一種復合驅動指關節設計與仿真
2019-09-19 07:41:24李阿為郗夢璐馬翔宇劉家豪
重慶理工大學學報(自然科學) 2019年8期
李阿為,郗夢璐,李 玲,馬翔宇,劉家豪
(西安航空學院 機械工程學院, 西安 710077)
隨著社會的不斷發展,機器人研究也在不斷取得進步,其執行裝置的精度也得到了提高。然而,機器人末端執行裝置已不能滿足復雜、多變的環境。因此,開發一種實用性強、可在各種復雜多變環境下進行快速工作的機器人靈巧手已經成為技術發展的必需。隨著新型材料和新工藝的開發,越來越多的新型智能材料,如高分子材料、形狀記憶合金(shape memory alloys,SMA)[1]等,受到了機器人領域科學研究人員及專家的肯定和關注,并慢慢代替了傳統的電機驅動方式。1962年由Tomovic、Boni共同研發的Belgrade手最開始是為南斯拉夫的一位傷寒病患者而設計的,它被認為是世界上最早的靈巧手[2]。日本研發的Okada手采用電驅動縫式關節,靈活性有限,只能進行簡單的重復性動作[3]。20世紀80年代,許多國家對于機器人靈巧手的研制開發都投入了大量的精力,誕生了以多自由度、可控制、具有多種感知功能為標志的現代意義上的靈巧手,如Utah/MIT手[4]、Stanford/JPL手[5]、styx手[6]等。我國從20世紀80年代后期開始研究靈巧手,代表有北航研制的BH系列靈巧手,包含BH-1、BH-2、BH-3、BH-4型等多種多指靈巧手[7]。文獻[8-9]設計了一種機械靈巧手,滿足了手指的基本使用功能。由于機械傳動、驅動、傳感、電子等方面技術和控制方法的技術局限性,減慢了靈巧手的發展節奏。總而言之,通過國內外現有的研究情況,可以發現存在諸多問題,比如驅動方式缺乏靈活性、自由度低、反應能力較慢等。大多數設計的靈巧手手指關節通常都會采用單一驅動的方式,這樣的靈巧手驅動方式可靠性和抓取反應效率都比較低。本文設計了一種復合驅動指關節,驅動可靠性強,指關節的抓取反應效率也大大提高。
本文通過研究人手運動機理,對指關節進行結構設計,關節采用電機-SMA復合驅動。為區別電機與SMA兩種驅動的方式,對其分別進行運動仿真。仿真結果表明:所設計的復合驅動關節滿足設計要求。
1 結構設計
復合驅動是目前靈巧手開發的一個重要的研究方向。復合驅動指關節的設計涉及了許多方面,包括機械機構的設計、驅動系統的設計和控制系統的設計。為了提高指關節的反應速度及抓取效率,設計了一種SMA驅動器來和電機共同驅動以達到復合驅動的目的。電機驅動的輸出位移大、運行可靠,但是電機的功重比較低,手指關節很難滿足抓取反應速度的要求。形狀記憶合金功重比較高、質量輕、驅動力大、反應快,使其能廣泛應用于對機構質量、尺寸要求較嚴格的情況。但其能耗較高、工作效率較低,并且驅動回復位移較小。
