運載火箭固定式發(fā)射臺無人值守系統(tǒng)設計
2019-09-23 06:20:16趙勁彪
導彈與航天運載技術 2019年4期
馮 超,趙勁彪,徐 錚,王 梁,孫 賀
(北京航天發(fā)射技術研究所,北京,100076)
0 引 言
運載火箭發(fā)射是一項高危險工作,尤其是在推進劑加注后,任何故障或失誤均有可能造成運載火箭周圍人員的傷亡。
國外很多火箭按照無人值守加注進行設計,例如歐洲阿里安系列可在-5 h(開始液氫大流量加注)左右實現人員撤離,美國SpaceX公司Falcon 9火箭加注開始后均能實現無人值守,加注流程采用遠控模式設計。俄羅斯海射天頂號能夠實現一鍵式自動發(fā)射,進入無人值守流程更早,自動化程度更高。Falcon 9火箭在執(zhí)行AMOS-6衛(wèi)星發(fā)射任務時發(fā)生爆炸,火箭與衛(wèi)星一同被炸毀,同時發(fā)射平臺損毀。本次失利雖然造成了重大的經濟損失,但是由于嚴格執(zhí)行射前安全規(guī)程進行了人員疏散,沒有造成人員傷亡。
目前,中國現役發(fā)射臺在火箭加注后還需要多項人工操作,操作人員的生命安全存在一定風險。以西昌衛(wèi)星發(fā)射中心長征三號火箭捆綁型固定式發(fā)射臺為例,火箭加注后需要發(fā)射臺進行多項操作,人員直到臨射前15 min才能撤離。此外,一旦火箭發(fā)射過程中出現故障,還需要發(fā)射臺首先完成狀態(tài)恢復,人員需要第一時間到現場搶險,操作人員的生命安全存在一定風險。
無人值守技術能夠快速、可靠的恢復箭地連接,進行前端箭上、地面狀態(tài)參數的監(jiān)測、風險評估,按程序執(zhí)行緊急預案,解除系統(tǒng)安全風險,從而提高對運載火箭發(fā)射風險的控制能力。建立發(fā)射臺無人值守系統(tǒng)能夠最大限度地減少現場值守人員,提高發(fā)射安全性和可靠性,是火箭發(fā)射流程智能化的重要環(huán)節(jié)[1]。
1 運載火箭發(fā)射流程
