電動汽車用模糊PID 控制的PMSM 控制器 策略研究
2019-09-21 03:44:02楊啟東任佳越秦玉貴
汽車實用技術 2019年17期
楊啟東,任佳越,秦玉貴
(長安大學汽車學院,陜西 西安 710064)
前言
在電動汽車驅動系統中,永磁同步電機(PMSM)具有體積小、功率密度較高、調速范圍較寬、輸出轉矩較大等諸多優勢,故此得到了廣泛的應用及研究,尤其是近年來電動汽車的驅動電機大多采用永磁同步電機[1]。在電動汽車PMSM 控制系統中并將未其優越性極大地發揮,仍然使用簡單易行PID 調節器是一個主要因素,雖然PID 控制算法簡單,易于實現,但主要依靠人們的經驗獲得,因為參數一旦確定后不能實時調整,故此自適應性和魯棒性比較差,然而,當電動汽車行駛在復雜工況下對控制系統的動態控制性能以及抗擾動能力要求較高[2],因此,簡單的PID 控制器可能沒有辦法很好保持系統的優良性能。而在設計模糊控制器時候,無需依靠被控對象的精確數學模型,只需要將人們的長期控制經驗歸納成規則表并存于電動汽車的MCU 中實時查詢,因此,系統的實時性高、魯棒性強,尤其適用于非線性系統的控制,本文提出將傳統PID 控制和模糊控制的合二為一,設計在了一種適用于PMSM的模糊PID控制器以取代傳統的PID 控制器,通過仿真實驗的結果,不難證明所設計的控制策略可以很好地完成PID 參數的自整定工作,達到了提高動態性能與魯棒性的要求[3]。
1 永磁同步電機調速系統基礎理論
1.1 永磁同步電機矢量控制的數學模型
交流永磁同步電機調速系統采用矢量控制方案,其基本思想是將普通的三相交流電動機上設法模擬直流電動機轉矩控制的規律,在磁場定向坐標上,將電流矢量分解成產生磁通的勵磁電流分量和產生轉矩的轉矩電流分量,并使兩分量相互垂直,彼此獨立,然后分別進行調節,這樣將其與直流電動機從原理和特性上就可以等效了。因此矢量控制的關鍵是對電流矢量的幅值和空間位置的控制。id=0 控制在矢量控制中應用最為普遍,本文采用矢量控制中id=0 的控制方法可以獲得很寬的調速范圍,轉矩定性好,控制系統簡單。經過坐標變化,PWSM 在d、q 坐標下的轉矩方程為[7]-[8]:

式(1)中,pn為轉子磁極對數,ψf為轉子磁鏈,iq、id為定子電流矢量is在d 和q 軸的分量,Ld、Lq是d 和q 軸上電感。
表面式永磁同步電機,采用id=0 的控制方法,Ld=Lq,is與ψf在空間上正交,可以獲得最大轉矩。這時is=jiq,式(1)可以改寫為式(2):

雖然轉子以電角度ωr旋轉,但是在dq 軸系內is與ψf卻始終相對靜止,從轉矩生成的角度,可將面裝式PMSM 等效為他勵直流電動機。
1.2 PMSM 矢量控制調速系統工作原理
本文PMSM 調速系統中具有轉速、電流雙閉環的控制結構,速度外環采用模糊PID 控制器,電流環調節器采用傳統的PI 控制算法。圖1 為永磁同步電機的矢量控制結構框圖。所謂模糊PID 控制是在原有的PID 控制的基礎上,需要計算當前的轉速誤差e 和誤差變化率ec,利用所設定的模糊規則進行模糊邏輯推理,通過查詢模糊規則表對PID 轉速調節器的參數進行調整,使其達到快速性和穩定性的目的。
圖1 中,永磁同步電機由三相逆變器供電,通過光電編碼器檢測轉子轉速ωr和空間相位θr。由速度調節器和電流調節器計算出定子電壓轉矩分量Uq和Ud。之后經過坐標變換,通過SVPWM 調制器得到三相調節電壓信號,傳遞給逆變器,最終控制電機驅動。
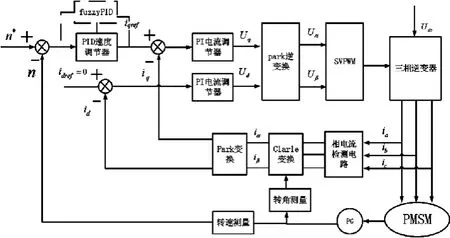
圖1 為永磁同步電機的矢量控制結構框圖
2 模糊PID 控制器的設計
2.1 模糊PID 控制器的基本原理
模糊PID 控制器是將PID 控制器與模糊控制的思想結合,模糊控制結構如圖2 所示。模糊PID 控制器在運行過程中不斷檢測誤差e 和誤差變化率ec,并將其模糊化,然后依據模糊規則進行推理,經過清晰化后再輸出3 個參數△Kp、△Ki和△Kd給PID 控制器,并依據公式(3)實現對PID 控制器3 個參數的自整定,從而使被控對象的動態性能顯著提高[4-5]。

圖2 模糊控制結構

式(3)中,Kp0,Ki0和Kd0分別是Kp,Ki和Kd的初始值,△Kp、△Ki和△Kd分別是Kp,Ki和Kd的變化量。
2.2 模糊規則庫
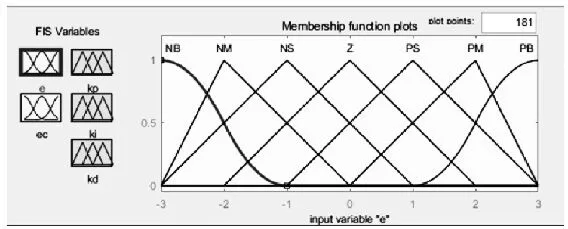
圖3 隸屬度函數
模糊化是模糊控制任務是需要輸人值、輸出值從精確值轉換為模糊值,將語言變量e、ec,Kp,Ki和Kd量化到有限整數的離散論域,例如{-3,-2,-1,0,1,2,3},并取對應的語言值為{NB,NM,NS,ZO,PS,PM,PB},即負大、負中、負小、零、正小、正中、正大;定義輸人和輸出變量的隸屬度函數,本文為了提高靈敏性,統一選用三角型隸屬度函數(如圖3 所示)。
針對于模糊PID 控制器的模糊規則表如下:

