基于主動變道策略的汽車緊急避障系統研究
2019-09-13 07:49:50段婷婷呂冬慧陳寬胡順堂王毓
時代汽車 2019年12期
段婷婷 呂冬慧 陳寬 胡順堂 王毓
天津中德應用技術大學 天津市 300350
近年來,社會經濟的飛速發展極大地提高了國民購買能力,同時也促進了汽車產業的蓬勃發展。在提供便利性的同時也造成了交通擁堵等事故頻頻發生。從保證乘駕人身財產安全和降低交通事故發生率的角度出發,研究以預防為核心的先進車輛主動安全控制系統則是當下交通的迫切需求[1]。
汽車主動變道的研究屬于自動駕駛ADAS的范疇,主要是汽車依靠先進的車載傳感器獲取前方道路、目標車輛及自車的狀態信息,利用主動變道路徑規劃算法對狀態信息進行分析處理,及時改變行車路徑,以避免或減輕交通事故帶來的安全問題[3]。目前存在的主動避障多是縱向避障策略,其主要通過制動來控制與前車的距離,而較少考慮主動轉向變道的控制策略。因此在進行縱向避撞研究的同時,加入主動變道系統的研究對于未來交通而言是十分有意義的。
本文對汽車主動避障系統進行研究,通過變道軌跡規劃策略對汽車變道軌跡進行規劃,并且采用模型預測控制器提供跟蹤控制策略,對于汽車行駛時安全性和穩定性的研究有很大的意義。
1 安全距離模型
對于整個汽車主動變道系統,系統若要實現整個主動變道過程的完成,需要規劃出汽車應當行駛的路徑,然后設計控制器對規劃出的軌跡進行跟蹤控制,進而實現整個主動變道系統的工作。
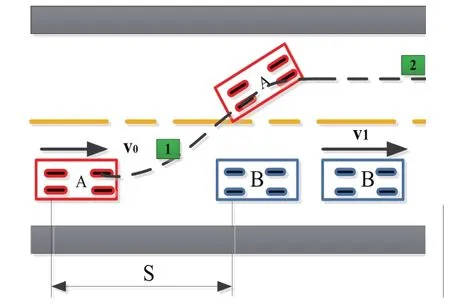
圖1 變道軌跡規劃
當雷達測得的兩車間相對距離達到安全限定值時,主車主動變道系統指揮主車進行轉向操作,確保兩輛車不發生碰撞的最小距離稱為最小安全距離S;采用主動變道的方法,汽車開始轉向的時刻需要剛剛好,同時需要確定主車臨界轉向距離D。
(1)最小安全距離S
考慮到汽車行駛的安全性,汽車緊急制動時制動距離Sb,汽車在緊急制動完全停止時,與前方障礙物應該留有一定的距離S1。汽車進行變道之前應該預留的相對距離至少為:

研究表明,S1距離一般取2.5~3米;測得不同轎車的制動試驗數據,利用最小二乘法擬合得到的車輛制動公式為:

因此,

(2)轉向臨界距離DS
如果汽車轉向時,輛車車距較大,有可能會導致駕駛員出現操作失誤的現象;如果汽車轉向時兩車的相對距離較短,則會出現緊急轉向的情況,會使車輛出現側翻或失穩現象,因此我們需要選取一個合適的轉向臨界安全距離[2]。

式中,vr為兩車的相對速度;t為變道時間。
2 基于模型預測控制的路徑跟蹤
MPC即為模型預測控制,主要包含三個重要的組成部分,即為預測模型、滾動優化和反饋控制三個模塊。主要作用原理是MPC測量信息并在線求解規定時間的開環優化問題,并將求解獲得的控制序列的第一個元素來作用于被控對象[3]。在下一個采樣時刻,重復上述過程,刷新優化問題并重新求解。該算法主要包括三個過程:預測系統未來動態、求解開環優化問題以及將優化解的第一個元素作用于系統[5]。
對于一個非線性系統,一般采用如下的離散模型:
式中: 表示為系統的狀態轉移函數,為 維狀態變量, 為 維控制變量, 為狀態變量約束, 為控制變量約束。
設定 為系統的一個穩定點,同時也是系統的控制目標,對于任意的時域N,考慮如下的優化目標函數 :




在下一個采樣時刻,系統重新以新的采樣時刻作為初始狀態進行求解,同時將控制序列的第一個元素施加給受控對象,循環該步驟,直至整個控制過程完成。
3 仿真結果
為更好驗證非線性MPC控制器對規劃軌跡的跟蹤效果,本文采用Carsim與Simulink聯合仿真分析,針對低速和中速工況進行仿真和軌跡的跟蹤效果。在分析過程中,主要對整車的橫擺角速度和側向加速度及實際跟蹤軌跡對比的分析,仿真的變道軌跡跟蹤圖如圖2所示。