在火箭完成常規(guī)推進劑加注后,發(fā)射臺還需要進行多項關鍵工作。以長征三號火箭發(fā)射流程為例:
a)火箭垂直度監(jiān)測與調整。在常規(guī)推進劑加注后,通過監(jiān)測火箭發(fā)動機架上傳感器信號確認火箭一級、三級的垂直度。火箭通過尾部的4個支點與發(fā)射臺支承臂連接,通過電控系統(tǒng)控制調整發(fā)射臺4個支承臂的高度,對火箭垂直度進行調整。
b)配合火箭瞄準。臨射前,由瞄準系統(tǒng)監(jiān)測火箭起飛角度。火箭通過支承臂座在發(fā)射臺回轉部上,通過電控系統(tǒng)控制發(fā)射臺上方向機驅動回轉部轉動,帶動火箭轉動實現方位角度調整。在進行回轉前,需要人工解鎖回轉部上4個止動器,回轉結束后重新鎖緊。
c)解鎖防風裝置。在助推器加注連接器脫落后,需要人工解鎖發(fā)射臺與火箭的連接——拉桿式防風裝置。具體操作為:人工向防風拉桿活塞筒充氣使拉桿頂起,用專用扳手拆除4個支承臂上防風拉桿的墊圈和螺母,隨后放掉儲氣,使防風拉桿在彈簧力的作用下縮回支承盤內。防風拉桿拆除是火箭測發(fā)總流程中臨射前的強制檢驗項目。
d)撤收助推工作臺板。其它系統(tǒng)完成在發(fā)射臺面的工作后,需要人工拆除助推工作臺板插銷,再通過電控系統(tǒng)控制油缸縮回,撤收8個助推工作臺板。
e)其他臨射前工作。人工封好發(fā)射臺面上的各處蓋板(油源箱蓋板、液壓控制箱蓋板各2塊);撤收4個支承臂的工作梯、4個芯級工作臺板、2個引流孔蓋板;人工撤收所有外露電纜、轉接控制箱等電氣設備,并裝箱保存;人工對發(fā)射臺內的電氣、液壓設備進行防燒蝕防護;人工關閉發(fā)射臺控制間所有設備的電源和總電源。
f)應急搶險工作。發(fā)射臺崗位人員在應急搶險中,需要首先恢復防風裝置的連接固定,確保火箭的安全,再重新展開助推工作臺板與芯級工作臺板,為其它系統(tǒng)的搶險人員提供安全的工作平臺。