表1 △kp 的規則表
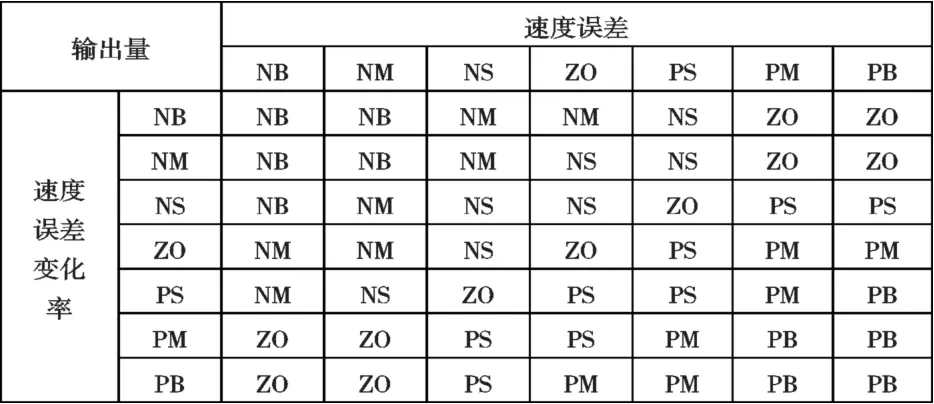
表2 △ki 的規則表

表3 △kd 的規則表
上述規則表中任意一條規則都可以表示成Ri;IF(e is Ai) and (ec is Bi) THEN u is Ci 的形式,則整個規律庫可以表示為:
R1:IF(e is NB) and (ec is NB) THEN (△kp is PB) and (△ki is NB) and (△kd is PS).
……
R49:IF(e is PB) and (ec is NB) THEN (△kp is NB) and (△ki is NB) and (△kd is PB).
3 仿真與結果
3.1 仿真模型搭建
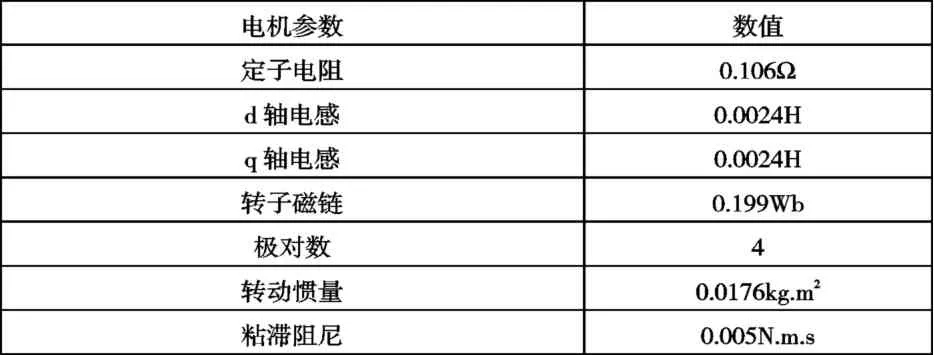
表4 仿真用表面式永磁同步電機參數
驗證控制策略的正確性,PMSM 調速系統的MATLAB/ Simulink 模型,比較模糊PID 控制和傳統PID 控制兩種控制策略的仿真效果,系統直流母線電壓為311V,表面式永磁同步電機的相關仿真參數如表4 所示。
初始設置電動機空載啟動下參考轉速給定值為400r/ min,在0.04s 時,給電機突加100Nm 負載,兩個控制策略下轉速控制圖如圖4 所示。
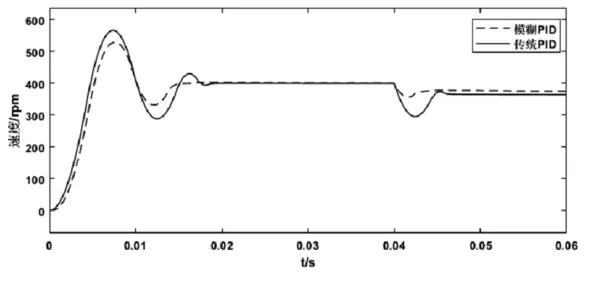
圖4 仿真結果對比
在動態性能來看,在空載下給定參考轉速400 r/min,采用模糊PID 控制的超調量要小于傳統的PID 控制,且最終的調節時間從圖也可知要少于傳統控制。針對于穩態下抗負載的擾動能力的比較,在100Nm 負載下,模糊PID 控制轉速變化的幅度以及恢復時間都要小于傳統PID 控制。故此,采用模糊PID 控制永磁同步電機系統的動、靜態性能和抗干擾能力都優于傳統的PID 控制,波動小,更快趨于穩定,具有較強的魯棒性。
4 結論
將模糊控制引入到永磁同步電機系統的控制中,將模糊控制的思想與PID 控制所結合。仿真實驗結果表明:采用模糊控制器的系統的動性能和抗干擾能力均優于傳統的PID 控制,且對于系統的參數變化具有較強的魯棒性。所設計的基于模糊控制PID 策略下的電機運行具有良好的性能,可以有效提升電動汽車的動力性能,使PMSM 在電動汽車的驅動領域上更大發揮其優越性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45