手指的運動特點是由其自身的運動原因所導致的。一個人的手有5個手指:拇指、食指、中指、無名指和小指。大多數腕骨位于拇指所在的位置,并包含1個掌骨和2個趾骨。其他4個手指位于跟骨、指間骨和手指的末端,并且都包含一個掌骨。手掌的內部肌肉控制了手指的運動。手掌和手指關節與內部的肌肉組織連接,通過大腦中的運動神經運動信號來控制手掌的運動,在收縮時肌腱受到腦部運動中心的控制,產生有距離的拉動力,以控制手指各關節的運動(圖1)。
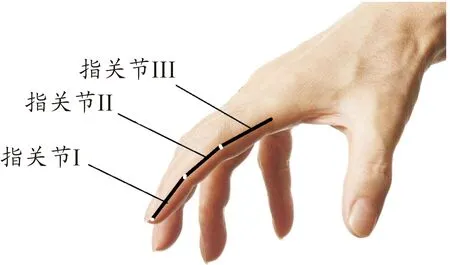
圖1 人手關節
常用的機器人傳動方式有齒輪傳動、鏈傳動、蝸輪蝸桿傳動、皮帶傳動、平面連桿機構、差動機構等。皮帶傳動具備了構造簡易、傳動平穩無噪音、沒有嚴格限制的配合距離等優點。絲桿傳動效率高、精度高、有可逆性。本設計采用皮帶傳動、絲桿傳動等傳動方式。關節處采用皮帶傳動,電機與連桿的傳動也采用皮帶傳動,形狀記憶合金與連桿的傳動采用絲桿傳動。同時,參考人手的關節構造,定義各個關節為轉動副。本設計選用三關節結構,為了方便設計和運動仿真,3個關節采用完全相同的傳動方式。圖2所示為所設計的復合驅動指關節結構圖,電機和形狀記憶合金復合驅動驅動指關節進行運動。本設計選用三關節結構,指關節的結構大小參考人手指關節的尺寸,并且根據實際設計的要求進行了小幅調整。大數據的來源為某中學青少年學生手指尺寸的統計, 統計結果見表1。

1.指關節Ⅲ; 2.電機; 3.連桿;4.指關節Ⅱ; 5.固定塊Ⅰ; 6.固定塊Ⅰ; 7.指關節Ⅰ;8.皮帶Ⅱ; 9.形狀記憶合金驅動器;10.皮帶輪Ⅳ; 11.皮帶輪Ⅲ; 12.固定桿;13.皮帶輪Ⅱ;14.皮帶Ⅰ; 15.皮帶輪I
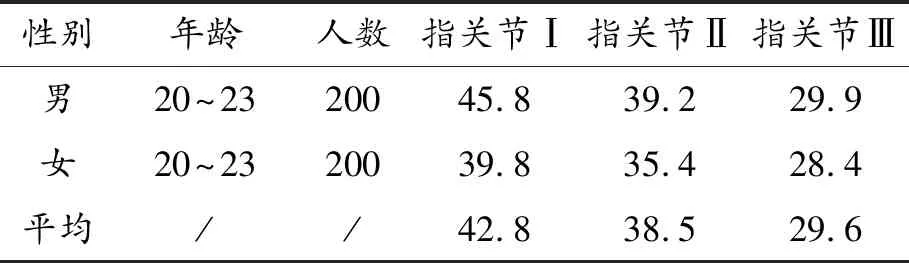
圖2 復合驅動指關節結構
在本文設計的復合驅動器中,SMA驅動器主要是為了提高手指的抓取反應速度。在常規抓取中,指關節由電機驅動;在反射抓取過程中,為了提高指關節的抓取反應速度防止被抓物體滑落,指關節由SMA驅動。具體工作原理為:在常規抓取中,電機轉動,通過皮帶傳動帶動連桿轉動,連桿帶動皮帶輪轉動,以實現指關節的彎曲運動;在反射抓取過程中, SMA絲通電加熱收縮產生驅動力矩,拉動連接塊移動,由于連接塊與連桿是螺紋連接,故連桿轉動,同樣連桿轉動帶動皮帶輪轉動,指關節發生彎曲運動,從而實現復合驅動的目的。
2 運動仿真