火箭的常規(guī)推進劑相對穩(wěn)定,而加注至火箭貯箱的液氫、液氧低溫推進劑不斷汽化膨脹,可能導致貯箱升壓甚至爆炸[2]。液氧可通過箭上氧排接口將氣態(tài)氧直接排放到大氣避免升壓,而液氫汽化后容易與空氣的混合物爆燃,不能直接向大氣排放,需要最短時間內完成氫排連接器及加泄連接器的對接。而人員在發(fā)射前均已撤離至安全區(qū)域,搶險人員回到工作崗位并完成手動對接需消耗較多時間,對人員、系統(tǒng)安全均具有較大威脅[3]。發(fā)射臺在測試、控制和技術勤務等方面仍然存在很大的安全風險。
綜上所述,隨著進入空間運載能力提升和高密度任務的開展,急需改變當前人員密集型的工作模式。
2 發(fā)射臺無人值守的功能要求
為確保火箭發(fā)射總流程不變,根據發(fā)射臺常規(guī)推進劑加注后的操作,發(fā)射臺無人值守的功能要求有:
a)防風裝置遠控解鎖。目前中國發(fā)射臺采用的防風裝置有拉桿式與壓桿式兩種形式,考慮到一旦解鎖失敗可能導致的火箭發(fā)射失敗嚴重后果,兩種形式的防風裝置均為人工手動操作,有人員的安全風險。防風裝置解鎖作為火箭測發(fā)流程的關鍵環(huán)節(jié),在無人值守系統(tǒng)中既需要通過遠控方式實現無人值守,又要保證解鎖的可靠性,是無人值守系統(tǒng)的關鍵環(huán)節(jié)。國外常采用牽制釋放或自動對接機構代替防風裝置實現牽制發(fā)射技術[4~6],但是該技術還無法適用于成熟型號火箭的改造,因此防風裝置的遠控解鎖設計仍十分必要。
b)工作臺板遠控撤收。發(fā)射臺工作臺板撤收后,人員將無法站在發(fā)射臺表面工作,因此此項工作為人員撤離前的最后一步工作。目前助推工作臺板的撤收可以實現遠控,臺板插銷的拔出為手動操作,芯級工作臺板則完全是人工拆除。如果火箭測發(fā)流程進行優(yōu)化,在人員撤離前可首先將臺板插銷拔出,拆除芯級工作臺板,則可維持人工操作,不影響工作臺板的遠控撤收。但是從發(fā)射臺智能化的發(fā)展趨勢來說,實現工作臺板的遠控功能仍需要對臺板插銷插拔與芯級臺板撤收進行遠控設計。
c)方位回轉遠控。目前發(fā)射臺電控系統(tǒng)可以實現遠控方向機驅動回轉部轉動功能,回轉前后所需的止動器操作為人工操作,因此需要在無人值守系統(tǒng)中設計可以遠控自動解鎖的止動器,組成完整的方位回轉遠控系統(tǒng)。
