率保護機制,下降速度迅速得到抑制,當不進行邊界保護時,觸地速度為-6m/s,接入下降速度保護后觸地速度為-0.5m/s,無人直升機可以安全著陸。
4 結語
本文針對無人直升機著陸提出了一種針對位置偏差和下降速度的邊界保護策略,設計了位置控制律和垂向控制律,通過半物理實時仿真系統模擬實際著陸過程,驗證了該控制方法能夠很好解決著陸過程的安全邊界保護問題。
參考文獻
[1] 韓京清.自抗擾控制技術:估計補償不確定因素的控制技術[M].北京:國防工業出版社,2008.
[2] 尹亮亮,黃一敏.無人直升機高精度位置控制[J].飛行力學,2012,30(4):324-327.
[3] Tanner O, Geering H P. Position an autonomous helicopter with high accuracy using robust controllers[C].AIAA Guidance, Navigation, and Control Conference and Exhibit. Montreal:AIAA,2001:1-17.
Research on Boundary Protection Control Technology for Unmanned Helicopter Landing Process
WANG Gang-qiang
(China Helicopter Research and Development Institute, Jingdezhen Jiangxi? 333001)
Abstract:To avoid safety risk caused by high speed landing or deviation from landing point, the key is the stability of descent speed control and the precision of position control for the landing process of unmanned helicopter. In order to solve this problem, a boundary control strategy for unmanned helicopter landing process is proposed, which used vertical control law switching and collective automatic trim to solve the abnormal descent speed, solving excessive position deviation is by means of high precision position control law and cooperation between vertical and position loop. The effectiveness of the control method is verified by hard-in-loop real-time simulation.
Key words:UAH; landing; position control; descent speed
