平衡球滾動示教平臺在高職創新實訓課程中的實現
2019-09-23 01:44:56劉林李靜王欣
現代職業教育·職業培訓 2019年7期
劉林 李靜 王欣

[摘? ? ? ? ? ?要]? 為提高學生對機電專業的學習興趣,加深對自動控制相關概念的理解與應用掌握。設計平衡球滾動測試平臺作為示教實例,為了方便教學,基于S7-1200 Siemens PLC 作為控制核心。此類示教實例旨在利用擺桿的角度傾斜,控制小球滾動的運動軌跡,涉及小球位置、速度及加速度等多種物理量的精確操控,同時也可結合小球運動過程中數學物理模型的建立,將自動控制中的定時、中斷、循環掃描等方法巧妙地引入其中,達到較好的示教與實訓效果。測試結果證明,該平衡球滾動示教平臺可行性高,教學效果良好且節省了教學資源和成本。
[關? ? 鍵? ?詞]? 平衡球滾動;示教平臺;定時中斷
[中圖分類號]? G712? ? ? ? ? ? ? ? ? ?[文獻標志碼]? A? ? ? ? ? ? ? ? ? ? ? [文章編號]? 2096-0603(2019)21-0114-02
高等職業專科學生實踐與創造能力的培養是以高職高專學生為主要對象,根本目的是最大限度地激發學生的積極性、主動性、創造性,潛移默化地提高學生動手能力,并讓學生掌握獨立面對與處理問題的辦法,從而提升學生在生活中的實踐創造力。
本文針對我系電子電氣專業“高職創新實訓”課程,設計并實現了一個平衡球滾動實訓平臺作為示教項目。通過該示教項目,教師可以將一個系統的高職高專創新實訓項目的原理、操作等呈現給學生。此外,S7-1200為最新一代Siemens PLC,借此平臺可提供較好的學習機會,豐富實訓內容,培養學生對新型PLC的感性認知程度,增加教學過程的靈活性。
一、示教平臺機械結構部分
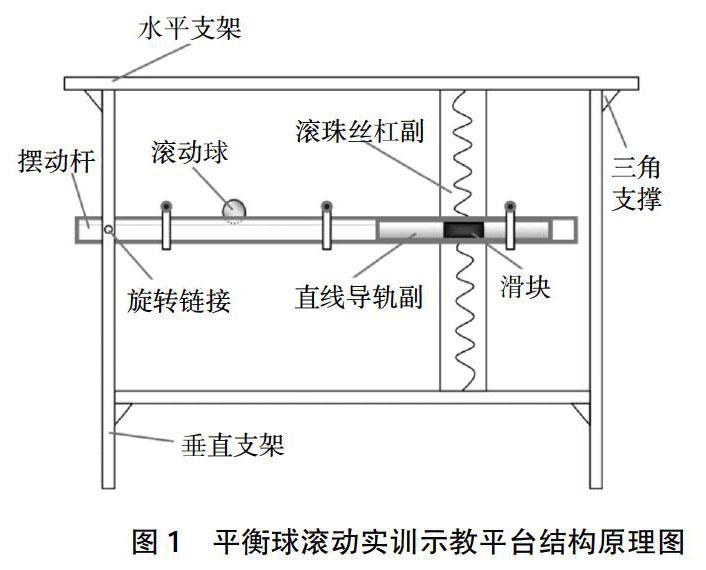
本文所采用的平衡球滾動控制示教系統裝置,包括作為基礎平臺的平臺架以及左端經橫轉軸轉動鉸鏈在平臺架中的擺動桿和設置在該擺動桿上能沿擺動桿導向來回滾動的平衡球,擺動桿的右端為自由端,該擺動桿的右端設有直線導軌副;直線導軌副包括固定在擺動桿右端一側面上的直線導軌和與該直線導軌滑動配合的導軌滑塊;平臺架中縱向安裝有滾珠絲杠副,滾珠絲杠副包括受步進電機驅動的絲杠和與絲杠螺旋配合能沿絲杠上下移動的絲杠滑塊,絲杠滑塊與導軌滑塊相連接,如圖1所示。
擺動桿上間隔設有多個與S7-1200 PLC輸入信號相連的平衡球位置傳感器,平臺架中安裝有用于限定絲杠滑塊移動最大上限的上限位置傳感器和用于限定絲杠滑塊移動最大下限的下限位置傳感器,單片機依據平衡球位置傳感器反饋的平衡球滾動位置信號以及上限位置傳感器反饋的絲杠滑塊的上限信號和下限位置傳感器反饋的絲杠滑塊的下限信號,經內部綜合運算處理后電信號控制步進電機的旋轉方向,該步進電機旋轉驅動滾珠絲杠副利用直線導軌副帶動擺動桿以橫轉軸為旋轉軸心上下旋轉調節擺動桿的傾斜角度,以控制平衡球的預定運動軌跡,實現平衡球在擺動桿上靜止或做周期性往復滾動的精控示教。
二、示教平臺硬件部分
S7-1200作為Siemens最新一代PLC的可編程控制核心,其卓越的性能致使設計與開發效率達到最優的效果。基于S7-1200的控制系統在最大限度上優化了整體的設計,且將項目開發成本控制到最好的結果。因此,本示教項目的滾動球示教平臺采用以S7-1200 PLC為核心控制芯片。
平衡球滾動示教平臺控制系統包括5個模塊。(圖2)
其中,電源模塊,用于為示教平臺供電; S7-1200 PLC,用于處理I/O交互信息,控制每個模塊高效運行;霍爾接近開關模塊,用來檢測小球滾動運行過程中其所處的位置以及通過監測相鄰兩點之間的運動時間來推算當前運動速度;限位模塊,用于控制擺桿的運動位置不過限位;步進電機驅動模塊,用于驅動步進電機帶動擺桿移動至相應的角度以控制小球以預定的速度運動到目的地位置。