d)垂直度自動調平。目前發(fā)射臺已具備垂直度數據遠程監(jiān)測與電控系統(tǒng)遠控支承臂升降功能,但是垂直度監(jiān)測與垂直度調整系統(tǒng)相互獨立,實際上是通過人工判斷實現,存在一定的滯后性。一旦因為外力影響導致火箭出現垂直度偏差過大的危險情況,人工操作的應急時間過長的問題就顯現出來,無法確保無人值守時的安全。因此,需要為發(fā)射臺增加自動調平功能,將狀態(tài)監(jiān)測與垂直度調整功能通過軟件判斷后自動執(zhí)行,提高應急效率。
除以上功能需求外,臨射前的機械產品撤收、部分電氣產品撤收、發(fā)射臺熱防護均可以通過優(yōu)化測發(fā)流程提前進行,但電控系統(tǒng)設備需要一直保持連接狀態(tài),對控制系統(tǒng)的可靠性要求也有所提高。
3 無人值守系統(tǒng)設計要求
推進劑加注后無人值守帶來的問題是設備工作時間加長,可靠性要求提高,以及出現故障后的處理要求提高,因此,發(fā)射臺在開展無人值守改進方案設計時,需要滿足以下要求。
a)無人值守階段。根據火箭測發(fā)流程需求,發(fā)射臺需滿足臨射前8 h進入低溫加注流程后無人值守要求,并盡量兼顧常規(guī)加注后無人值守的要求。
b)長時間工作。在啟動無人值守后,發(fā)射臺需要長時間帶壓或加電工作,確保近遠控模型的無縫切換與狀態(tài)保持。
c)可靠性。設備工作時間加長,意味著任務可靠性要求也相應提高,需重新開展可靠性分析,并進行相關試驗,保證設備在無人值守期間的可靠性。
d)冗余設計。原來通過人員手動切換的冗余設計需要改為電動切換,或者采取其他的替代方式,以保證射前的可靠性。
e)故障診斷。無人值守后,設備出現故障時人員無法現場進行處理,只能通過遠控操作,因此發(fā)射臺需具備故障診斷及故障隔離功能,出現故障能夠及時檢測,并且采取措施隔離故障或者切換到備份系統(tǒng),以保證火箭發(fā)射總流程正常進行。