圖2 變道軌跡跟蹤圖
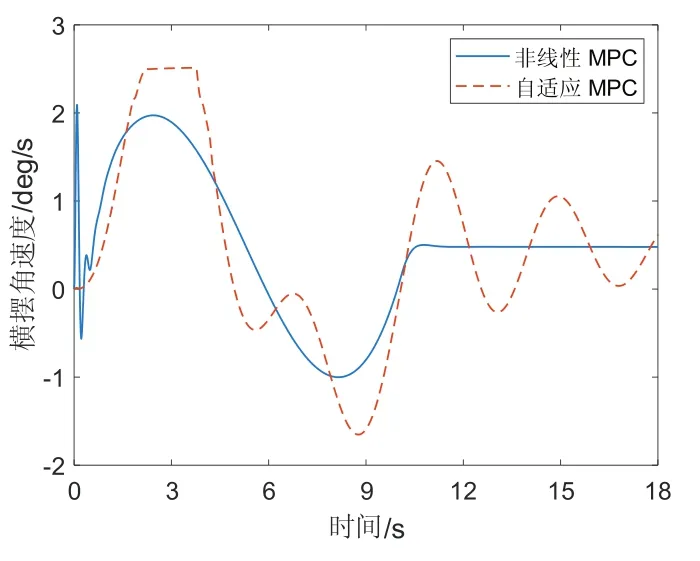
圖3 低速工況橫擺角速度分析對比
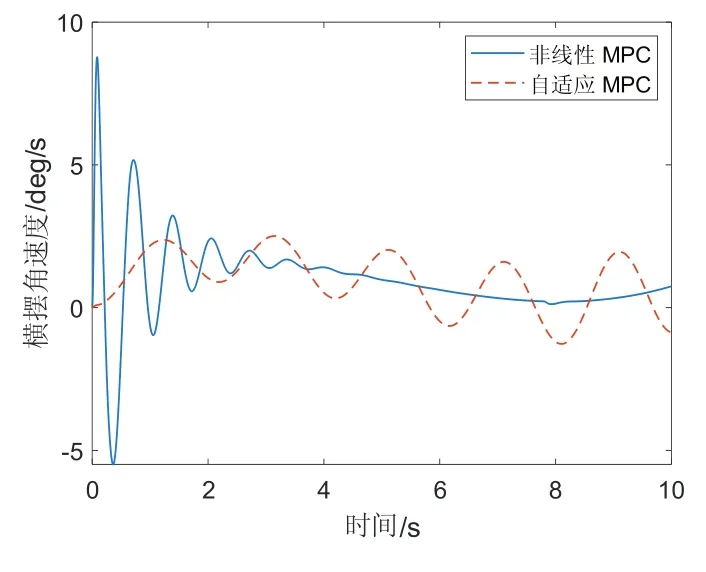
圖4 中速工況橫擺角速度分析對比
通過圖3和圖4分析可以得到,在30km/h低速和60km/h中速運行的情況下,汽車在進行軌跡跟蹤過程中,自適應MPC控制器進行跟蹤控制時橫擺角速度波動范圍較大,而非線性MPC控制器進行跟蹤控制時橫擺角速度趨于穩定,說明在中速跟蹤時非線性MPC控制器的穩定性更好。
通過圖5分析可以得到,在30km/h低速和60km/h中速運行的情況下,汽車在進行軌跡跟蹤過程中,自適應MPC控制器進行跟蹤控制時側向加速度波動范圍較大,而非線性MPC控制器進行跟蹤控制時側向加速度趨于穩定,說明在中速跟蹤時非線性MPC控制器的穩定性更好。
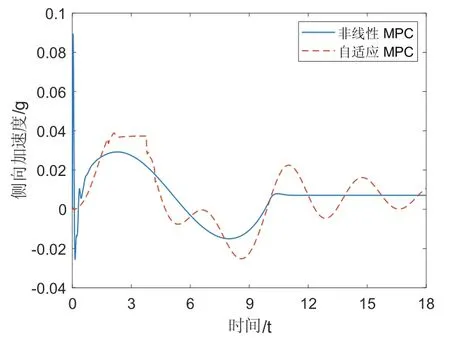
圖5 低速工況側向加速度分析對比
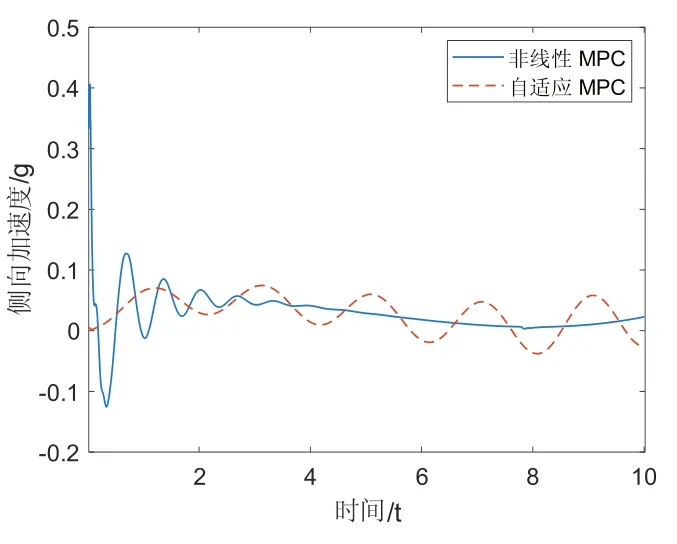
圖6 中速工況側向加速度分析對比
4 結論
本文基于汽車的主動變道策略,研究了基于安全距離和最小轉向距離的汽車軌跡規劃,提出了汽車在緊急避障的主動變道時的軌跡規劃,并采用基于模型預測控制軌跡跟蹤控制器對規劃的軌跡進行跟蹤控制,通過仿真分析對兩種模型預測控制器的跟蹤結果進行評價,結果顯示,由非線性模型預測控制器進行的軌跡跟蹤控制具有較好的控制效果。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
領導決策信息(2018年50期)2018-02-22 06:17:16
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年5期)2017-08-22 03:35:26
山東工業技術(2016年15期)2016-12-01 05:31:22
中國衛生(2016年2期)2016-11-12 13:22:16
作文大王·低年級(2016年4期)2016-04-18 00:24:37
中國工程咨詢(2016年4期)2016-02-14 07:28:28
決策探索(2014年21期)2014-11-25 12:29:50