將指關節Ⅲ及指關節Ⅲ上的電機、張緊裝置、固定桿和形狀記憶合金作為第1個連桿,并選擇固定連桿;指關節Ⅲ上的第1個皮帶輪作為第2個連桿;指關節Ⅲ上的第1個皮帶輪定義為第1個旋轉副;以此類推定義8個連桿與7個運動副。仿真結果見圖3、4。
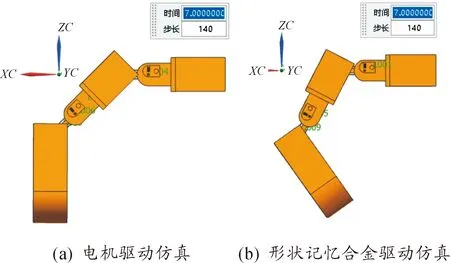
圖3 仿真演示截圖

圖4 指關節II位移/速度/加速度曲線
通過對比位移、速度、加速度曲線可見,指關節Ⅱ電機驅動的位移約為80°,最大速度可達到8.6 (°)/s,最大加速度可達到3.4 (°)/s2。SMA驅動的位移為約為76°,最大速度可達到12 (°)/s,最大加速度可達到4.7 (°)/s2。綜上所述,SMA驅動的加載速度明顯優于電機驅動。
3 軌跡規劃
軌跡規劃是提高機器人智能和自主能力的關鍵技術,研究可行、實用、實時的軌跡規劃方法對于實現機器人智能與自主是至關重要的。本文此處采用Matlab軟件中運算方法進行軌跡規劃。依據實際尺寸,在Matlab里建立三維模型,見圖5。
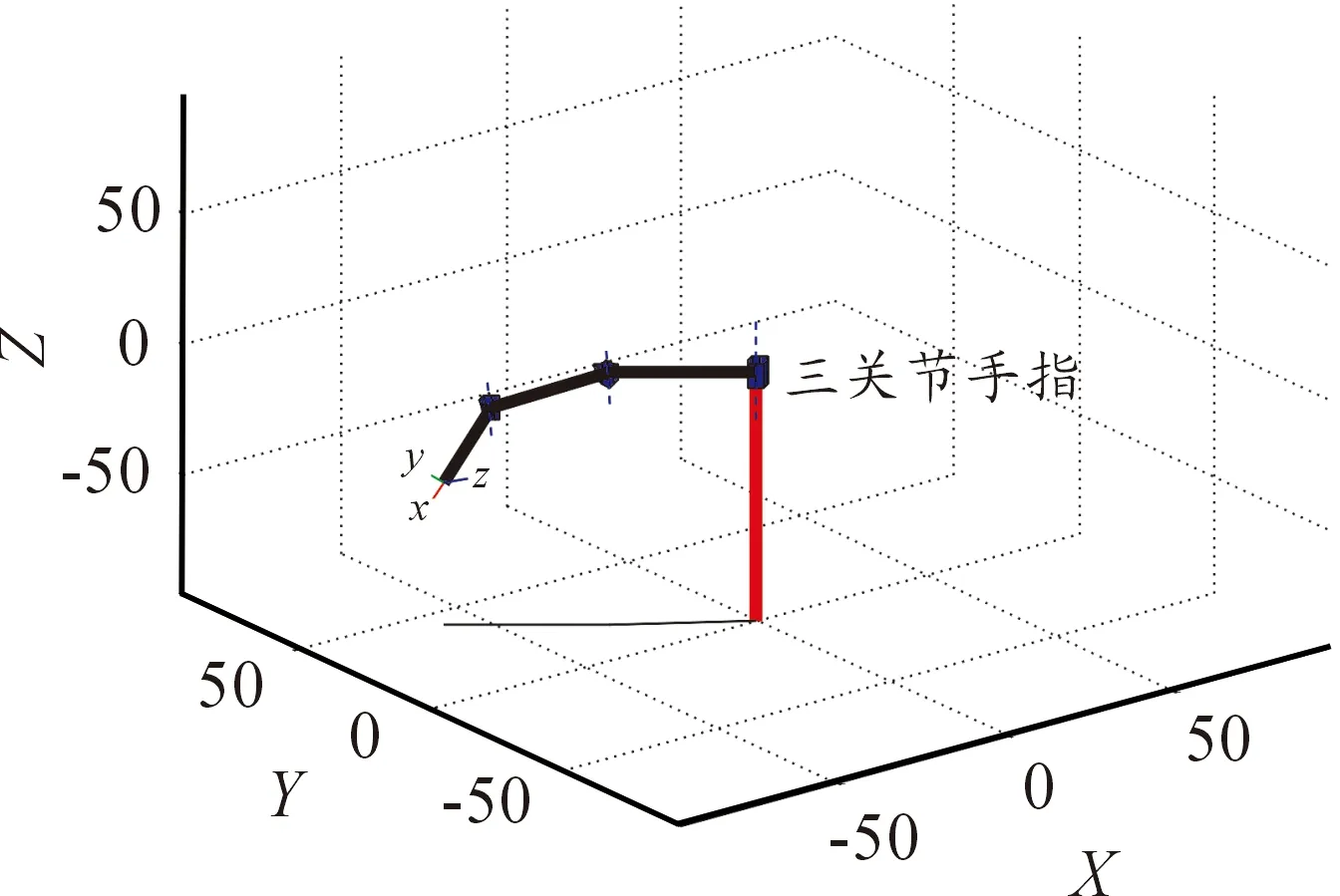
圖5 指關節三維模型
起始角度、終止角度分別為:
q0=[8,25,45]*pi/180
q1=[120,120,100]*pi/180
依據軌跡規劃的要求,求解各關節的角速度和角加速度,仿真結果如圖6所示。
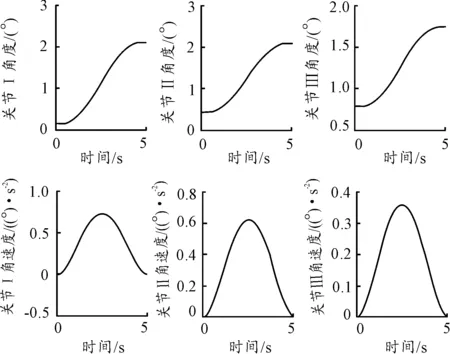
圖6 軌跡規劃結果
4 結論
針對現有的單一電機驅動指關節加載速度慢、反射抓握性能有限的問題,提出并設計了一種形狀記憶合金與電機復合驅動指關節,形狀記憶合金的加入主要用于提高手指的反射抓握速度。根據復合驅動系統設計原則、互補原則、兼容原則,提出并設計了形狀記憶合金與電機復合驅動指關節,建立了復合驅動指關節的三維模型,并對其進行運動仿真和仿真驗證。運動仿真結果表明,所設計的復合驅動關節滿足要求,為復合驅動的研究提供了一定的參考。
猜你喜歡
化學教與學(2023年5期)2023-04-03 06:12:14
廣東建材(2021年6期)2021-07-01 02:24:02
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
科學技術創新(2020年21期)2020-01-06 20:58:51
中學生數理化·八年級物理人教版(2019年12期)2019-05-21 07:26:42
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國工程咨詢(2015年8期)2015-02-16 06:38:52