f)推遲或終止發(fā)射的適應性。火箭因其他系統(tǒng)的原因推遲或終止發(fā)射時,發(fā)射臺需啟動無人值守,從遠端進行發(fā)射臺狀態(tài)恢復,避免人員應急搶險。
4 發(fā)射臺無人值守系統(tǒng)
4.1 防風裝置遠控解鎖
防風裝置是用于連接火箭尾部支點與發(fā)射臺的關鍵結構,參考自動對接加注連接器的設計[7,8],目前中國發(fā)射臺防風裝置采用的拉桿式與壓桿式兩種方案均需人工操作,無法滿足無人值守要求,如圖1、圖2所示。
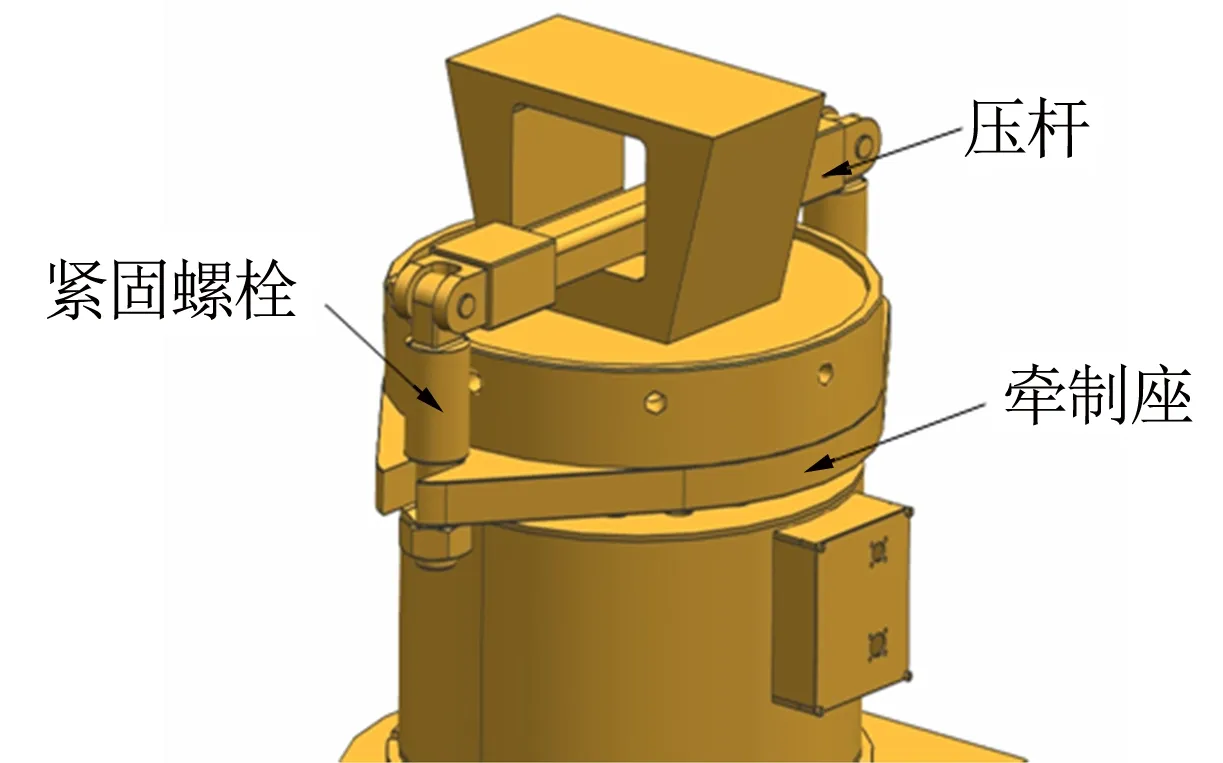
圖1 壓桿式防風裝置Fig.1 Pressure Rod Windproof Device
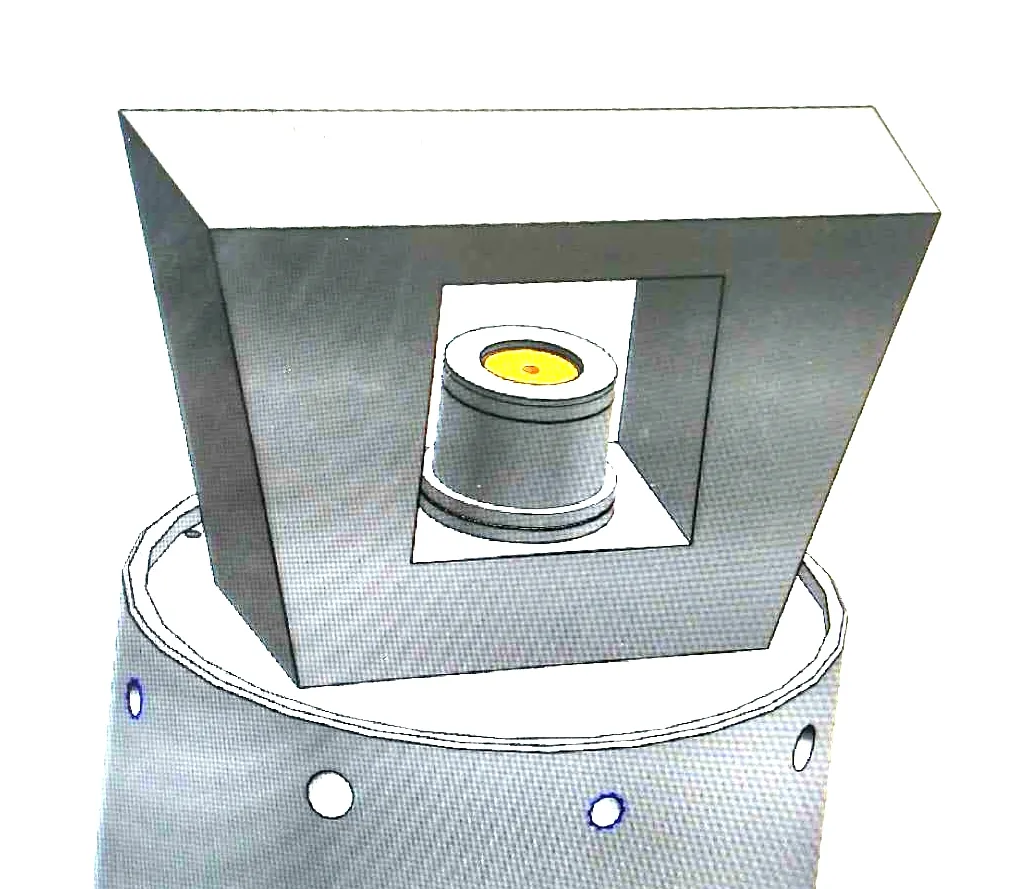
圖2 拉桿式防風裝置Fig.2 Tie Rod Windproof Device
新設計的無人值守防風拉桿在現有基礎上進行升級,主要有鎖緊機構及鎖銷兩種方案。
4.1.1 鎖緊機構式防風裝置
鎖緊機構式防風裝置與壓桿式類似,采用一套平面連桿機構代替壓桿壓緊支點孔內壁,如圖3所示。
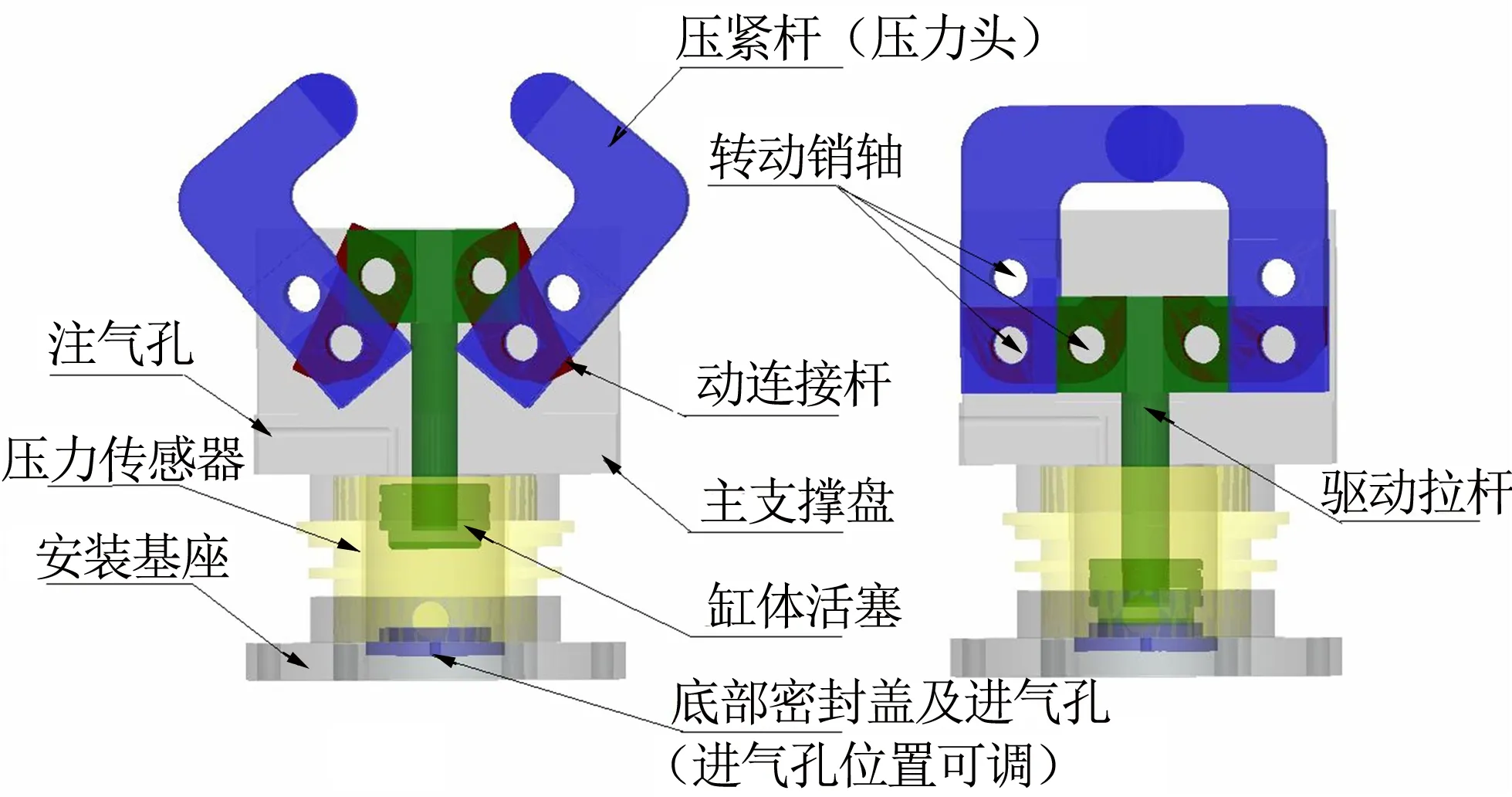
圖3 鎖緊機構式防風裝置Fig.3 Locking Mechanism Type Windproof Device
鎖緊機構的鎖緊原理為:曲柄-滑塊機構鎖緊,即由防風拉桿實現滑塊運動,壓緊桿作為曲柄運動,連桿用于連接防風拉桿與壓緊桿。使用時通過向氣缸內充氣、放氣控制拉桿的升降,拉桿帶動連桿及壓緊桿繞固定軸轉動。需要鎖緊時,通過水平的連桿實現曲柄——滑塊機構自鎖。為了平衡防風拉桿受力,每套防風拉桿配備2套曲柄-滑塊機構同時工作。
鎖緊機構式防風裝置繼承了壓桿式適應范圍大的優(yōu)點,在火箭出現故障應急搶險時,即使出現箭體輕微移動或轉動時仍可鎖緊,并且機械結構簡單,無需額外的電源或油源即可工作,易于維護。但該方式對彈簧、氣缸及連桿的可靠性要求較高,火箭吊裝時需要確保拉桿回縮到位,若因彈簧力下降導致連桿動作不到位導致連桿無法水平,則曲柄-滑塊機構無法提供壓緊桿足夠的壓緊力,而僅靠彈簧的壓力無法滿足火箭的防風要求。