三、示教平臺軟件及界面
(一)軟件部分
本論文的平衡球滾動控制示教系統平臺,可實現的示教功能及軟件算法如下:
1.可實現擺動桿的水平定位,其主要實現方法是:首先通過PLC控制步進電機帶動絲杠旋轉,使擺動桿右端低速向下運動,當運動至下限位時即限定絲杠滑塊移動的最大下限位,減速停止。而后步進電機反向快速運動,使擺動桿到達水平位置(位移量能經準確測量后給定);此時,將一小球即平衡球放在擺動桿上的任意位置,小球靜止不動。
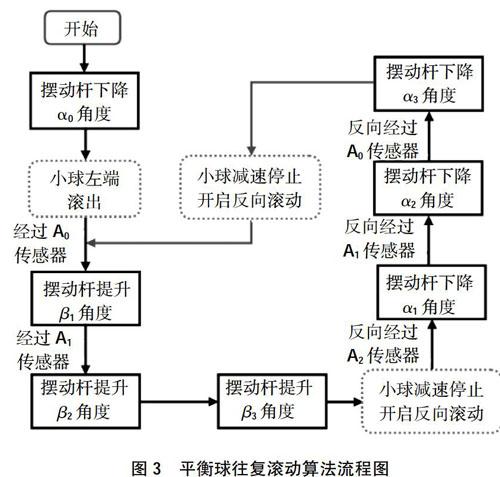
2.將小球放置擺動桿的最左端即左限位擋板限定的左端位置,通過控制擺桿傾斜一定的角度,使其滾動起來,經過平衡球位置傳感器時,通過軟件實時掃描可觸發相應開關,并通過調整擺動桿的角度來控制小球的預定運動軌跡。最終可使小球在擺動桿上做周期性往復滾動,控制則由PLC控制實現。具體算法框圖如圖3所示:
3.通過測量擺動桿上任意連續兩點間的小球滾動時間,可測量當前擺動桿的傾斜角度,此項可采用單片機中的定時中斷結合外部中斷的方式來實現,外部中斷主要用于將平衡球位置傳感器的信號輸入控制系統內部,用于觸發定時中斷開啟累計毫秒個數,直至小球滾動到下一檢測點時即下一個平衡球位置傳感器時,停止計數,所統計的時間可用于改變擺動桿的傾角,以控制小球的預定走位。其具體算法如圖4所示。
(二)界面部分
本文根據高職學生實訓教學平臺的特點,在S7-1200上位觸摸屏設計了平衡球示教監控系統平臺。控制界面設定包含平衡球的運行速度,霍爾接近開關傳感器用于檢測小球滾動位置。Auto控制與Manual控制界面實現了觸摸屏與平衡球系統之間的全雙工通信。
四、結論
本文通過研制平衡球滾動實訓示教平臺,以實現一種利用示教結合實訓的方法來進行“高職高專創新實訓”課程的理實一體化教學方法。本示教實例是以平衡球滾動的示教機構為主體,讓學生能夠扎實學習并掌握以下關鍵知識點:
(1)PLC可編程控制器以及其數字模擬量系統的硬件設計方法;(2)PLC可編程控制器的定時、中斷軟件高階編程方法;(3)PLC控制器與其他傳感器或硬件的連接;(4)學習并掌握下位機(lower)與上位機(upper)之間通信方式;(5)觸摸屏編程語言學習及組態軟件設計方法。
參考文獻:
[1]馬樹軍,金鐵錚.面向校內生產實習的電火花成型加工技術在線示教系統探索和研究[J].中國現代教育裝備,2019(1):15-17.
[2]郝雯娟,任嚴偉.大學生創新課程實例:智能小車平臺實現[J].電子電氣教學學報,2018(1):129-133.
[3]張曉琪,王旭,尹天浩,等.科技創新智能實訓平臺研制[J].試驗技術與管理,2019(3):128-131.
猜你喜歡
作文大王·笑話大王(2021年4期)2021-04-26 19:00:35
裝備制造技術(2020年12期)2020-05-22 09:25:38
福建教育學院學報(2019年4期)2019-06-12 08:39:10
電影(2018年9期)2018-11-14 06:57:21
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
計算機測量與控制(2017年6期)2017-07-01 16:23:53
電子制作(2017年8期)2017-06-05 09:36:15
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40
新時代職業教育(2016年4期)2016-02-06 02:15:35