鎖緊機構式防風裝置的使用流程為:火箭吊裝并與發(fā)射臺支承臂接觸后,防風裝置氣缸放氣,拉桿被彈簧力下壓下并帶動連桿、壓緊桿繞軸轉動至壓緊桿伸入火箭支點孔內并壓緊。此時連桿水平并頂緊壓緊桿,產生對支點的壓緊力。臨射前,防風裝置氣缸充氣,拉桿升起并壓縮彈簧,帶動連桿、壓緊桿轉動,當壓緊桿繞轉軸轉動不小于40°后停止,此時壓緊桿展開并讓出火箭支點起飛空間,如圖4所示。
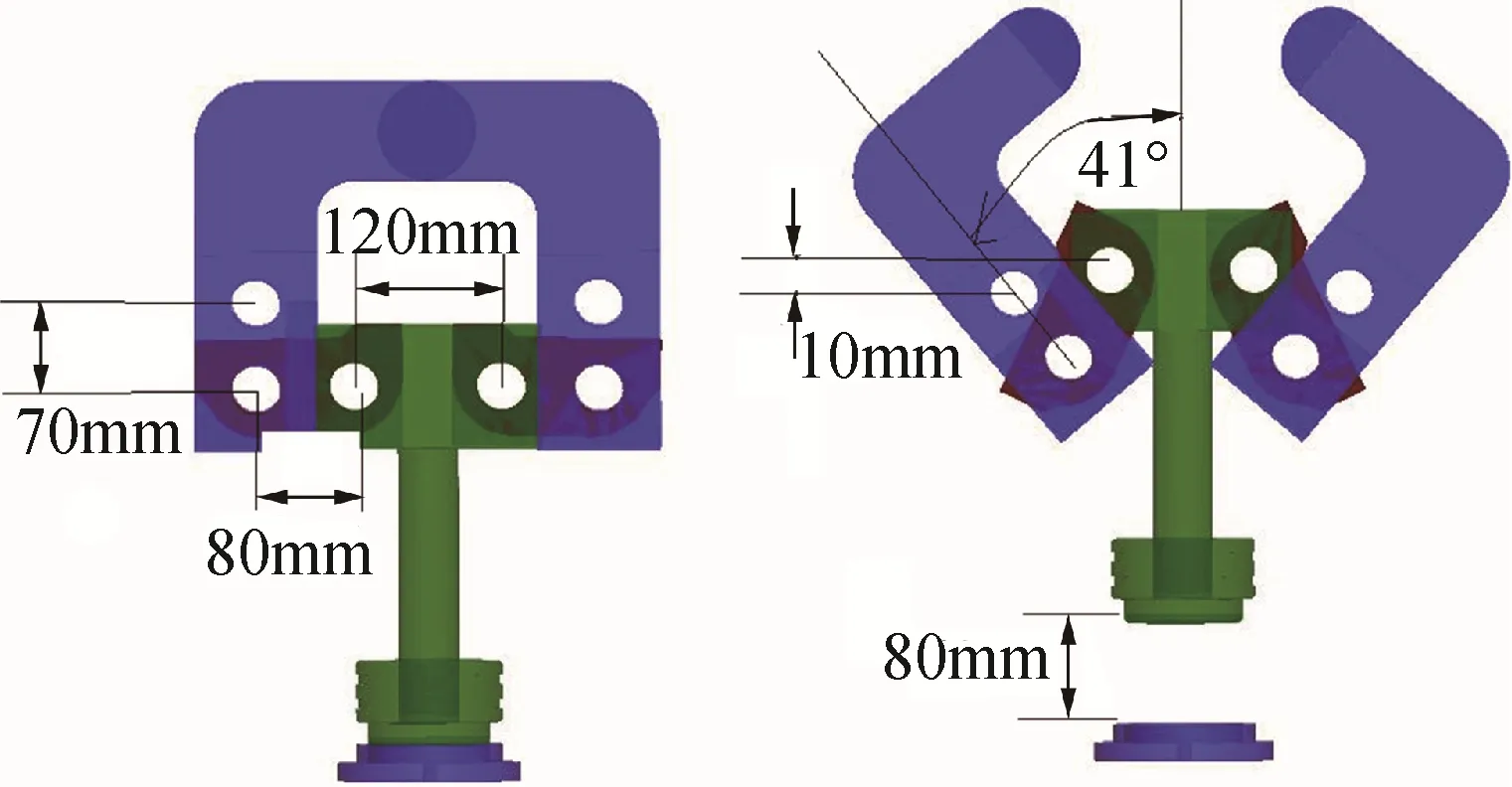
圖4 鎖緊機構工作范圍Fig.4 Working Range of Locking Mechanism
4.1.2 鎖銷式防風裝置
鎖銷式防風裝置與拉桿式類似,采用一套轉銷機構代替拉桿螺母鎖緊支點。鎖銷的鎖緊原理為:使用時向汽缸內充氣使鎖銷桿伸出,當鎖銷桿插入支點孔后啟動電機使之旋轉至鎖銷桿頂端的凸臺外圓弧面與支點內側B面接觸,此時減速電機停止轉動并在電機自帶制動器作用下制動,從而保持鎖銷凸臺與B面的接觸并持續(xù)提供壓緊力,如圖5所示。
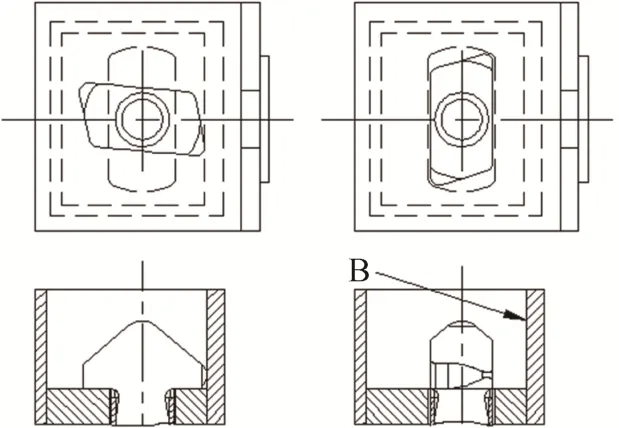
圖5 鎖銷式防風裝置鎖緊原理Fig.5 Locking Principle of Lock Pin Windproof Device
鎖銷式防風裝置的縱向拉緊力大,拉緊狀態(tài)易于保持,體積小。支承盤上無額外零件,不占用火箭支點空間,火箭吊裝時可以避免碰撞。但該方式需增加電機及控制系統(tǒng),增加的電機降低了系統(tǒng)的可靠度,并且控制軟件需要較為復雜的防差錯設計,避免因流程錯誤導致的解鎖失效。
鎖銷式防風裝置的靶場使用流程為:火箭吊裝并與發(fā)射臺支承臂接觸后,鎖銷桿凸臺與支點長圓孔呈90°并與支點內壁斜面接觸自鎖,從而壓緊火箭支點。防風裝置氣缸放氣后,由彈簧提供鎖銷桿預壓力實現防松。臨射前,向防風拉桿氣缸充氣后,啟動電機帶動防風拉桿轉動。當鎖銷與支點孔平行后氣缸放氣,鎖銷桿在彈簧力下下落至支承盤內,如圖6所示。
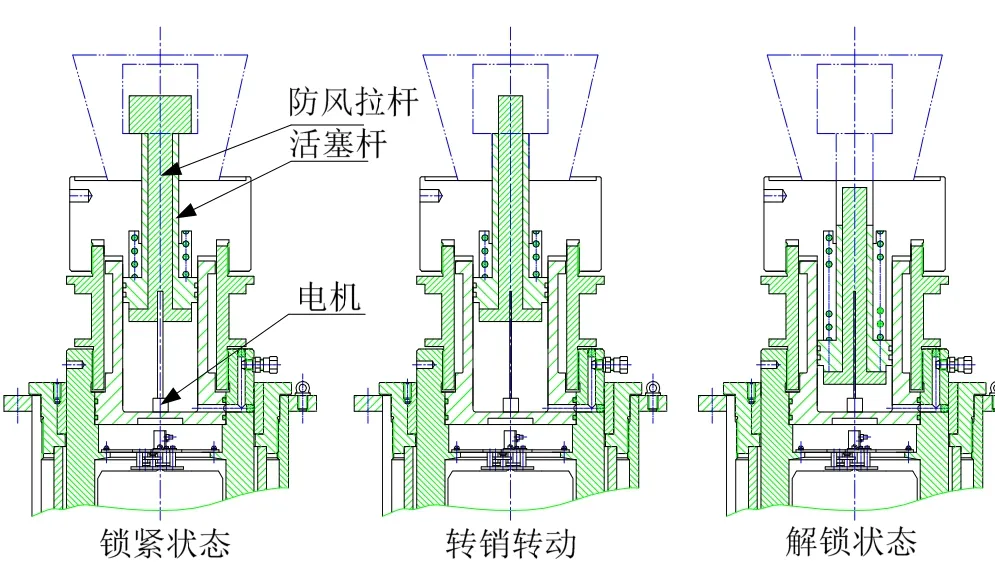
圖6 鎖銷式防風裝置工作流程Fig.6 Workflow of Lock Pin Windproof Device
4.1.3 鎖緊機構式與鎖銷式防風裝置對比
鎖緊機構式與鎖銷式防風裝置方案對比見表1。
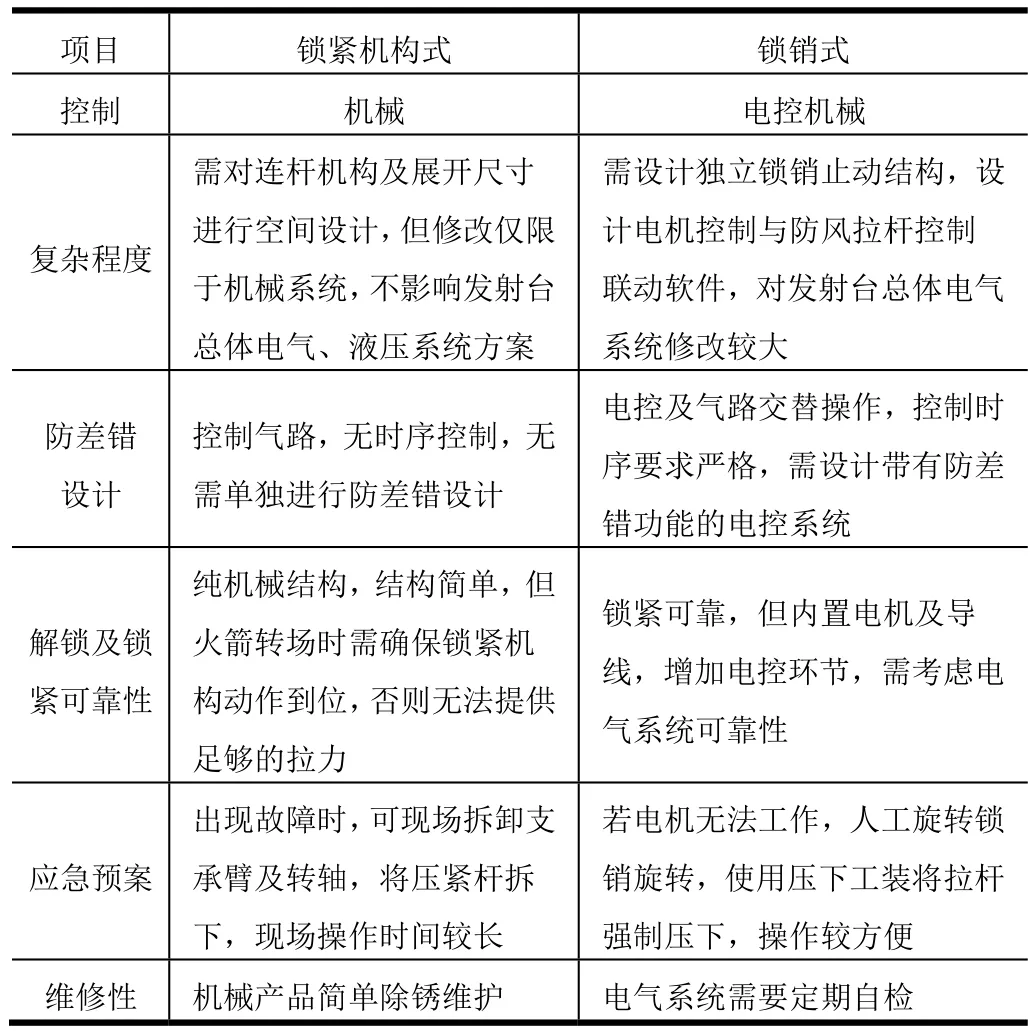
表1 無人值守防風裝置方案對比Tab.1 Scheme Comparison of Windproof Device
4.2 工作臺板遠控撤收方案
為實現發(fā)射臺的火箭燃氣流排導功能,在發(fā)射臺對應火箭發(fā)動機噴管相應位置上設有 4個助推導流孔及 1個芯級導流孔,而助推工作臺板和芯級工作臺板專門用于填補導流孔區(qū)域,提供人員及設備在發(fā)射臺上的工作平臺,如圖7所示。
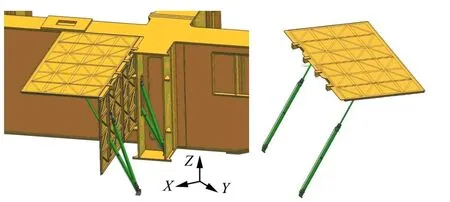
圖7 工作臺板Fig.7 Workbench
目前,發(fā)射臺的電控液壓油缸驅動臺板展收方案可以實現臨射前的遠控撤收,對于人工拆裝的臺板插銷需要使用電動推桿、電液缸等形式替代,并將動作時序加入發(fā)射臺軟件,確保在臺板展收前后插銷的自動伸縮,控制軟件首先后臺對臺板插銷伸縮控制,再啟動臺板油缸升降臺板。
4.3 方位回轉遠控方案
發(fā)射臺的方位回轉由方向機驅動,止動器對狀態(tài)鎖定。目前方向機有電控液壓驅動和手動兩種控制方式,因此可以實現遠控回轉,但回轉后的止動器鎖定則采用人工操作方式。為實現止動器的遠控解鎖,將遠控止動器改進設計為兩部分:一部分為帶彈簧的單作用油缸,需要鎖定時彈簧通過搖臂將基座下承環(huán)壓緊而止動,需要解鎖時給液壓油缸通入壓力油,活塞壓緊彈簧實現解鎖;另一部分是由手輪、螺桿和螺母組成,當火箭轉場期間長時間不需要回轉時,可以轉動手輪,使螺桿端頭頂住活塞桿的端頭,使止動器處于剛性止動狀態(tài),見圖8。此方案的止動器解鎖與止動是通過液壓系統(tǒng)后臺實現,即通油解鎖放油鎖定,因此無需對發(fā)射臺控制軟件進行修改,可靠性也更高。
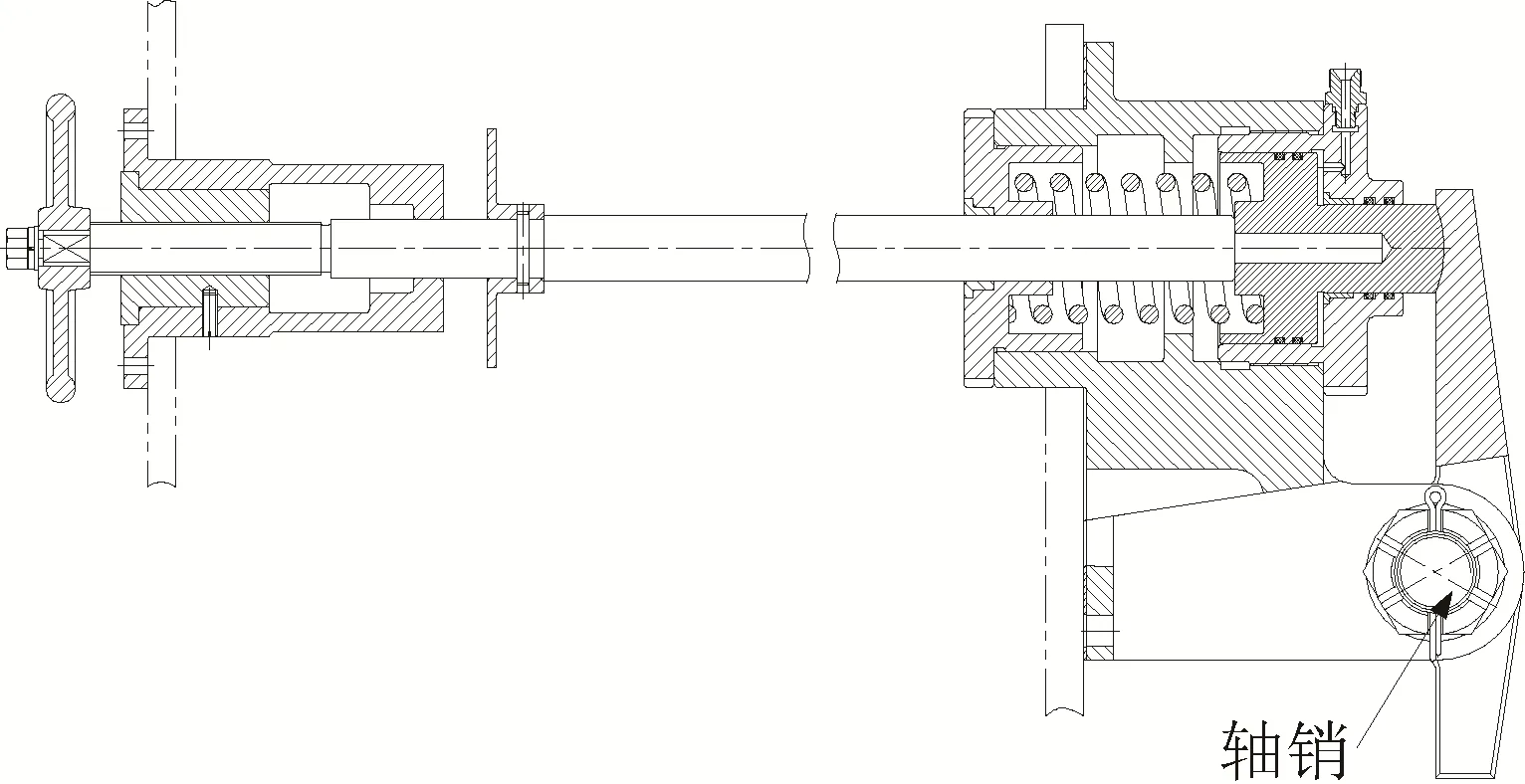
圖8 遠控止動器Fig.8 Remote Control Stopper
4.4 垂直度自動調平方案
發(fā)射臺的垂直度調整通過支承臂的升降實現,4個支承臂90°分布并與火箭的4個象限對應,如圖9所示。目前狀態(tài)的垂直度調整為人工操作,即需要在調整前讀取火箭水平傳感器讀數,再進行人工判斷需要調整的支承臂并高度調整。
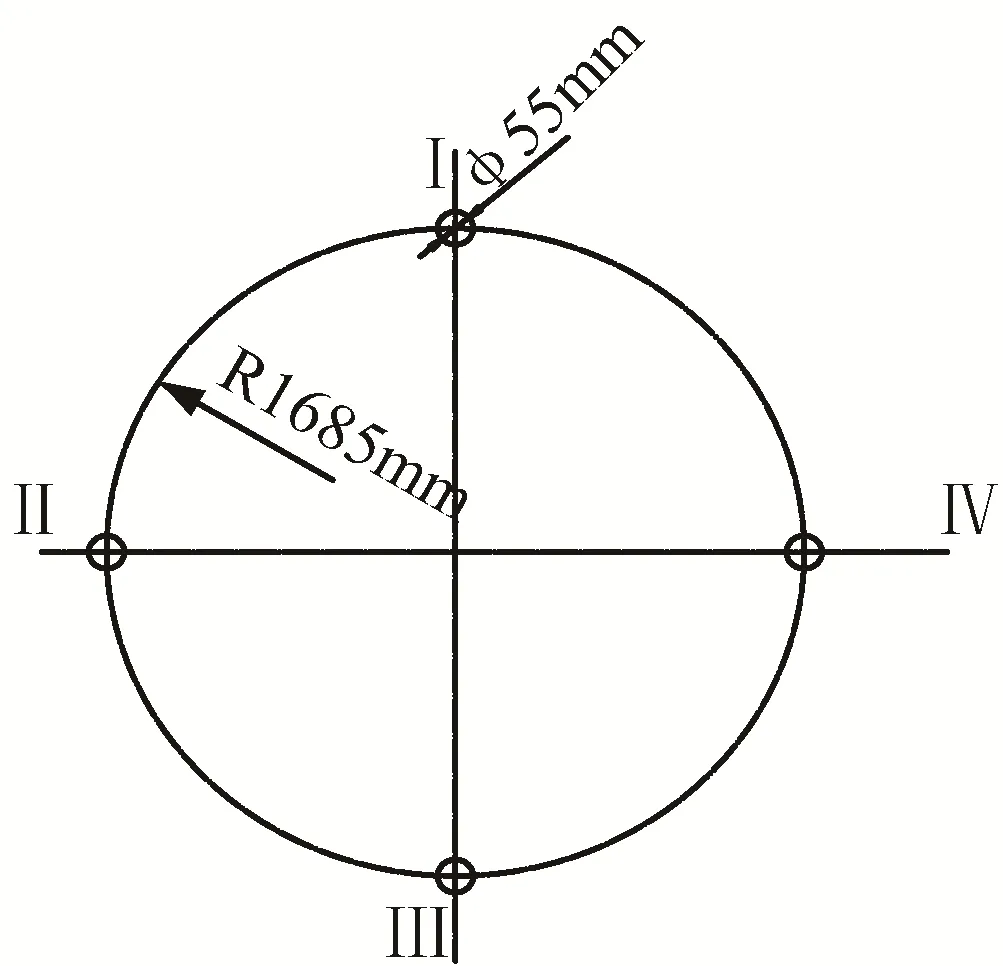
圖9 火箭支點分布Fig.9 Rocket Fulcrum Distribution Map
支承臂的升降功能可以通過電控液壓驅動或手搖方式實現,因此垂直度自動調平將水平傳感器讀數接入發(fā)射臺電控系統(tǒng),由CPU對垂直度數據進行判斷。控制系統(tǒng)可實時監(jiān)測支承臂的高度、液壓系統(tǒng)壓力等關鍵參數,并設置了高度超行程急停、高度差超差急停等自動報警功能,確保自動調平過程中的安全。
5 結 論
捆綁型固定式發(fā)射臺作為火箭發(fā)射地面支持系統(tǒng)的關鍵產品,建立常規(guī)加注后前端無人值守系統(tǒng)可以提高測發(fā)流程的自動化程度,降低人員安全風險,具有重要意義。機電液一體化的發(fā)射臺在進行技術設計時,具有技術難度高、專業(yè)涉及廣的特點。因此,在無人值守系統(tǒng)建立時借鑒了國外已有技術,結合中國火箭測發(fā)流程技術特點,充分分析發(fā)射流程中的功能需求,提出以防風裝置遠控解鎖、工作臺板遠控撤收、方位回轉遠控、垂直度自動調平為核心的技術路線及具體實施方案,在保持現有發(fā)射臺功能的基礎上實現了加注后的無人值守能力,滿足了航天發(fā)射場智能化,航天快速發(fā)射的需求,為其它地面支持系統(tǒng)設備無人值守設計提供借鑒參考。
